一种输送带物料流体积实时估测方法与流程
1.本发明属于物料体积测量领域,更具体的说涉及一种输送带物料流体积实时估测方法。
背景技术:
2.利用输送带进行物料输送,使物料进入下一工序,比如对物料进行破碎、研磨、包装、分选等等操作,现有技术中,对输送带输送的物料多只有重量测量,用重量来控制输送带输送的速度,避免后工序的生产压力,也避免后工序出现空闲问题。然而对于重量与各工序加工之间不能很好的建立伺服控制,各个物料的重量和体积也不能呈一定的线性关系,由重量来对输送进行伺服控制,往往会造成后续工序的压力或生产效率低的问题。现有技术中,为解决上述问题,也提出了一些对物料流进行在线体积测量的方法,但是其测量方法依赖的设备要求高,计算过程复杂,医疗数据系统要去高,成本高,不能被推广应用。
技术实现要素:
3.本发明的目的在于提供一种输送带物料流体积实时估测方法,估测方法简单快速,设备要求低,设备成本低。
4.本发明技术方案一种输送带物料流体积实时估测方法,包括
5.结构光光源模组,照射至输送带上设定的测量位置的输送带表面或被所述输送带输送且位于所述测量位置的物料流表面;
6.ccd相机,与结构光光源模组等高设置,且获取被所述结构光光源模组照射的测量位置的输送带表面图像或测量位置上被输送的物料流表面图像;
7.中央处理器,接收所述ccd相机传输过来的测量位置输送带表面图像信息和测量位置上被输送的物料流表面图像信息,并根据测量位置输送带图像信息和测量位置上被输送的物料流图形信息计算出测量位置输送的物料流的体积;
8.首先,所述结构光光源模组照射至测量位置的输送带表面,获得无畸变的初始测量位置图像,所述中央处理器在初始测量位置图像上标记出各初始点a1、a2、a3
……
an;同时,标注各点的坐标;同时,确定初始测量位置图像中心点n1,中心点n1与a1、a2、a3
……
an中一点重合;
9.然后,中央处理器接收测量位置上被输送的物料流表面图像,同时,在物料流图像表面标记出各测量点a1、a2、a3
……
an;测量点a1、a2、a3
……
an与初始点a1、a2、a3
……
an一一对应,同时,标注各点的坐标;
10.再后,根据三角法测量原理计算出各个测量点a1、a2、a3
……
an的位置高度h1、h2、h3
……
hn,选定两两相邻的四个测量点作为计算物料流体积的最小单位块,计算出本最小单位块的面积,结合本最小单位块物料的高度,计算出本最小单位块的物料流体积;对所有的最小单位块物料流体积求和,即获得测量位置的输送带表面输送的物料流体积。
11.优选地,所述结构光光源模组为650nm红外激光光栅模组;所述中央处理器为
dm6437视觉图像处理板,包含有四路模拟视频接口和通信接口,所述dm6437视觉图像处理板连接上位机。
12.优选地,所述输送带为输送皮带。
13.本发明技术方案的一种输送带物料流体积实时估测方法的有益效果是:使用的设备简单,设备要求低,成本低,计算方法简单。
14.本发明技术方案一种输送带物料流体积实时估测方法,对物料流体积实时监测装置,可以较为精准且动态的了解输送带上物料实时的体积分布(或乘上空积密度得到质量分布),当把这些数据传给后台上位机,则便于管理人员对于物料的运输状态,生产的调度管理起到参考依据作用。
附图说明
15.图1为本技术方案中结构光照射至未输送物料的输送带上示意图,
16.图2为本技术方案中结构光照射至输送带上输送有物料状态示意图,
17.图3为输送带输送物料状态下横截面示意图,
18.图4为结构光照射至输送带上输送有物料时测量点变化示意图,
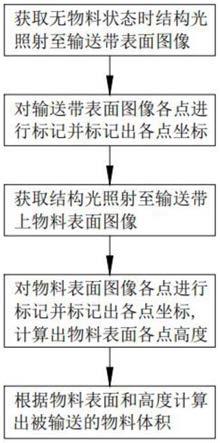
19.图5为本技术方案的输送带物料流体积实时估测方法的流程示意图。
具体实施方式
20.为便于本领域技术人员理解本发明技术方案,现结合说明书附图对本发明技术方案做进一步的说明。
21.本发明技术方案一种输送带物料流体积实时估测方法,采用到的硬件设备有结构光光源模组、ccd相机、中央处理器和上位机。
22.结构光光源模组,照射至输送带上设定的测量位置的输送带表面或被所述输送带输送且位于所述测量位置的物料流表面。
23.ccd相机,与结构光光源模组等高设置,且获取被所述结构光光源模组照射的测量位置的输送带表面图像或测量位置上被输送的物料流表面图像。
24.中央处理器,接收所述ccd相机传输过来的测量位置输送带表面图像信息和测量位置上被输送的物料流表面图像信息,并根据测量位置输送带图像信息和测量位置上被输送的物料流图形信息计算出测量位置输送的物料流的体积。
25.具体的估算方法为:
26.首先,所述结构光光源模组照射至测量位置的输送带表面,获得无畸变的初始测量位置图像,所述中央处理器在初始测量位置图像上标记出各初始点a1、a2、a3
……
an;同时,标注各点的坐标;同时,确定初始测量位置图像中心点n1,中心点n1与a1、a2、a3
……
an中一点重合。
27.然后,中央处理器接收测量位置上被输送的物料流表面图像,同时,在物料流图像表面标记出各测量点a1、a2、a3
……
an;测量点a0、a1、a2、a3
……
an与初始点a1、a2、a3
……
an一一对应,同时,标注各点的坐标。
28.再后,根据三角法测量原理计算出各个测量点a1、a2、a3
……
an的位置高度h1、h2、h3
……
hn,选定两两相邻的四个测量点作为计算物料流体积的最小单位块,计算出本最小
单位块的面积,结合本最小单位块物料的高度,计算出本最小单位块的物料流体积;对所有的最小单位块物料流体积求和,即获得测量位置的输送带表面输送的物料流体积。
29.本发明技术方案中,结构光光源模组为650nm红外激光光栅模组,包含3d建模结构光扫描光源,与ccd相机等高安装在输送带上方。ccd相机为高分辨率相机,将图像模拟信号转化为数字信号。输送带为输送皮带,在输送重物料时,向下凹陷,通过底部设置支撑,确保输送带在输送物料时呈基本固定的v形状,如图3所示状态。
30.利用上述各个设备对输送带上输送的物料体积进行估算过程为:
31.第一步,获得输送带上无物料时的结构光照射至测量位置的初始图像。
32.在输送带上选定一固定区间段作为测量位置,3d建模结构光扫描光源和ccd相机安装在测量位置中心点上方。通过调整3d建模结构光扫描光源焦距,在输送带上无物料时,使其照射至输送带上测量位置的图形呈规整的矩形网格状,如图1所示形态(图1中,虚线为输送带,实线网格即为3d建模结构光扫描光源在输送带上测量位置照射的光线,此时光线呈直线状态)。通过ccd相机对测量位置进行拍照,获得测量位置如图1所示的图形,标记为测量位置初始图像,并将测量位置初始图像的模拟信号转化为数字信号发送至中央处理器。中央处理器对测量位置初始图像中各小网格的顶点进行标记,并依据测量位置的宽度(与输送带宽度方向一致)和测量位置的长度(与输送带输送方向一致)计算出各点坐标。如图4所示,x1、x2
……
x8与y1、y2
……
y8组成的网格即为上述测量位置初始图像中的一小部分。根据输送带宽度和测量位置的宽度与长度,本方案中的3d建模结构光扫描光源发射出50*50线网格,也即上述测量位置初始图像应为x1、x2
……
x50与y1、y2
……
y50组成的网格,标记出初始测量位置图像上标记出各初始点a1、a2、a3
……
a2500。同时,标注各点的坐标。同时,确定初始测量位置图像中心点n1,中心点n1与a1、a2、a3
……
an中一点重合,假设中心点n1坐标为n1(x25,y25)。
33.如图4中,测量位置初始图像中的四个初始点ak、ak+1、as、as+1,本初始点ak、ak+1、as、as+1为初始点a1、a2、a3
……
a2500中的四个点。上述四个初始点的坐标为ak(x1,y7)、ak+1(x1,y8)、as(x2,y7)、as+1(x2,y8),按照上述规律标记出初始点a1、a2、a3
……
a2500的坐标。
34.第二步,在输送带输送物料时,获得测量位置实时输送的物料图像。
35.在输送带上有物料输送时,3d建模结构光扫描光源照射至物料表面,因物料边呈不平整状态,依据结构光方法测量原理:激光器投射的光束通过一柱面镜在空间中形成一窄的激光平面,当与物体表面相交时便在物体表面产生一亮的光条。该光条由于物体表面深度的变化以及可能的间隙而受到调制,表现在图像中为该光条发生了畸变和不连续,畸变的程度与深度成正比,不连续则显示了物体表面的物理间隙。则原3d建模结构光扫描光源在输送带成像的个点发生畸变,如图2所示,即结构光照射至物料表面,不在呈规整的矩形,其形成一个个不规整的四边形,且四边形的四个顶点位置高度不同。图2中,1为输送的物料,2为结构光在物料表面畸变后出现的网格,在网格下面具体输送的物料,为确保网格清晰,网格下部物料为画出。标记测量位置物料图像各点为测量点,具有测量点a1、a2、a3
……
a2500,上述测量点a1、a2、a3
……
a2500一一对应原初始点a1、a2、a3
……
a2500,获得测量点a1、a2、a3
……
a2500的坐标。如图4中,原初始点ak(x1,y7)、ak+1(x1,y8)、as(x2,y7)、as+1(x2,y8),经过在物料表面畸变后为ak(x1+δ1,y7+δ2)、ak+1(x1+δ3,y8+δ4)、
as(x2+δ5,y7+δ6)、as+1(x2+δ7,y8+δ8),其中δ1至δ8分别为测量点相对原初始点移动量、畸变量。
36.第三步,估算出测量位置物料表面面积。
37.在第二步的基础上,依据测量位置物料表面各点的坐标,计算出,物料表面的面积。选定两两相邻的四个测量点,作为测量位置面积计算的最小面积块。如图4所示,两两相邻的四个测量点ak(x1+δ1,y7+δ2)、ak+1(x1+δ3,y8+δ4)、as(x2+δ5,y7+δ6)、as+1(x2+δ7,y8+δ8),将四个测量点ak、ak+1、as、as+1围成的四边形近似视作矩形,其面积sk为ak与ak+1之间距离乘以ak、as之间距离,即:
[0038][0039]
即
[0040]
按照上述规律,将结构光在测量位置获得的物料表面图形的所有面积块均计算出面积,得到面积s1、s2、s3
……
s2500。上述sk为s1、s2、s3
……
s2500中的一个。
[0041]
第四步,因输送皮带输送过程为呈v型,各个初始点的位置高度不同,所以,确定测量位置初始图像中各初始点a1、a2、a3
……
a2500高度。
[0042]
如图3中所示,中心点n1的高度为0,初始点n1距离相机高度为h2,h2数据通过手动测量得出,为已知量。同时依据测量位置宽度和长度计算出各个初始点位置高度。如图3所示,初始点n2位置h1,初始点n2距离相机高度为h2-h1为,而初始点n2距离中心点n1的距离为l1,l1根据初始点n2的坐标计算得出。因初始点n2为a1、a2、a3
……
a2500中的一个点,假设初始点n2坐标为n2(x30,y35),则初始点n2距离中心点n1的距离为l1为:同理的,初始点n2畸变后的测量点n2的坐标为n2(x30+δn2,y35+δn2),测量点n2距离中心点n1的水平距离l2为依据图3,测量点n2相对初始点n2的高度计算方法为即
[0043]
第五步,估算出测量位置物料体积。
[0044]
由于结构光投影在物料上的网格较为密集,这里将物料近似看成由2500个不同高度和体积的立方体组成,在计算物料的整体体积时,则近似认为是这2500个不同体积的立方体之和。按照第三步计算得出的物料表面的面积和第四步计算得出的各个测量点的高度,计算出整体物料的体积。
[0045]
架设第四步中的测量点n2即为第三步中的测量点ak、ak+1、as、as+1中的一点。第四步中以经分别计算出了测量点ak、ak+1、as、as+1的高度,假设测量点n2即为测量点ak,若是测量ak、ak+1、as、as+1的高度相等或近似,则直接区测量点n2高度h3为测量点ak、ak+1、as、as+1围成的面积块的高度,若是测量点ak、ak+1、as、as+1四点高度相差较大,则ak、ak+1、as、as+1围成的面积块的高度即为ak、ak+1、as、as+1四点高度的均值。这里架设ak、ak+1、as、as+1四点高度相等或近似,直接区测量点n2的高度h3为ak、ak+1、as、as+1围成的面积块的高度。则将ak、ak+1、as、as+1围成的面积对应的物料体积视作ak、ak+1、as、as+1围成的面积对应的柱体面积vn2,则vn2-=sk*h3,即按照本方法,计算出测量位置物料的全部体积v
=v1+v2+v3
……
+v2500。
[0046]
本发明技术方案一种输送带物料流体积实时估测方法,对物料流体积实时监测装置,可以较为精准且动态的了解输送带上物料实时的体积分布(或乘上空积密度得到质量分布),当把这些数据传给后台上位机,则便于管理人员对于物料的运输状态,生产的调度管理起到参考依据作用。
[0047]
本发明技术方案在上面结合附图对发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性改进,或未经改进将发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1