一种炒菜机用搅拌桨的位置检测装置及检测方法与流程
1.本发明涉及炒菜机领域,具体涉及一种炒菜机用搅拌桨的位置检测装置及检测方法。
背景技术:
2.家用炒菜机针对不同的烹饪需求,一般有两种搅拌方式,一种是进行左右往复运动,另一种是进行360度旋转。比如烹饪豆腐时,由于豆腐质地易碎,那么就需要选择左右往复搅拌以避免搅拌时移动过高,幅度过大以造成豆腐掉落至锅底时破碎。
3.现有的家用炒菜机一般通过设置位置检测组件以实现搅拌桨的左右往复运动,但该检测组件结构复杂、成本高,且容易发生偏差,可靠性较低。
技术实现要素:
4.为了克服上述现有技术所述的缺陷,本发明提供一种炒菜机用搅拌桨的位置检测装置及检测方法,该位置检测装置结构简单,生产成本低,具有较大的推广性。
5.本发明为解决其问题所采用的技术方案是:
6.一种炒菜机用搅拌桨的位置检测装置,包括电机组件以及搅拌桨组件,其中:
7.所述搅拌桨组件包括搅拌叶以及设置在所述搅拌叶一侧且与所述电机组件的动力输出轴相传动连接的第一转轴,所述第一转轴上设有磁件,所述磁件与所述搅拌叶位于同一水平面上;
8.还包括设置在所述第一转轴左侧或右侧且与所述磁件相对应的磁性检测开关,所述磁性检测开关与所述电机组件的控制器信号连接。
9.本发明的位置检测装置,结构简单,当磁件移动并被左侧(或右侧) 的磁性检测开关所检测时,即可实现对左侧(或右侧)位置点的判断;随后将该左侧(或右侧)位置点作为起点,通过控制电机组件的旋转时间来实现对右侧(或左侧)位置点的判断。此外,该左侧(或右侧)位置点可作为每个旋转周期后进行重新校准的校准点,使得两侧的位置点不容易发生偏差,进而提高了两侧位置点的精准度。
10.进一步地,所述磁性检测开关检测到所述磁件时,所述控制器控制所述电机组件停止工作。
11.进一步地,还包括套设在所述第一转轴上的从动轮,所述磁件设置在所述从动轮上。
12.进一步地,还包括套设在所述电机组件动力输出轴上的传动轮,所述传动轮与所述从动轮耦合传动连接。
13.进一步地,所述传动轮的外侧面设有梅花状槽,所述从动轮上设有用于容纳所述传动轮的凹腔,所述凹腔内设有与所述梅花状槽相匹配的若干凸筋。
14.进一步地,所述梅花状槽朝向所述从动轮的端面上设有若干第一导向斜面,所述凸筋朝向所述传动轮的端面上设有相匹配的第二导向斜面。
15.由此,通过设置第一导向斜面和第二导向斜面,可方便梅花状槽与若干凸筋之间的安装配合。
16.进一步地,所述电机组件包括电机,所述电机包括马达以及变速箱,所述变速箱内设有传动机构,所述马达的动力输出轴与所述变速箱的动力输出轴之间通过所述传动机构传动连接,且呈90度设置;
17.所述传动轮套设在所述变速箱的动力输出轴上。
18.进一步地,所述传动机构为蜗轮蜗杆传动组件和/或齿轮组传动组件。
19.由此,采用蜗轮蜗杆传动组件和/或齿轮组传动组件进行动力传输,可大大提高动力传递的稳定性和可靠性。
20.进一步地,所述电机组件还包括与所述变速箱相连接的安装支架,所述安装支架上设有可供所述变速箱的动力输出轴穿过的通孔;所述磁性检测开关设置在所述安装支架上。
21.另外,本发明还提供一种炒菜机用搅拌桨的位置检测方法,包括以下步骤:
22.s1:在搅拌桨组件的从动轮上安装磁件,该磁件与搅拌叶位于同一水平面上;在电机组件的安装支架上安装与磁件相对应的磁性检测开关,该磁性检测开关位于从动轮的右侧(或左侧);
23.s2:电机驱动搅拌叶向右侧(或左侧)旋转,直到从动轮上的磁件被磁性检测开关所检测时,控制器控制电机停止工作,此时即可判断搅拌叶到达右侧(或左侧);
24.s3:当搅拌叶需要旋转至左侧(或右侧)时,则通过控制电机的旋转时间来判断其位置;若电机转速为每分钟r转时,搅拌叶旋转的角度为α度,则电机驱动搅拌叶旋转α度需要的时间为:220
×
(60/r
÷
360)=110/3r 秒,即控制器只需要控制电机旋转110/3r秒即可判断搅拌叶到达左侧(或右侧);
25.s4:重复步骤s2和s3直到炒菜作业结束。
26.综上所述,本发明的一种炒菜机的位置检测装置及检测方法,该位置检测装置结构简单,当磁件移动并被左侧(或右侧)的磁性检测开关所检测时,即可实现对左侧(或右侧)位置点的判断;随后将该左侧(或右侧) 位置点作为起点,通过控制电机的旋转时间来实现对右侧(或左侧)位置点的判断。此外,该左侧(或右侧)位置点可作为每个旋转周期后进行重新校准的校准点,使得两侧的位置点不容易发生偏差,进而提高了两侧位置点的精准度。
附图说明
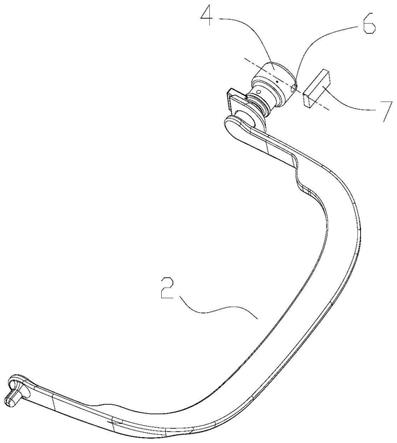
27.图1为本发明位置检测装置的结构示意图;
28.图2为本发明搅拌桨组件与磁性检测开关的爆炸示意图;
29.图3为图1隐藏掉安装支架后的结构示意图;
30.图4为本发明电机组件的结构示意图;
31.图5为本发明电机组件中变速箱的内部结构示意图;
32.图6为本发明搅拌桨组件的部分结构示意图;
33.图7为本发明传动轮的结构示意图;
34.图8为本发明传动轮另一视角的结构示意图;
35.图9为本发明从动轮的结构示意图;
36.图10为本发明从动轮另一视角的结构示意图。
37.其中,附图标记含义如下:
38.1、电机组件;11、马达;12、变速箱;121、第三安装孔;122、第二扁位;123、第一安装孔;13、多级传动机构;131、蜗杆;132、蜗轮;133、第一齿轮;134、第二齿轮;135、第三齿轮;136、第四齿轮;2、搅拌桨组件;21、搅拌叶;22、第一转轴;221、第四扁位;222、第二安装孔; 23、第二转轴;3、传动轮;31、梅花状槽;311、第一导向斜面;32、第一凹槽;321、第一扁位;33、第一通孔;4、从动轮;41、凹腔;42、凸筋;421、第二导向斜面;43、第二凹槽;431、第三扁位;432、第二通孔; 5、安装支架;51、凸壁;6、磁件;7、磁性检测开关。
具体实施方式
39.为了更好地理解和实施,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
40.在本发明的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
41.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本发明。
42.参阅图1-10,本发明提供了一种炒菜机用搅拌桨的位置检测装置,包括电机组件1以及搅拌桨组件2,该搅拌桨组件2与电机组件1耦合传动连接且相互垂直交错设置。在电机组件1的驱动下,可带动搅拌桨组件2围绕锅体8进行旋转以实现自动炒菜作业。
43.参阅图1和图4,该电机组件1包括电机,该电机包括马达11和变速箱12,该变速箱12内设有多级传动机构13,该马达11的动力输出轴与变速箱12的动力输出轴之间通过多级传动机构13传动连接,且该马达11的动力输出轴与变速箱12的动力输出轴之间呈90度设置。另外,该电机组件1还包括用于将电机固定在炒菜机的主机壳体内的安装支架5,该安装支架5上设有可供变速箱12的动力输出轴穿出的通孔,该通孔的外侧还环设有凸壁51;该变速箱12上还设有若干与安装支架5相连接的第三安装孔 121。
44.参阅图5,该多级传动机构13包括蜗轮蜗杆传动组件和齿轮组传动组件,该蜗轮蜗杆传动组件包括设置在马达11动力输出轴上的蜗杆131以及与该蜗杆131相啮合传动的蜗轮132,该蜗杆131和蜗轮132形成第一级传动;该齿轮组传动组件包括第一齿轮组和第二齿轮组,该第一齿轮组包括套设在蜗轮132输出轴上的第一齿轮133以及该第一齿轮133相啮合传动的第二齿轮134,该第一齿轮133和第二齿轮134形成第二级传动;该第二齿轮组包括套设在第二齿轮134输出轴上的第三齿轮135以及套设在变速箱12动力输出轴且与第三齿轮135相啮合传动的第四齿轮136,该第三齿轮135和第四齿轮136之间形成第三级传动。
45.参阅图6,该搅拌桨组件2包括搅拌叶21以及分别设置在搅拌叶21两侧的第一转轴22和第二转轴23,该变速箱12的动力输出轴与该第一转轴 22传动连接,该第二转轴23用于插入锅体的侧面安装孔内。该电机组件1 的动力输出轴、第一转轴22以及第二转轴23均同
轴设置,该搅拌叶21与电机组件1相互垂直交错设置。
46.在本实施例中,该搅拌叶21呈u形。
47.由此,该变速箱12的动力输出轴与第一转轴22和第二转轴23均同轴设置,从而提高了动力传输的稳定性和可靠性。
48.参阅图3以及图7-10,该位置检测装置还包括套设在变速箱12动力输出轴上的传动轮3以及套设在第一转轴22上的从动轮4,该传动轮3与从动轮4耦合传动连接,该从动轮4位于安装支架5的凸壁51内。具体的,该传动轮3的外侧面设有梅花状槽31,该从动轮4上设有用于容纳该传动轮3的凹腔41,该凹腔41内设有与梅花状槽31相装配的若干凸筋42。由此,将传动轮3插入到从动轮4的凹腔41内,并使传动轮3上的梅花状槽 31与从动轮4上的若干凸筋42相配合,即可实现两者的耦合连接。
49.另外,该梅花状槽31朝向从动轮4的端面上设有若干第一导向斜面311,该凸筋42朝向传动轮3的端面上设有相匹配的第二导向斜面421。由此,通过设置第一导向斜面311和第二导向斜面421,可方便梅花状槽31插入到若干凸筋42内。
50.参阅图6-8,该传动轮3上设有用于套设在变速箱12动力输出轴上的第一凹槽32,该第一凹槽32上设有第一扁位321;该变速箱12动力输出轴的侧面设有与该第一扁位321相配合的第二扁位122。另外,该传动轮3 上还设有连通该第一凹槽32的第一通孔33,该变速箱12动力输出轴的端面设有与第一通孔33相配合的第一安装孔123。
51.在本实施例中,该第一安装孔123为螺孔。由此,采用螺丝穿过第一通孔33后并与第一安装孔123螺纹连接后,即可将传动轮3固定在变速箱 12的动力输出轴上。
52.参阅图9-10,该从动轮4上设有用于套设在第一转轴22上的第二凹槽 43,该第二凹槽43上设有第三扁位431,该第一转轴22的侧面设有与第三扁位431相配合的第四扁位221。另外,该第二凹槽43的侧面还设有第二通孔432,该第一转轴22上设有与该第二通孔432相配合的第二安装孔222。
53.在本实施例中,该第二安装孔222为通孔。由此,使用销钉分别穿过该第二通孔432以及第二安装孔222即可实现将从动轮4固定在第一转轴 22上。
54.另外,参阅图1-2,该从动轮4上设有磁件6,该磁件6与搅拌叶21 位于同一水平面上;该安装支架5上设有与磁件6相对应且位于搅拌叶21 一侧的磁性检测开关7,该磁性检测开关7与电机组件1的控制器信号连接。当磁性检测开关7检测到磁件6时,该控制器控制电机组件1停止工作,从而实现了搅拌叶21位置的固定。
55.在本实施例中,该磁件6为磁铁,该磁性检测开关7为霍尔感应开关;该磁性检测开关7位于搅拌叶21的右侧。当然,在其他实施例中,该磁性检测开关7也可以设置在搅拌叶21的左侧,此处不受限制。
56.另外,本发明还提供一种炒菜机用搅拌桨1的位置检测方法,包括以下步骤:
57.s1:在搅拌桨组件2的从动轮4上安装磁铁,该磁铁与搅拌叶21位于同一水平面上;在电机组件1的安装支架5上安装与磁铁相对应的霍尔感应开关,该霍尔感应开关位于从动轮4的右侧;
58.s2:电机驱动搅拌叶21向右侧旋转,直到从动轮4上的磁铁被霍尔感应开关所检测时,控制器控制电机停止工作,此时即可判断搅拌叶21到达右侧;
59.s3:当搅拌叶21需要旋转至左侧时,则通过控制电机的旋转时间来判断其位置;若
电机转速为每分钟r转时,搅拌叶21旋转的角度为α度,则电机驱动搅拌叶旋转α度需要的时间为:220
×
(60/r
÷
360)=110/3r秒,即控制器只需要控制电机旋转110/3r秒即可判断搅拌叶21到达左侧;
60.s4:重复步骤s2和s3直到炒菜作业结束。
61.其中,该右侧的位置点也作为每个旋转周期后进行重新校准的校准点,从而使得两侧的位置点不容易发生偏差,提高了两侧位置点的精准度。
62.另外,当霍尔感应开关位设置在从动轮4的左侧时,其检测方法一样,此处不再赘述。
63.综上所述,本发明的一种炒菜机的位置检测装置及检测方法,该位置检测装置结构简单,当磁件6移动并被左侧(或右侧)的磁性检测开关7 所检测时,即可实现对左侧(或右侧)位置点的判断;随后将该左侧(或右侧)位置点作为起点,通过控制电机的旋转时间来实现对右侧(或左侧) 位置点的判断。此外,该左侧(或右侧)位置点可作为每个旋转周期后进行重新校准的校准点,从而使得两侧的位置点不容易发生偏差,进而提高了两侧位置点的精准度。
64.本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1