一种基于双目单探测器的水下三维成像系统
1.本发明涉及三维成像技术领域,尤其涉及一种基于双目单探测器的水下三维成像系统。
背景技术:
2.在水下三维成像技术中,一般的水下双目立体视觉系统采用了主动照明光源、双光学系统、双探测器的组合。一方面是因为典型的面阵型感光芯片价格不再是影响三维成像系统成本的主要原因,另一方面是采用双探测器能够简化光学系统设计,而且双探测器的软件标定与图像处理也日趋简化。所以典型的水下双目立体视觉系统采用的都是双探测器的设计。
3.但是因为水体环境对电磁波有强烈的吸收与散射,现有的水下光学成像技术存在成像质量差,成像距离短的问题。因此,典型的水下双目立体视觉系统也有成像距离近,距离分辨率受水体环境影响较大的缺陷。为提高三维光学成像距离,新的照明光源和感光探测器正在被广泛试验与研究。这其中有代表性的技术有:基于条纹管的三维成像技术、点扫描水下三维成像技术、利用距离选通成像重构水下三维图像的技术等。
4.相比之下,激光距离选通技术有精度高、成像距离较长等特点。但利用激光距离选通成像获得的三维图像,需要高精度的激发脉冲同步控制,往往要到达皮秒级的同步精度,增大了系统的复杂度,难以实现。如果利用两套探测器和光学系统构成传统的双目立体视觉成像系统,不仅控制系统复杂度升高,还有成本急剧升高的问题。
5.目前的水下三维成像技术采用的主要有两种方法:水下激光距离选通三维成像和水下双目立体视觉成像。
6.水下激光距离选通成像技术的基本原理是工作在蓝绿光波段的脉冲照明激光主动照射目标,高精度的控制系统控制探测器接收信号的时间,使得只有特定距离上的目标反射光能够被探测器收集并成像。水下激光距离选通成像技术除了可以获得目标的二维灰度图外,也可以通过选通切片,对不同距离上的目标成像,来获取深度数据,计算得到目标的三维信息。但是为了得到较高精度的三维信息,选通切片需要非常薄,即激光脉冲的脉宽和选通探测器门宽需要到达纳秒甚至皮秒级,整体系统的电子系统较为复杂和精密,对成本的需求高。且要获得高精度的三维图像需要长时间的获取和处理二维图像,三维图像的实时性难以保证。
7.水下双目立体视觉成像技术的基本原理是基于视差原理,通过不同位置的两套成像系统获取目标的不同图像,通过计算两幅图像的对应点位置偏差来获取深度信息,进而得到水下物体的三维信息。因为电磁波在水下的迅速衰减(红光10m以内,黄橙光10-30m,绿光100m左右,蓝光最深到500m),较深的水下目标难以获得环境光的照明,所以水下双目视觉系统需要附带主动照明光。而采用主动照明会导致信噪比低,成像制冷差。因为需要获取目标的全面色彩信息,成像距离受红光传输距离限制,典型水下双目视觉系统的探测距离仅为几米,成像距离过短。
8.综上所述,现有的水下三维成像技术均存在使其无法满足实际应用需求的缺点。
技术实现要素:
9.有鉴于此,为了克服上述现有技术的缺陷,本发明提出了一种基于双目单探测器的水下三维成像系统。
10.所述水下三维成像系统包括:控制模块、照明模块和成像模块;
11.所述控制模块连接所述照明模块和所述成像模块,所述控制模块用于控制所述照明模块和所述成像模块的开启或关闭,和记录所述成像模块形成的图像;
12.所述照明模块包括照明光源和匀光组件,所述匀光组件用于使所述照明光源发出的照明光均匀,完成对目标的照明;
13.所述成像模块包括镜头组件和探测器,所述镜头组件用于引导所述目标反射的光信号到达探测器成像。
14.具体地,所述水下三维成像系统还包括水密装置;
15.所述匀光组件设置在所述水密装置上,所述匀光组件包括第一光学窗口、第二光学窗口和第三光学窗口,所述第一光学窗口和所述第二光学窗口设置在所述第三光学窗口的两侧,所述照明光源设置在所述水密装置内;
16.所述照明光源发出的照明光通过所述第三光学窗口进入水体,所述目标反射的光信号通过所述第一光学窗口和所述第二光学窗口进入所述水密装置。
17.在一些实施例中,所述成像模块设置在所述水密装置内,所述镜头组件包括第一反射镜、第二反射镜、第三反射镜和镜头,所述第一反射镜和所述第二反射镜设置在所述第三反射镜的两侧;
18.所述第一反射镜对应所述第一光学窗口设置,所述第一反射镜用于反射从所述第一光学窗口进入所述水密装置的光信号,所述第二反射镜对应所述第二光学窗口设置,所述第二反射镜用于反射从所述第二光学窗口进入所述水密装置的光信号,所述第一反射镜反射的光信号和所述第二反射镜反射的光信号通过所述第三反射镜反射进入所述镜头,所述光信号通过所述镜头到达所述探测器。
19.所述第一反射镜反射的光信号和所述第二反射镜反射的光信号通过所述第三反射镜同时到达所述探测器进行成像。通过光学元件实现空间上间隔一段距离的双目立体视觉系统,并在单探测器的左右两边同时成像,相比现有技术而言具有减小系统复杂度、降低成本的优点。成像形成的两条光路能够将目标图像成像在探测器对称的左右两边,方便之后的图像处理。
20.在一些实施例中,所述成像模块设置在所述水密装置内,所述镜头组件包括第一镜头、第二镜头、第一反射镜、第二反射镜和第三反射镜,第三反射镜可转动地设置在所述第一反射镜和所述第二反射镜之间;
21.所述第一镜头和所述第一反射镜与所述第一光学窗口对应设置,从所述第一光学窗口进入所述水密装置的光信号经过所述第一镜头射向所述第一反射镜,所述第二镜头和所述第二反射镜与所述第二光学窗口对应设置,从所述第二光学窗口进入所述水密装置的光信号经过所述第二镜头射向所述第二反射镜;
22.所述第三反射镜用于阻挡所述第一反射镜反射的光信号,并反射所述第二反射镜
反射的光信号到达所述探测器,或,所述第三反射镜用于阻挡所述第二反射镜反射的光信号,并反射所述第一反射镜反射的光信号到达所述探测器。
23.所述水密装置内还设置有驱动件,所述驱动件连接所述第三反射镜,所述驱动件用于驱动所述第三反射镜转动。
24.所述第三反射镜阻挡所述第一反射镜反射的光信号,反射所述第二反射镜反射的光信号到达所述探测器进行成像,然后所述驱动件驱动所述第三反射镜转动,所述第三反射镜阻挡所述第二反射镜反射的光信号,反射所述第一反射镜反射的光信号到达所述探测器进行成像;
25.或,所述第三反射镜阻挡所述第二反射镜反射的光信号,反射所述第一反射镜反射的光信号进入所述探测器进行成像,然后所述驱动件驱动所述第三反射镜转动,所述第三反射镜阻挡所述第一反射镜反射的光信号,反射所述第二反射镜反射的光信号进入所述探测器进行成像。通过光学元件实现时间上间隔一段距离的双目立体视觉系统,并在单探测器感光元件的前后帧轮流成像,相比现有技术具有减小系统复杂度、降低成本的优点。
26.在一些实施例中,所述成像模块设置在所述水密装置内,所述镜头组件包括第一镜头、第二镜头、第一光阑、第二光阑、第一反射镜、第二反射镜和第三反射镜,第三反射镜设置在所述第一反射镜和所述第二反射镜之间,所述第一光阑设置在所述第一反射镜和所述第三反射镜之间,所述第二光阑设置在所述第二反射镜和所述第三反射镜之间;
27.所述第一镜头和所述第一反射镜与所述第一光学窗口对应设置,从所述第一光学窗口进入所述水密装置的光信号经过所述第一镜头进入所述第一反射镜,所述第二镜头和所述第二反射镜与所述第二光学窗口对应设置,从所述第二光学窗口进入所述水密装置的光信号经过所述第二镜头进入所述第二反射镜,所述第一反射镜反射的光信号经过所述第一光阑后通过所述第三反射镜反射到达所述探测器,所述第二反射镜反射的光信号经过所述第二光阑后通过所述第三反射镜反射到达所述探测器。
28.所述水密装置上设置有水密接头,所述控制模块通过水密电缆和水密网线连接所述水密接头。设置水密装置使水下三维成像系统能够进入水体中进行成像,水密接头能够使进入水体中的装置与控制模块实现稳定连接。
29.所述水下三维成像系统还包括脉冲控制器,所述脉冲控制器的输入端连接所述控制模块,所述脉冲控制器的输出端连接所述照明光源和所述探测器。
30.综上所述,本发明的基于双目单探测器的水下三维成像系统具有以下有益效果:将水下双目视觉系统与单个探测器相结合,利用光学元件将原本空间上分开的两幅图像成像到同一个探测器上,具体是空间上在同一个探测器上分开,或者是时间上在同一个探测器上分开。用单个探测器和光学元件实现双目视觉系统,使得成像系统对水下目标三维信息的提取简单可行,也能够降低成本。
附图说明
31.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
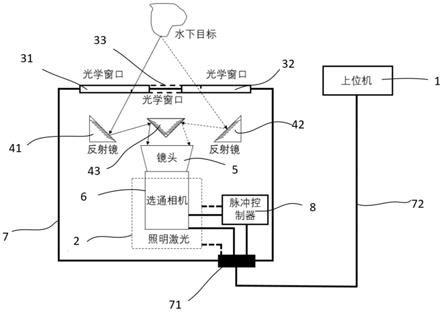
32.图1为本发明的实施例1的水下三维成像系统的结构示意图;
33.图2为张正友标定法在空腔中和水体中的应用示意图;
34.图3为选通图像到深度信息的提取示意图;
35.图4为本发明的实施例2的水下三维成像系统的结构示意图;
36.图5为本发明的实施例3的水下三维成像系统的结构示意图。
37.附图标记:
38.1-控制模块;2-照明光源;31-第一光学窗口;32-第二光学窗口;33-第三光学窗口;41-第一反射镜;42-第二反射镜;43-第三反射镜;44-驱动件;5-镜头;51-第一镜头;52-第二镜头;6-探测器;7-水密装置;71-水密接头;72-水密电缆和水密网线;8-脉冲控制器;91-第一光阑;92-第二光阑。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.本发明提供了一种基于双目单探测器的水下三维成像系统,利用一个探测器捕获两条光路所成的像,通过得到的两张图像计算得到目标的三维信息。
41.本发明的水下三维成像系统具体包括:控制模块、照明模块和成像模块。
42.控制模块连接照明模块和成像模块,控制模块用于控制照明模块和成像模块的开启或关闭,和记录成像模块形成的图像。照明模块包括照明光源和匀光组件,匀光组件用于使照明光源发出的照明光均匀以完成对目标的照明。成像模块包括镜头组件和探测器,镜头组件用于引导目标反射的光信号到达探测器成像。
43.实施例1
44.本实施例提供了一种基于双目单探测器的水下三维成像系统的具体结构。参见说明书附图1,本实施例的基于双目单探测器6的水下三维成像系统的控制模块1包括上位机,照明光源2为照明激光,匀光组件包括第一光学窗口31、第二光学窗口32和第三光学窗口33,镜头组件包括第一反射镜41、第二反射镜42、第三反射镜43和镜头5,第一反射镜41和第二反射镜42设置在第三反射镜43的两侧,探测器6为选通相机。设置有水密装置7用于容纳照明模块和成像模块,具体地,匀光组件设置在水密装置7上,照明光源2和成像模块设置在水密装置7内部。上位机位于水面上,水密装置7位于水体内,水密装置7上设置有水密接头71,上位机通过水密电缆和水密网线72连接水密接头71,水密接头71中引出线材连接水密装置7内部的照明光源2和成像模块的器件。
45.照明光源2设置在探测器6的下方,照明光源2发出的照明光通过第三光学窗口33进入水体,目标反射的光信号通过第一光学窗口31和第二光学窗口32进入水密装置7。第一反射镜41对应第一光学窗口31设置,第一反射镜41反射从所述第一光学窗口31进入水密装置7的光信号。第二反射镜42对应第二光学窗口32设置,第二反射镜42反射从第二光学窗口32进入水密装置7的光信号。第一反射镜41反射的光信号和第二反射镜42反射的光信号通过第三反射镜43反射进入镜头5,光信号通过镜头5到达探测器6。第一反射镜41反射的光信
号和第二反射镜42反射的光信号通过第三反射镜43能够同时到达探测器6进行成像。
46.进一步,水密装置7内还设置有脉冲控制器8,脉冲控制器8的输入端连接控制模块1,脉冲控制器8的输出端连接照明光源2和探测器6。脉冲控制器8用于接收上位机的指令控制照明光源2发出照明光,和,在第一反射镜41反射的光信号和第二反射镜42反射的光信号通过第三反射镜43反射到达探测器6时控制探测器6打开电子快门。
47.本实施例提供的基于双目单探测器6的水下三维成像系统用于进行水下三维成像时,进行成像的过程包括:上位机发出指令让选通相机和照明激光处于待机状态,脉冲控制器8在接收到上位机的指令后向照明激光发射激励脉冲,使照明激光发出脉冲激光,脉冲激光通过第三光学窗口33进入水体并照亮水下目标。目标反射的光信号通过第一光学窗口31和第二光学窗口32进入水密装置7,水下三维成像系统中存在两条光路,其中一条光路经第一光学窗口31、第一反射镜41、第三反射镜43、镜头5到达选通相机,另一条光路经第二光学窗口32、第二反射镜42、第三反射镜43、镜头5到达选通相机。两条光路获取的目标图像到达选通相机时,脉冲控制器8发出的激励脉冲控制选通相机打开电子快门,让两条光路获取的图像各自覆盖选通相机的感光元件的一半面积。选通相机成像后输出图像,输出的图像通过水密电缆和水密网线72进入上位机,被程序记录。
48.对输出至上位机的图像进行处理能够获得目标的深度信息,即三维信息。在图像处理过程中,将通过本实施例的水下三维成像系统输出的图像一分为二,能够用于计算目标的深度信息。如图2和图3所示,水下三维成像系统的内外参数通过张正友标定法在空气中和不同条件的水体中进行标定。通过标定后的水下三维成像系统和选通相机获取的来自水下三维成像系统的图像后,通过特征点找到两幅图中的对应点,借助标定后的相机参数,从而获得目标的深度信息。
49.在本实施例中,第三反射镜43为直角棱形反射镜,能够同时对水下三维成像系统中的两条光路中的光信号进行反射。
50.本实施例的水下三维成像系统通过光学元件实现空间上间隔一段距离的双目立体视觉系统,并在单探测器6的左右两边同时成像,相比现有技术而言具有减小系统复杂度、降低成本的优点。成像形成的两条光路能够将目标图像成像在探测器6对称的左右两边,方便之后的图像处理。
51.实施例2
52.本实施例提供了一种基于双目单探测器6的水下三维成像系统的具体结构。参见说明书附图4,本实施例的基于双目单探测器6的水下三维成像系统的控制模块1包括上位机,照明光源2为照明激光,匀光组件包括第一光学窗口31、第二光学窗口32和第三光学窗口33,镜头组件包括第一镜头51、第二镜头52、第一反射镜41、第二反射镜42和第三反射镜43,第三反射镜43可转动地设置在第一反射镜41和第二反射镜42之间,探测器6为选通相机。设置有水密装置7用于容纳照明模块和成像模块,具体地,匀光组件设置在水密装置7上,照明光源2和成像模块设置在水密装置7内部。上位机位于水面上,水密装置7位于水体内,水密装置7上设置有水密接头71,上位机通过水密电缆和水密网线72连接水密接头71,水密接头71中引出线材连接水密装置7内部的照明光源2和成像模块的器件。
53.照明光源2设置在探测器6的下方,照明光源2发出的照明光通过第三光学窗口33进入水体,目标反射的光信号通过第一光学窗口31和第二光学窗口32进入水密装置7。第一
镜头51和第一反射镜41与第一光学窗口31对应设置,从第一光学窗口31进入水密装置7的光信号经过第一镜头51射向第一反射镜41。第二镜头52和第二反射镜42与第二光学窗口32对应设置,从第二光学窗口32进入水密装置7的光信号经过第二镜头52射向第二反射镜42。第三反射镜43能够阻挡第一反射镜41反射的光信号,并反射第二反射镜42反射的光信号到达探测器6,或,阻挡第二反射镜42反射的光信号,并反射第一反射镜41反射的光信号到达探测器6。通过控制第三反射镜43的朝向能够使水下三维成像系统的两路光信号分时成像,连续两幅图像进入控制模块1的处理系统中计算深度信息。
54.进一步,水密装置7内还设置有脉冲控制器8和驱动件44。脉冲控制器8的输入端连接控制模块1,脉冲控制器8的输出端连接照明光源2和探测器6。脉冲控制器8用于接收上位机的指令控制照明光源2发出照明光,和,在第一反射镜41反射的光信号和第二反射镜42反射的光信号通过第三反射镜43反射到达探测器6时控制探测器6打开电子快门。驱动件44的输入端连接控制模块1,输出端连接第三反射镜43,驱动件44用于驱动第三反射镜43转动。在一些实施例中,设置马达为驱动件44。
55.本实施例提供的基于双目单探测器6的水下三维成像系统用于进行水下三维成像时,进行成像的过程包括:上位机发出指令让选通相机和照明激光处于待机状态,脉冲控制器8在接收到上位机的指令后向照明激光发射激励脉冲,使照明激光发出脉冲激光,脉冲激光通过第三光学窗口33进入水体并照亮水下目标。目标反射的光信号通过第一光学窗口31和第二光学窗口32进入水密装置7,水下三维成像系统中存在两条能够成像的光路,其中一条光路经第一光学窗口31、第一镜头51、第一反射镜41、第三反射镜43到达选通相机,另一条光路经第二光学窗口32、第二镜头52、第二反射镜42、第三反射镜43到达选通相机。
56.在本实施例中,第三反射镜43为转镜,使得水下三维成像系统中的两路光信号能够分时成像。具体地,当第三反射镜43以如图4所示的状态设置时,第一镜头51和第一反射镜41采集的光信号被挡住,通过第二反射镜42反射的光信号能够被第三反射镜43反射从而到达选通相机进行成像。选通相机输出图像后,驱动件44驱动第三反射镜43转动,此时第二镜头52和第二反射镜42采集的光信号被挡住,通过第一反射镜41反射的光信号能够被第三反射镜43反射从而到达选通相机进行成像。优选地,驱动件44每次驱动第三反射镜43转动的角度均为180
°
,便于之后对到达探测器6成像的图像进行处理。
57.本实施例的水下三维成像系统成像过程中只要两路光信号是分时成像即可,具体的成像顺序可以是:第三反射镜43阻挡第一反射镜41反射的光信号,反射第二反射镜42反射的光信号到达探测器6进行成像,所述驱动件44驱动第三反射镜43转动,第三反射镜43阻挡第二反射镜42反射的光信号,反述第一反射镜41反射的光信号到达探测器6进行成像。或,第三反射镜43阻挡第二反射镜42反射的光信号,反射第一反射镜41反射的光信号进入探测器6进行成像,然后驱动件44驱动第三反射镜43转动,第三反射镜43阻挡第一反射镜41反射的光信号,反射第二反射镜42反射的光信号进入探测器6进行成像。
58.光路到达探测器6后形成的图像输出至上位机进行记录,对输出至上位机的图像进行处理能够获得目标的深度信息,即三维信息。在图像处理过程中,将通过本实施例的水下三维成像系统连续输出的两张图像能够用于计算目标的深度信息。如图2和图3所示,水下三维成像系统的内外参数通过张正友标定法在空气中和不同条件的水体中进行标定。通过标定后的水下三维成像系统和选通相机获取的来自水下三维成像系统的图像后,通过特
征点找到两幅图中的对应点,借助标定后的相机参数,从而获得目标的深度信息。
59.本实施例的水下三维成像系统通过光学元件实现时间上间隔一段距离的双目立体视觉系统,并在单探测器6感光元件的前后帧轮流成像,相比现有技术具有减小系统复杂度、降低成本的优点。
60.实施例3
61.参见说明书附图5,本实施例的基于双目单探测器6的水下三维成像系统的控制模块1包括上位机,照明光源2为照明激光,匀光组件包括第一光学窗口31、第二光学窗口32和第三光学窗口33,镜头组件包括第一镜头51、第二镜头52、第一光阑91、第二光阑92、第一反射镜41、第二反射镜42和第三反射镜43,第三反射镜43设置在第一反射镜41和第二反射镜42之间,第一光阑91设置在第一反射镜41和第三反射镜43之间,第二光阑92设置在第二反射镜42和第三反射镜43之间,探测器6为选通相机。设置有水密装置7用于容纳照明模块和成像模块,具体地,匀光组件设置在水密装置7上,照明光源2和成像模块设置在水密装置7内部。上位机位于水面上,水密装置7位于水体内,水密装置7上设置有水密接头71,上位机通过水密电缆和水密网线72连接水密接头71,水密接头71中引出线材连接水密装置7内部的照明光源2和成像模块的器件。
62.照明光源2设置在探测器6的下方,照明光源2发出的照明光通过第三光学窗口33进入水体,目标反射的光信号通过第一光学窗口31和第二光学窗口32进入水密装置7。第一镜头51和第一反射镜41与第一光学窗口31对应设置,从第一光学窗口31进入水密装置7的光信号经过第一镜头51进入第一反射镜41,第二镜头52和第二反射镜42与第二光学窗口32对应设置,从第二光学窗口32进入水密装置7的光信号经过第二镜头52进入第二反射镜42,第一反射镜41反射的光信号经过第一光阑91后通过第三反射镜43反射到达探测器6,第二反射镜42反射的光信号讲过第二光阑92后通过第三反射镜43反射到达探测器6。
63.本实施例提供的基于双目单探测器6的水下三维成像系统用于进行水下三维成像时,目标反射的光信号通过第一光学窗口31和第二光学窗口32进入水密装置7,水下三维成像系统中存在两条光路,其中一条光路经第一光学窗口31、第一镜头51、第一反射镜41、第一光阑91、第三反射镜43到达选通相机,另一条光路经第二光学窗口32、第二镜头52、第二反射镜42、第二光阑92、第三反射镜43到达选通相机。两条光路获取的目标图像到达选通相机时,脉冲控制器8发出的激励脉冲控制选通相机打开电子快门,让两条光路获取的图像各自覆盖选通相机的感光元件的一半面积。选通相机成像后输出图像,输出的图像通过水密电缆和水密网线72进入上位机,被程序记录。
64.与实施例1所述的方案相比,本实施例的水下三维成像系统能够让两条光路具有更大的视野。
65.其他与实施例1相同的内容在此不再赘述。
66.可选地,第一反射镜41和第二反射镜42可以是平面反射镜,也可以是凹面反射镜。相比之下,第一反射镜41和第二反射镜42采用凹面反射镜可以拓展成像视野,但是双目光学系统的参数标定会更为复杂,从成像探测器6中获取三维信息更难。
67.本发明也可以被应用到其他需要三维测量但是探测器6价格昂贵的成像系统中,如特定波段的红外相机、日盲紫外相机等等。
68.综上所述,本发明提供的基于双目单探测器的水下三维成像系统将水下双目视觉
系统与单个探测器相结合,利用光学元件将原本空间上分开的两幅图像成像到同一个探测器上,具体是空间上在同一个探测器上分开,或者是时间上在同一个探测器上分开。用单个探测器和光学元件实现双目视觉系统,使得成像系统对水下目标三维信息的提取简单可行,也能够降低成本。
69.本发明通过一套探测器加上光学系统,构建分辨率高、成像距离远、成像速度快的水下三维成像系统。本发明的水下三维成像系统形成的图像能够从单幅图像中获取目标的三维信息,能够实现二维灰度图和三维深度信息的实时显示。
70.以上所述仅为本发明的较佳实施例,并不用以限制本发明,除了以上实施例以外,还可以具有不同的变形例,以上实施例的技术特征可以相互组合,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1