磁阻角度传感器系统和包括磁阻角度传感器系统的车辆的制作方法
1.示例涉及磁阻角度传感器系统和包括磁阻角度传感器系统的车辆。
背景技术:
2.磁阻(mr)角度传感器系统具有广泛的可能应用。例如,mr角度传感器系统用于汽车应用。它们的使用领域范围从具有最高功能安全要求的转向角应用到用于雨刮器、泵和致动器的电机以及一般的电动机。它们还可以用于如机器人或万向节等工业和消费类应用。
3.mr角度传感器系统基于集成磁阻技术。磁阻是材料在外加磁场中改变其电阻值的趋势。有多种效应可以称为磁阻,例如amr,各向异性磁阻;gmr,巨磁阻;以及隧道磁阻tmr。mr角度传感器系统测量旋转部件的旋转角度。mr角度传感器系统包括mr传感器, mr传感器通过测量由磁体生成的磁场的正弦和余弦分量来检测其上附接有磁体的旋转部件的旋转角度。在磁体附接到轴端eos配置的旋转部件时测量磁阻通常用于检测旋转角度。在eos配置中,磁体附接到旋转部件的轴端并且mr传感器布置在旋转部件的轴端附近。在某些应用中,例如,由于所使用的部件的布置方面的几何限制,无法使用eos配置。另一种可能性是测量轴外oos配置的磁阻。在 oos配置中,磁体可以布置在旋转部件的周围表面处并且mr传感器布置在磁体附近。由于设置不再对称,因此在该oos配置中进行测量可能会导致测量精度降低。虽然某些应用可能出于几何原因而需要 oos配置,但常规oos配置的精度降低可能会禁止使用oos配置。
技术实现要素:
4.因此,需要提供一种更准确的方法来测量oos配置的旋转部件的旋转角度,这适用于很多应用。
5.这种需要由独立权利要求的主题解决。
6.一个示例涉及一种用于测量轴外oos配置的旋转部件的旋转角度的磁阻mr角度传感器系统。mr角度传感器系统包括被附接到旋转部件的磁体、以及磁阻传感器。mr传感器的敏感平面在偏移方向上相对于磁体的中心以一定偏移定位。通过将mr传感器的敏感平面定位成在偏移方向上相对于磁体的中心有一定偏移,可以提高旋转部件的旋转角度的测量精度。该偏移可以确定用于确定旋转角度的第一方向和第二方向上的磁场分量的关系。由于该偏移,第一方向和第二方向上的磁场分量之间的差异可以变小,从而可以高精度地确定旋转角度。
附图说明
7.以下将仅通过示例并且参考附图来描述系统的一些示例,在附图中
8.图1a示出了轴端配置的常规磁阻mr角度传感器系统以及第一方向和第二方向上的磁场分量对旋转角度的依赖性;
9.图1b示出了轴外oos配置的常规mr角度传感器系统以及第一方向和第二方向上的磁场分量对旋转角度的依赖性;
10.图1c示出了其中mr传感器和磁体平行布置的oos配置的常规 mr角度传感器系统以及第一方向和第二方向上的磁场分量对旋转角度的依赖性;
11.图1d示出了在常规系统中所测量的旋转角度的误差对机械角度的依赖性;
12.图2a示出了根据本公开的第一实施例的oos配置的mr角度传感器系统以及在第一方向、第二方向和第三方向上的磁场分量对旋转角度的依赖性;
13.图2b示出了本公开的实施例中的第一方向和第二方向上的磁场分量的三维表示和磁场分量的二维表示;
14.图2c示出了针对不同偏移的磁场分量的三维表示和磁场分量的二维表示;
15.图2d示出了第一方向和第二方向上的磁场分量的幅度之比对偏移的依赖性;
16.图3a示出了根据本公开的第二实施例的oos配置的mr角度传感器系统和根据第二实施例的mr角度传感器系统的磁体;
17.图3b示出了第一方向和第二方向上的磁场分量的幅度之比对偏移的依赖性以及磁场分量对旋转角度的依赖性;
18.图3c示出了第一方向和第二方向上的磁场分量的三维表示和磁场分量的二维表示;
19.图3d示出了oos配置的磁角度对机械角度的依赖性和oos配置的磁角度误差对机械角度的依赖性;以及
20.图4示出了根据本公开的第三实施例的线控换挡sbw应用中的包括oos配置的mr角度传感器系统的车辆的一部分。
具体实施方式
21.现在参考附图更详细地描述一些示例。然而,其他可能的示例不限于详细描述的这些实施例的特征。其他示例可以包括特征的修改以及特征的等同物和备选。此外,本文中用于描述某些示例的术语不应当限制其他可能的示例。
22.在附图的整个描述中,相同或相似的附图标记指代相同或相似的元素和/或特征,该元素和/或特征可以以相同或以修改的形式实现同时提供相同或相似的功能。图中的线条、层和/或区域的厚度也可能被夸大以进行澄清。
23.当两个元素a和b使用“或”组合时,这应当理解为公开所有可能的组合,即只有a、只有b以及a和b,除非在个别情况下另有明确定义。作为相同组合的备选措辞,可以使用“a和b中的至少一个”或“a和/或b”。这同样适用于两个以上元素的组合。
24.如果使用单数形式,诸如“一个(a)”、“一个(an)”和“该 (the)”,并且未明确或隐含地将仅使用单个元素定义为强制性的,则其他示例也可以使用多个元素来实现相同的功能。如果一个功能在下面被描述为使用多个元素来实现,则其他示例可以使用单个元素或单个处理实体来实现相同的功能。还应当理解,术语“包括(include)”、“包括(including)”、“包括(comprises)”和/或“包括(comprising)”在使用时描述特定特征、整体、步骤、操作、过程、元素、部件和/ 或其组的存在,但不排除一个或多个其他特征、整体、步骤、操作、过程、元素、部件和/或其组的存在或添加。
25.图1a在左图中示出了轴端(end of shaft)eos配置的常规磁阻角度传感器系统100a。mr角度传感器系统100a包括可以是盘形的磁体101a。磁体101a被附接到旋转部件102a。旋转部件102a可以具有圆柱形状。旋转部件102a可以具有沿其纵向方向延伸的轴,该轴平行于旋转部件102a的旋转轴线r。在eos配置中,磁体101a被布置在旋转部件102a的轴的端部处。mr角度传感器系统100a还包括用于测量旋转部件102a的旋转角度的磁阻mr传感器103a。mr传感器对至少第一方向x上的磁场分量bx和垂直于第一方向x的至少第二方向y上的磁场分量by敏感。mr传感器103a的敏感平面由第一方向x和第二方向y形成。旋转轴线r可以垂直于敏感平面。mr传感器的敏感平面可以以eos配置位于旋转部件102a的轴的端部下方,其中磁体101a附接到旋转部件102a。
26.图1a在右图中示出了第一方向x上的磁场分量bx和第二方向y 上的磁场分量by对旋转角度ra的依赖性。图1a的右图所示的第一方向x上的磁场分量bx和第二方向y上的磁场分量by是用图1a的左图所示的eos配置的常规mr角度传感器系统100a测量的。第一方向x和第二方向y可以垂直于第三方向z,第三方向z可以平行于旋转部件102a的轴和旋转轴线r。从图1a的右图中可以看出,第一方向x上的磁场分量bx的幅度至少基本上对应于第二方向y上的磁场分量by的幅度。
27.使用校准方法来计算旋转角度ra。校准方法使用由mr传感器 103a测量的磁场分量bx、by来计算旋转角度ra。影响角度计算的参数是第一方向x上的磁场分量bx和第二方向y上的磁场分量by的偏移、幅度以及非正交性。偏移是测量值(在这种情况下是第一方向上的磁场分量bx和第二方向上的磁场分量by)的常数、加法或减法量或系统误差。非正交性是例如具有余弦信号的第一方向x上的磁场分量与例如具有正弦信号的第二方向y上的磁场分量的相位差。校准方法可以包括偏移校正、幅度归一化和非正交性的校正。偏移校正使第一方向x的磁场分量bx和第二方向y的磁场分量by的幅度相对于纵坐标偏移上述偏移的量。幅度归一化校正幅度,使得第一方向x 的磁场分量bx的幅度和第二方向y的磁场分量by的幅度至少具有基本相同的量。非正交性的校正将例如具有余弦信号的第一方向x上的磁场分量bx和例如具有正弦信号的第二方向y上的磁场分量by 的相移校正到至少基本上90
°
。
28.由于eos配置的磁场分量bx、by的大小相等,使用校准方法测量的旋转部件102a的旋转角度ra可能存在低误差,从而导致在eos 配置中的测量具有高精度。不幸的是,并非所有应用都允许mr角度传感器系统100a测量eos配置的旋转角度。
29.图1b在左图中示出了oos配置的常规mr角度传感器系统100b。该oos配置的磁体101b与图1a的左图所示的mr角度传感器系统 100a中的磁体101a的不同之处在于,磁体101b可以是环形的并且被布置在旋转部件102b的周围表面处。mr传感器103b被布置在磁体 101b附近。
30.在图1b的右图中,示出了第一方向x上的磁场分量bx和第二方向y上的磁场分量by对旋转部件102b的旋转角度ra的依赖性。如图1b的右图所示,第一方向x上的磁场分量bx和第二方向y上的磁场分量by是用oos配置的常规mr角度传感器系统100b测量的。与图1a的右图中的eos配置相比,图1b的右图中的oos配置示出,第一方向x上的磁场分量bx的幅度明显不同于第二方向y上的磁场分量by的幅度。在该oos配置中,第一方向x上的磁场分量bx和第二方向y上的磁场分量by的幅度中的一个幅度可以变得小于另一个幅度。
31.图1c在左图中示出了oos配置的另一常规mr角度传感器系统 100c。图1c的左图中
所示的常规mr角度传感器系统100c与图1b 的左图中所示的常规mr角度传感器系统100b的不同之处在于,mr 传感器103c的敏感平面以及pcb、印刷电路板平行于磁体101c布置。在磁体101c与mr传感器103c之间存在用于旋转部件102c的轴旋转的气隙。除此之外,图1c的左图中所示的常规mr角度传感器系统100c至少基本上对应于图1b的左图中所示的常规mr角度传感器系统100b。
32.在图1c的右图中,示出了第一方向x上的磁场分量bx和第二方向y上的磁场分量by对旋转部件102c的旋转角度ra的依赖性。在图1c的左图所示的oos配置中,第一方向x上的磁场分量by和第二方向y上的磁场分量by是用常规mr角度传感器系统100c测量的。与图1a的右图中的eos配置相反,图1c的右图中的oos配置示出,第一方向x上的磁场分量bx的幅度明显不同于第二方向y上的磁场分量by的幅度,很像图1b的实现。
33.eos配置中用于计算旋转角度ra的校准方法在oos配置中不能正常工作,因为磁场分量bx、by中的一个在oos配置中可能变得小于另一个。如果磁场分量bx、by的幅度具有不相等的大小,则在校准方法中使用的幅度归一化可能导致所测量的旋转角度ra的高的误差。由于磁场分量bx,by的幅度的这种关系,在该oos配置中,可能会经历旋转角度ra的测量的低精度。
34.图1d示出了oos配置中的旋转角度ra的测量的低精度。图1d 在左上图中示出了磁场分量bx、by和bz对用图1c所示的常规mr 角度传感器系统100c测量的旋转角度ra的依赖性。磁场分量bx、 by和bz的幅度彼此显著不同。通常,mr角度传感器系统在饱和磁场区域中操作。虽然常规的mr传感器校准方法可以补偿mr传感器输出、偏移和正交性的幅度,但如果磁场分量bx、by和bz的幅度具有不相等大小,则常规的幅度归一化可能会导致所测量的旋转角度的误差较高,因为磁场传感器在饱和磁场区域中操作。因此,常规校准方法可能无法在图1c所示的mr角度传感器系统中正常工作,因为磁场分量bx和磁场分量by的传感器输出可能与在饱和区域中的所施加的b场幅度不成比例。
35.图1d的左下图示出了取决于机械角度的图1c所示的常规mr角度传感器系统100c的这种失真的mr传感器输出tmrx、tmry。 mr传感器输出tmrx、tmry在饱和区域不均等地失真,导致磁场分量bx、by的幅度不等,从而导致所测量的旋转角度ra的大的误差。
36.在图1d的右上图中,示出了当用图1c的常规mr角度传感器系统100c测量时旋转部件102c的磁角度对机械角度的依赖性。图1c 的左图中的虚线104示出了所测量的磁角度对旋转部件的机械角度的理论依赖性,当然,它是线性的。磁角度或旋转角度定义了旋转部件 102c的角度,该角度由mr角度传感器系统100c测量。机械角度定义了旋转部件102c的机械测量角度。实线105示出了使用常规mr 角度传感器系统100c测量的值。虚线104与实线105之间的差异是所测量的旋转角度的误差,该误差很大并且主要由如图1d的左下图所示的失真的传感器输出引起。
37.图1d的右下图示出了测量旋转角度的误差e对旋转部件的机械角度的依赖性。由于左下图中的失真信号的形状,针对机械角度45
°
、 135
°
、225
°
和315
°
的误差e最大。
38.总之,常规的mr传感器系统100b、100c在测量oos配置的旋转角度方面具有缺点。因此,需要一种允许在oos配置中实现高测量精度的mr角度传感器系统。
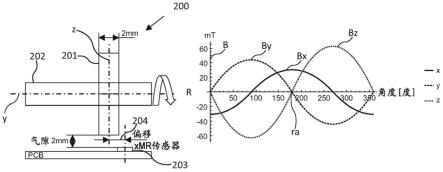
39.这种需要由图2a所示的mr角度传感器系统200满足。图2a示出了根据本公开的第一实施例的用于测量oos配置的旋转部件202 的旋转角度的mr角度传感器系统200。旋转部
件202例如可以是圆柱状的轴。备选地,旋转部件202可以具有给定应用所需要的任何形状。例如,旋转部件202可以具有长方体、圆锥体、截锥体、棱柱体、球体或棱锥体形状。在所示实施例中,旋转部件202具有旋转轴线r,旋转轴线r平行于旋转部件202的纵向方向。
40.mr角度传感器系统200包括附接到旋转部件202的磁体201。磁体201具有环形形状。在备选实施例中,磁体201可以具有给定应用所需要的任何形状。例如,磁体201可以具有圆环或空心圆柱形状。磁体201布置在旋转部件202的外表面处。磁体201可以具有2mm 的深度。磁体201的磁极可以被配置为例如围绕旋转轴线可枢转。磁体201的磁极之间的方向可以基本上垂直于旋转轴线r。由此,可以高精度地测量旋转角度。
41.mr角度传感器系统200还包括mr传感器203。mr传感器203 可以是各向异性磁阻传感器、巨磁阻传感器或隧道磁阻传感器中的一种。mr传感器203被配置为测量第一方向x和垂直于第一方向x的第二方向y上的磁场分量。第一方向x和第二方向y形成mr传感器 203的敏感平面。mr传感器203的敏感平面在偏移方向上相对于磁体201的中心以偏移204定位。以这种具有非零偏移的方式定位mr 传感器203可以导致在第一方向x和第二方向y上的磁场分量的幅度相等。因此,如果第一方向x和第二方向y的磁场分量的幅度大小相等,则校准方法中的幅度归一化不是必需的,并且可以导致测量的旋转角度的低误差低。因此,可以实现校准方法的较高精度并且因此实现oos配置的测量旋转角度的较高精度。
42.偏移方向平行于图2a中mr角度传感器系统200中的旋转部件 202的旋转轴线r。备选地,偏移方向可以垂直于旋转部件202的旋转轴线r。在两种情况下,mr传感器203都能够测量第一方向x上的磁场分量bx和第二方向y上的磁场分量by的幅度。在这些情况下,可以提供mr传感器203相对于磁体201的布置,该布置可以允许以高精度可靠地测量旋转部件202的旋转角度。
43.第一方向x和第二方向y可以垂直于磁体201的磁极之间的方向。备选地,第一方向x或第二方向y可以平行于磁体201的磁极之间的方向。这些情况可以提供用于定义mr传感器203相对于磁体201的敏感平面以高精度地测量旋转角度的选项。
44.在mr传感器203与磁体201之间可以是存在于垂直于偏移方向的方向上的气隙。气隙可以是例如至多1mm、至多2mm、至多4mm、至多5mm、至多7mm或至多10mm。具有这些尺寸的气隙允许精确测量第一方向x和第二方向y上的磁场分量。
45.mr角度传感器系统200还可以包括印刷电路板pcb。mr传感器203可以被布置在pcb上。
46.mr角度传感器系统200还可以包括电路装置,该电路装置被配置为接收关于由mr传感器203测量的磁场分量的信息并且基于关于所测量的磁场分量的该信息来确定磁体的方向。该电路装置可以包括处理电路。处理电路可以被配置为确定由于第一方向x和第二方向y 上的磁场分量的旋转角度。这可以使得能够高精度地测量旋转角度。mr传感器101c、102c、103c可以实现为单个芯片,该单个芯片被配置为基于第一方向x上的磁场分量bx和第二方向y上的磁场分量by 确定旋转角度。因此,为从所测量的场分量中导出角度而执行的计算在包括磁场传感器的芯片内执行。
47.备选地,旋转角度可以由单独的电路或芯片确定。这种单独的电路可以包括用于从mr传感器101c、102c、103c接收第一方向x上的磁场分量bx和第二方向y上的磁场分量by的测量幅度的接口。单独的电路可以经由接口连接到mr传感器101c、102c、103c。此外, mr
传感器101c、102c、103c可以被配置为根据第一方向x上的磁场分量bx和第二方向y上的磁场分量by的测量幅度来确定旋转角度。
48.图2a中的右图、图2b、2c和2d的图示出了利用根据图2a的左图中所示的第一实施例的mr角度传感器系统200而测量的磁场分量 bx、by、bz。
49.图2a在右图中示出了第一方向x上的磁场分量bx、第二方向y 上的磁场分量by和第三方向z上的磁场分量bz对旋转角度ra的依赖性。如图2a的左图所示的mr传感器203与磁体201中心的非零偏移204可以在第一方向x上生成非零磁场分量bx,在第二方向y 上生成磁场分量by,并且在第三方向z上生成磁场分量bz。因此,选择mr传感器203与磁体201中心的非零偏移204,目的是使第一方向x上的磁场分量bx和第二方向y上的磁场分量by具有至少基本相等大小。因此,可以获取更高的测量旋转角度精度。
50.图2b的左图在三维表示中示出了与图2a的右图相同的部件。图2b的左图示出了第一方向x、第二方向y和第三方向z上的磁场分量。这些磁场分量在这个三维表示中可以形成椭圆形轨迹。另外,第一方向x和第二方向y上的磁场分量的二维轨迹如图2b的左图所示。该轨迹可以具有倾斜的椭圆形状。第一方向x、第二方向y 和第三方向z上的磁场分量的三维轨迹使倾斜椭圆指代由第一方向x和第二方向y形成的敏感平面内的磁场分量在磁体201完全旋转时具有非零偏移204。
51.图2b示出了磁场分量bx、by、bz的另一种表示,其用于能够容易并且可靠地选择mr传感器203的非零偏移204,使得磁场分量 bx、by具有至少基本相等大小。图2b在右图中示出了图2b的左图中所示的倾斜椭圆形轨迹的俯视图。椭圆形轨迹在第一方向x和第二方向y上的磁场分量的二维表示中示出。当磁体201在非零偏移 204的情况下具有完全旋转时,测量图2b中的第一方向x和第二方向 y上的磁场分量的二维轨迹以及第一方向x、第二方向y和第三方向z上的磁场分量的三维轨迹
52.图2c示出了不同偏移204的磁场分量bx、by、bz,以实现磁场分量bx、by具有至少基本相等大小这一目标。
53.图2c在上部图示中示出了对于不同偏移在第一方向x、第二方向 y和第三方向z上的磁场分量的三维表示图2c中的上部六个图对应于图2b的左图中的表示。
54.图2c在下部示出了对于不同偏移204在第一方向x和第二方向y 上的磁场分量的二维表示图2c在下部示出了对于不同偏移204 到第一方向x和第二方向y上的磁场分量的mr传感器203的敏感平面中的第一方向x、第二方向y和第三方向z上的磁场分量的投影椭圆体图2c中的下面的九个图对应于图2b的右图的表示。椭圆形轨迹的倾斜量可以由偏移204控制。因此,磁场分量的轨迹可以是圆形,而不是通过具有适当偏移204而确
定形状的椭圆形,如下图所示2c所示。针对具有磁场分量的圆形轨迹的偏移204,实现磁场分量bx、by具有至少基本相等大小这一目标。偏移204为1mm 的磁场分量的轨迹是圆。因此,该圆形轨迹导致oos配置中旋转角度ra的高测量精度。
55.图2d示出了另一表示,其使得用户能够选择满足磁场分量bx、 by具有至少基本相等大小这一条件的偏移204。图2d在左图中示出了第一方向x和第二方向y上的磁场分量的幅度的比率dx/dy对偏移 204的依赖性。在该图中,满足第一方向x上的磁场分量的幅度至少基本上对应于第二方向y上的磁场分量的幅度这一条件的偏移204标记为10。如果dx/dy至少基本为1,则该条件满足。该偏移204可以具有例如0.91mm的值。mr传感器203的敏感平面在偏移方向上以该偏移204相对于磁体201的中心定位。mr传感器203以偏移204 相对于磁体201的这种布置使得可以像使用现有典型校准方法在eos 配置中那样测量旋转部件202的旋转角度ra同时保持高精度。使第一方向x和第二方向y上的磁场分量的幅度之比至少基本上为1的偏移值始终存在。mr传感器203要求高精度应用的幅度之比满足这个条件。
56.图2d在右图中示出了第一方向x和第二方向y上的磁场分量的二维表示图2d的右图中的表示对应于图2b的左图中的表示和图2c的下半部分的九个图。图2d的右图示出了在偏移204处第一方向x上的磁场分量对第二方向y上的磁场分量的依赖性,其在图2d 的左图中标记并且满足第一方向x上的磁场分量的幅度至少基本上对应于第二方向y上的磁场分量的幅度这一条件。在这个偏移处,图2d 的右图具有圆形形状。
57.因此,在oos配置中选择合适的偏移对于实现所测量的旋转角度ra的高精度很重要。在oos配置中,可以应用mr传感器203与磁体201之间的非零偏移以在第一方向x方向和第二方向y上感应非零磁场分量。mr传感器203相对于磁体201以非零偏移放置,这使得在第一方向x和第二方向y上的磁场分量的幅度之比对于高精度应用至少基本上等于1。
58.备选地,可以选择偏移使得第一方向x上的磁场分量的幅度与第二方向y上的磁场分量的幅度之比在mr传感器203的位置处在以下范围中的一个范围内:0.85至1.15;0.9至1.1;或0.95至1.05。在这种情况下,可以实现mr传感器203的高测量精度。映射校准方法可以应用非理想偏移,该偏移可能不会使第一方向x和第二方向y上的磁场分量的幅度之比为1。但是,它也必须具有非零偏移。
59.结合上文或下文描述的实施例提及更多细节和方面。图2a的左图所示的示例可以包括一个或多个可选的附加特征。
60.图3a在左图中示出了用于oos转子位置感测应用的根据本公开的第二实施例的oos配置的mr角度传感器系统300。转子位置感测是一种用于精确测量转子位置的系统。根据第二实施例的mr角度传感器系统300与根据图2a的左图所示的第一实施例的mr角度传感器系统200的不同之处在于,磁体301是环形磁体301,环形磁体301 如图3a的右图所示为环形。因此,根据第二实施例的mr角度传感器系统300被配置用于转子位置感测。环形磁体301可以具有5mm 的内径和/或10mm的外径。磁体301可以具有1000mt的磁通密度。除此之外,根据第二实施例的mr角度传感器系统300对应于根据第一实施例的mr角度传感器系统200。
61.图3b、3c和3d示出了如何在该mr角度传感器系统300中为 oos转子位置感测选择
合适的偏移。图3b在左图中示出了使用根据第二实施例的mr角度传感器系统300测量的磁场分量bx、by的幅度之比dx/dy对偏移304的依赖性。在该图中,满足第一方向x上的磁场分量bx的幅度至少基本上对应于第二方向y上的磁场分量by 的幅度这一条件的偏移被标记为10。如果dx/dy至少基本上为1,则该条件满足。该偏移304可以具有例如0.91mm的值。
62.图3b在右图中示出了使用根据第二实施例的mr角度传感器系统300测量的第一方向x、第二方向y和第三方向z上的磁场分量对旋转角度的依赖性。如图3b的右图所示,第一方向x上的磁场分量 bx的幅度至少基本上对应于第二方向y上的磁场分量by的幅度。因此,所选择的偏移实现了磁场分量bx、by具有至少基本相等大小这一目标。这导致使用校准方法的oos转子位置感测中旋转角度ra的高测量精度。
63.图3c在左图中示出了使用根据第二实施例的mr角度传感器系统300测量的第一方向x、第二方向y和第三方向z上的磁场分量的三维表示。磁场分量在三个维度上的轨迹是椭圆形的,如图3c 的左图所示。在图3c的左图中,还示出了磁场分量在第一方向x方向和第二方向y上的轨迹其为圆形。该轨迹也在图3c的右图中的平面图中以二维表示示出。图3c的右图示出了使用根据第二实施例的mr角度传感器系统300测量的第一方向x和第二方向y上的磁场分量其为圆形。该圆形轨迹示出,磁场分量bx、by具有至少基本相等大小,从而导致oos转子位置感测中的旋转角度ra 的高测量精度。
64.图3d示出了在oos转子位置感测中具有最佳偏移304的测量旋转角度。最佳偏移304实现了磁场分量bx、by具有至少基本相等大小这一目标。图3d在左图中示出了在oos配置中磁角度或旋转角度对机械角度20的依赖性。磁角度使用根据第二实施例的mr角度传感器系统300来测量。如图3d的左图所示,磁角度与机械角度20之间的依赖性是线性的并且没有偏移。因此,使用该偏移304可以实现适当的校准。
65.图3d在右图中示出了使用根据第二实施例的oos配置的mr角度传感器系统300测量的磁角度30的误差对机械角度的依赖性。从图3d的右图可以看出,磁角度误差对机械角度30的依赖性是具有最优偏移304的多项式。因此,根据该模拟,仅通过进行适当的偏移304 定位,mr传感器303可以在oos转子位置感测中实现高精度旋转角度测量。
66.结合上文或下文描述的实施例提及更多细节和方面。图3a的左图所示的示例可以包括一个或多个可选的附加特征。
67.图4示出了根据本公开的第三实施例的线控换档sbw应用中的车辆的包括oos配置的mr角度传感器系统400的一部分。线控换档是一种系统,通过该系统,可以通过电子控制来改变汽车中的传动模式,而变速杆与变速箱之间没有任何机械连接。这可以消除容纳换档器与变速器之间的机械联动装置所需要的布线空间,并且可以通过按下按钮或通过旋钮提供轻松的换档。消除这种连接可以消除来自驾驶员选择档位的任何换档工作。根据第三实施例的mr角度传感器系统400与根据第一和第二实施例的mr角度传感器系统200、300的不同之处在于,它被配置用于sbw应用。除此之外,根据第三实施例的mr角度传感器系统400还包括形成旋转部件402的旋转轴。旋转轴可以是凸轮轴、曲轴、转向轴或人类接口控制器的轴中的一种。因此,可以提供适用于不同应用的不同旋转轴。磁体401可以是盘形的并且
被布置在旋转轴402的端部处。旋转轴的旋转轴线r可以平行于旋转轴的纵向方向。除此之外,根据第三实施例的mr角度传感器系统400对应于根据第一实施例的mr角度传感器系统200。
68.此外,该mr角度传感器系统400需要偏移以实现磁场分量bx、 by具有至少基本相等大小这一目标。这导致在oos sbw使用校准方法对旋转角度ra的高测量精度。
69.结合上文或下文描述的实施例提及更多细节和方面。图4所示的示例可以包括一个或多个可选的附加特征。
70.与先前示例中的特定一个相关的方面和特征还可以与一个或多个其他示例组合以替换该另一示例的相同或相似特征或另外地将这些特征引入到另一示例中。
71.所附权利要求特此并入详细说明中,其中每项权利要求可以独立作为单独的示例。还应当注意,虽然在权利要求中从属权利要求是指与一个或多个其他权利要求的特定组合,但其他示例也可以包括从属权利要求与任何其他从属或独立权利要求的主题的组合。这样的组合在此明确提出,除非在个别情况下声明不打算进行特定组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1