具有增强的抗系统干扰性的声学障碍物检测的制作方法
1.本公开一般而言涉及障碍物的声学传感器检测,并且更特别地,涉及具有增强的抗系统干扰性的声学检测器和方法。
背景技术:
2.现代机动车配备有数量惊人且种类繁多的传感器。例如,汽车现在通常配备有超声波传感器阵列以监测汽车与附近任何人、宠物、车辆或障碍物之间的距离。由于环境“噪声”和安全考虑,可能会要求每个传感器在汽车运动时提供每秒数十次测量。重要的是,此类传感器阵列即使在以复杂方式变化的环境中也要可靠运行。看似小的差异,诸如路缘的存在与否,或者甚至铺砌和砂砾表面之间的差异,都可以显著改变杆、护柱或其它细长障碍物的特性反射。
3.当此类传感器遇到的噪声采用系统干扰的形式(即具有可以在每个测量周期中重复出现的重复分量的噪声)时,它可能导致错误的障碍物检测或实际障碍物的模糊。示例包括:气动噪声,诸如源自环境中其它汽车(诸如卡车)的振动;源自其它超声波传感器(诸如其它汽车的泊车辅助传感器、停车场占位检测器和交通灯控制系统)的超声波脉冲;以及来自其它传感器或测量通道的串扰。现有的传感器似乎不能提供对这种系统干扰的足够的免疫力。
技术实现要素:
4.因而,本文公开了至少部分解决上述问题的说明性传感器控制器、传感器、感测系统和感测方法。
5.根据本公开的一个方面,提供了一种用于声换能器的控制器,其特征在于,控制器包括:发送器,用于驱动声换能器以生成一系列的声脉冲串(bursts);接收器,耦合到声换能器以感测对所述系列中每个声脉冲串的响应;以及处理电路,用于部分地通过确定响应中的一个响应与响应中的另一个响应的至少一部分之间的差来从所述响应导出输出数据。
6.在一个实施例中,用于声换能器的控制器的特征在于,响应中的所述一个响应和响应中的所述另一个响应是对所述系列中的相邻声脉冲串的响应。
7.在一个实施例中,用于声换能器的控制器的特征在于,响应中的所述一个响应和响应中的所述另一个响应是对所述系列中的由预定数量的居间声脉冲串分开的声脉冲串的响应。
8.在一个实施例中,用于声换能器的控制器的特征在于,所述至少一部分包括结构噪声区域。
9.在一个实施例中,用于声换能器的控制器的特征在于,输出数据包括组合响应的差区域中的任何检测到的峰和该组合响应的后续相关区域中的任何检测到的峰。
10.在一个实施例中,用于声换能器的控制器的特征在于,所述系列的声脉冲串具有频率位移的签名序列,并且处理电路被配置为抑制差响应中不符合签名序列的任何峰。
11.根据本公开的另一方面,提供了一种障碍物检测方法,其特征在于,包括:感测声换能器对一系列的声脉冲串中的每个声脉冲串的响应;确定响应中的一个响应与响应中的另一个响应的至少一部分之间的差;以及检测差中的在与反射声脉冲串的障碍物的距离对应的延迟处的峰。
12.根据本公开的又一方面,提供了一种用于声换能器的控制器,其特征在于,控制器包括:发送器,用于驱动声换能器以生成具有频率位移的签名序列的一系列的声脉冲串;接收器,耦合到声换能器以感测对所述系列中的每个声脉冲串的响应;以及处理电路,用于部分地通过抑制不符合签名序列的任何峰从所述响应导出输出数据。
13.在一个实施例中,用于声换能器的控制器的特征在于,所述系列的声脉冲串包括啁啾(chirps),其中频率位移导致所述响应中的峰的对应时移,其中处理电路被配置为通过时移响应以补偿与签名序列对应的时移来导出组合信号,并且其中通过对组合信号执行峰检测处理来导出输出数据。
14.在一个实施例中,用于声换能器的控制器的特征在于,处理电路被配置为从响应中的每个响应中减去结构噪声。
15.根据本公开的另一方面,提供了一种障碍物检测方法,包括:感测声换能器对具有频率位移的签名序列的一系列的声脉冲串中的每个声脉冲串的响应;组合响应以获得增强符合签名序列的任何峰的组合响应;以及检测组合响应中的在与反射声脉冲串的障碍物的距离对应的延迟处的峰。
附图说明
16.图1是配备有超声波传感器的说明性车辆的俯视图。
17.图2是说明性泊车辅助系统的框图。
18.图3是说明性声学障碍物传感器的电路示意图。
19.图4是图示一个潜在的系统干扰源的示意图。
20.图5是其中接收到的且数字化的信号的信号强度被显示为接收时间的函数的曲线图,该曲线图指示结构噪声的存在。
21.图6是说明性传感器控制器的框图。
22.图7是比较具有三个不同频率位移的说明性测量周期的曲线图。
23.图8是用推导处理增强抗系统干扰性的第一说明性感测方法的流程图。
24.图9是使用频率位移的签名序列来增强抗性的第二说明性感测方法的流程图。
具体实施方式
25.本技术要求于2020年12月11日提交的、提名发明人为marek hustava和pavel kostelnik的、标题为“ultrasonic sensor system”的美国临时申请63/124,266的优先权。
26.应该理解的是,附图和以下描述不限制本公开,而是相反,它们为本领域普通技术人员理解落入权利要求语言范围内的所有修改、等同形式和替代形式提供了基础。
27.作为说明性用途的上下文,图1示出了配备有一组超声波泊车辅助传感器104的车辆102。传感器布置中传感器的数量和配置变化,并且并不罕见的是,每个保险杠上有六个传感器,其中每侧有两个附加的传感器用于盲点检测器。车辆可以采用传感器布置来检测
和测量到各个检测区域中的物体的距离,潜在地使用传感器进行单独测量以及协作(例如,三角测量、多接收器)测量。
28.超声波传感器是收发器,这意味着每个传感器可以发送和接收超声波脉冲串。发射的脉冲串从车辆向外传播,直到它们遇到物体或某种其它形式的声阻抗失配并从其反射。反射的脉冲串作为发射的脉冲串的“回波”返回到车辆。发射的脉冲串和接收到的回波之间的时间指示到反射点的距离。在许多系统中,一次只有一个传感器发送,但所有传感器都可以被配置为测量产生的回波。但是,可以通过使用正交波形、到非重叠检测区域的发送或具有使得能够筛选来自不同发送器的任何回波的签名的发送来支持多个同时发送。
29.在各种实施方式中,使用啁啾调制信号,例如线性调频(“lfm”)啁啾。啁啾是在发送期间改变频率的脉冲。上啁啾(up-chirp)是在发送期间频率增加的信号脉冲,并且下啁啾(down-chirp)是在发送期间频率降低的信号脉冲。为清楚起见,本文使用的示例将考虑线性增加或减少,但是在各种实施方式中,增加或减少不是线性的。可以在相关器中压缩啁啾的回波,而不会引入太多或任何相关噪声。由此,在不降低时间分辨率的情况下简化了回波的峰检测。此外,lfm啁啾经受多普勒频率偏移,而没有或有最少量的任何相关噪声增加。lfm啁啾可以用作发送脉冲,以用于测量与位于传感器系统的感测范围内的障碍物或物体的距离。
30.为清楚起见,如本文使用的术语“脉冲串”是指单个载波调制(固定频率)或啁啾调制(扫频)脉冲,其可以是通过驱动超声波传感器或其它声换能器产生的一系列的脉冲串之一。啁啾调制脉冲可以具有比典型载波调制脉冲更长的持续时间,例如超过1毫秒,诸如在2-3毫秒的范围内。虽然系统地改变系列中的啁啾调制脉冲的起始频率(或等效地,中心或结束频率)被认为是特别有用的,但这种频率变化也可以应用于系列中的载波调制脉冲。对于每个脉冲,频率改变可以被表达为相对于标称起始频率或标称载波频率的频率位移。
31.图2示出了电子控制单元(ecu)202,其作为星形拓扑中心耦合到各种超声波传感器204。当然,根据本文公开的原理,包括串行、并行和分层(树)拓扑的其它拓扑也适合并预期使用。为了提供自动泊车辅助,ecu 202还可以连接到一组致动器,诸如转向信号致动器206、转向致动器208、制动致动器210和节气门致动器212。ecu 202还可以耦合到用户交互界面214以接受用户输入并提供各种测量和系统状态的显示。使用界面、传感器和致动器,ecu 202可以提供自动泊车、辅助泊车、变道辅助、障碍物和盲点检测以及其它期望的特征。
32.现在参考图3描述一种潜在的传感器配置。所示传感器配置采用dsi3通信和供电标准,但其它技术,诸如在lin、can和sent标准中提供的那些技术,根据本文公开的原理也将是合适的并预期使用。除了图3的实施方式中所示的两个电源端子(vbat和gnd)之外,每个说明性超声波传感器仅通过单个输入/输出(“i/o”或“io”)线连接到ecu 202。当i/o线没有被ecu 202或传感器控制器302主动驱动为低(“断言(asserted)”状态)时,i/o线可以通过上拉电阻器偏置到供电电压(“去断言(de-asserted)”状态)。通信协议被设计为在任何给定时间仅使两个控制器中的一个(ecu 202或传感器控制器302)断言i/o线。
33.传感器控制器302包括i/o接口303,当i/o接口303置于隐性模式时,其监测i/o线以供ecu 202断言,并且当i/o接口303置于显性模式时,其驱动i/o线的状态。ecu通过断言i/o线向传感器传达命令,不同的命令由不同长度的断言表示。命令可以包括“发送和接收”命令、“仅接收”命令和“数据模式”命令。
34.传感器控制器302包括核心逻辑304,核心逻辑304根据固件和存储在非易失性存储器305中的参数进行操作以解析来自ecu的命令并执行适当的操作,包括超声波脉冲串的发送和接收。为了发送超声波脉冲串,核心逻辑304耦合到发送器306,发送器306利用来自压控振荡器307的适当调制的本地振荡器信号驱动传感器控制器302上的一组发送端子。发送器端子经由变压器m1耦合到压电元件pz。变压器m1将来自传感器控制器的电压(例如,12伏)升高到适合驱动压电元件的电平(例如,数十伏)。压电元件pz具有采用并联电容器c3调谐到期望值(例如,48khz)的谐振频率,并且具有采用并联电阻器r1调谐的谐振品质因数(q)。调谐电容器和调谐电阻器的一个说明性目的是将并联谐振频率调谐到接近压电元件的串联谐振频率。
35.如本文所使用的,术语“压电换能器”不仅包括压电元件,而且还包括用于调谐、驱动和感测压电元件的支持电路元件。在说明性实施方式中,这些支持元件是变压器m1、调谐电阻器和调谐电容器,以及dc隔离电容器。可选地,发送器306和放大器308的输出和输入电容也可以分别作为被认为是换能器的一部分的支持电路元件的寄生特性而包括在内。但是,术语“压电换能器”的使用不一定需要任何支持电路元件的存在,因为压电元件可以在没有这种支持元件的情况下被单独采用。在图示的实施方式中,一对dc隔离电容器c1、c2将压电元件耦合到传感器控制器的一对接收端子以免受高压。接收端子上的内部电压钳位提供进一步的保护。对于压电元件正在发送时的间隔这种保护会是是期望的。
36.经由i/o线接收到的命令触发核心逻辑304以操作发送器和接收器,并经由i/o线(本文也称为通信总线)将测量结果提供给ecu202。测量结果在本文也称为输出数据。核心逻辑304可以监测其它传感器状况,诸如在发送超声波脉冲串时供电电压“欠压”或“过压”、发送器的热关断、硬件错误、不完整的加电复位等。核心逻辑304可以检测和分类多个这样的换能器故障状态和错误状况,从而将适当的故障代码存储在内部寄存器或非易失性存储器305中。
37.由于接收到的回波信号通常在毫伏或微伏范围内,因此低噪声放大器308(在本文也称为“前端放大器”)放大来自接收端子的信号。随后,接收到的回波信号由模数转换器(adc)处理并由数字混频器309下变频。混频器309将放大且数字化的接收信号与本地振荡器信号相乘以将调制信号下变频到基带,以供数字信号处理器(dsp)310进一步滤波和处理。在一种实施方式中,混频器309是同相/正交(i/q)数字混频器303,给出零中频(zif)iq数据作为其输出。(虽然本文使用了术语“zif”,但在实践中下变频信号可以是低中频或“近基带”信号)。
38.dsp 310应用可编程方法以在脉冲串发送期间监测压电换能器,以及检测任何回波并测量它们的参数,诸如飞行时间(tof)、持续时间和峰振幅。此类方法可以采用阈值比较、最小间隔、峰检测、过零检测和计数、噪声水平确定,以及为提高可靠性和准确性而定做的其它可定制技术。值得注意的是,峰检测处理本身具有变化,其中一些变化执行上升沿检测、下降沿检测或峰最大值检测。dsp 310还可以处理放大的接收信号以分析换能器的特性,诸如谐振频率和品质因数,并且还可以检测换能器故障状态。
39.如上所述,在一个实施方式中,混频器309是正交混频器。该i/q数字混频器309具有连接到模数转换器(未示出)的输出端的输入端、用于接收混频信号f
tx
的输入端,以及分别用于提供同相信号和正交信号的第一和第二输出端,该同相信号和正交信号与从声换能
器输入的信号在复平面中的振幅和相位对应。dsp可以包括一个或多个数字滤波器,这些数字滤波器被配置为检索和使用存储在存储器中的滤波器系数来对zif-iq信号进行操作。更特别地,数字滤波器可以包括低通滤波器和相关器。dsp可以包括用于其它操作(包括相位推导、幅度测量、降采样、振幅缩放(衰减控制)、噪声抑制、峰检测、混响监测和换能器诊断)的可编程模块或专用电路系统,以及用于主机通信的接口。在进一步讨论这些模块之前,首先描述某些类型的系统干扰。
40.可重复的回波测量指示反射体的实际存在,与对于给定的测量可能效仿反射体但会从后续测量中消失的随机噪声相反。但是,系统噪声可以出现在每次测量中,潜在地指示不存在的反射体的存在或潜在地掩盖实际反射体的存在。图4示出了一个可能的示例,其中每个都使用相似的频率和测量周期的两个超声波感测系统正非常接近地操作。在泊车操作期间,第一汽车(“我们的汽车”)发射声脉冲串并监测来自障碍物的真实回波。第一汽车接收到的信号可能包括来自也执行泊车操作的第二汽车(“其它汽车”)的声脉冲串或相关联的回波(“虚假回波”)。在没有任何预防措施的情况下,虚假回波很可能被我们的汽车解释为指示附近有其它运动的障碍物。
41.作为另一个示例,图5是对于“隐藏”在其所耦合到的底盘面板后面的超声波传感器,其中信号强度被设置为接收时间的函数的曲线图。图示的测量周期包括四个时段:时段i为发送前噪声监测时段,时段ii为发送和混响时段,时段iii为短距离测量时段,并且时段iv为长距离测量时段。在时段i期间,放大器增益被最大化以使得能够测量环境噪声水平。在时段ii期间,超声波传感器被驱动以生成声脉冲串,然后是短暂的混响。在时段iii期间,底盘面板内的振动产生结构噪声,潜在地掩盖来自附近反射器的任何回波。此后,在时段iv期间,可以检测到来自更远反射体的回波。注意的是,对于一系列的声脉冲串中的相邻脉冲串,混响和结构噪声基本上是相同的,仅随温度、面板上层的堆积和传感器组件的老化而缓慢变化。
42.其它潜在的系统干扰源包括来自其它换能器或测量通道的串扰、电噪声、气动噪声或其它具有周期性分量的声学噪声,以及处理噪声。处理噪声的一个示例可以包括由次优滤波器设计引起的自相关噪声。
43.本文公开的两种技术对抗系统噪声:推导处理和在签名序列中偏移频率。推导处理涉及计算不同测量(诸如,来自系列中相邻的声脉冲串的测量)之间的差,从而消除系统干扰,诸如结构噪声。频率偏移涉及根据对于传感器是合理独特的签名序列将频率位移应用于系列中的声脉冲串,从而使传感器能够区分其脉冲串的回波与来自不同系统的脉冲串或回波。这两种技术可单独使用或一起使用。
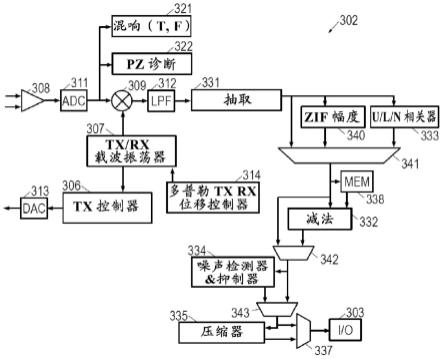
44.图6是说明性实施方式中的控制器302的框图。如下面进一步描述的,系统干扰处理可以完全在控制器302中执行,或者处理中的至少一些可以由ecu或主机处理器执行,如前面参考图2和图3所述,ecu或主机处理器经由通信总线接收某些数据。为简单起见,图6未示出控制器302的所有特征,诸如例如电源电子器件部分。
45.如上面参考图3所讨论的,控制器302包括接收器和发送器两者以及耦合到接收器的用于将接收到的响应转换成输出数据的处理电路。处理电路可以被实现为数字信号处理器(dsp)中的可编程模块或专用电路系统。
46.发送器包括超声载波振荡器307、发送器控制器306和数模转换器(dac)313。振荡
器307可以提供例如50khz的标称载波频率。tx控制器306可以从载波信号中导出数字脉冲串信号,在一些实施方式中提供持续大约2.5ms的线性调频的啁啾,在此期间频率从低于载波频率7khz向上扫描到低于载波频率1khz(下通道)或从高于载波频率1khz向上扫描到高于载波频率7khz(上通道)。可以采用下啁啾代替上啁啾中的一个或两个。取决于系统配置,tx控制器306可以单独在一个通道中操作,或者可以交替或以其它方式采用上通道和下通道两者。dac 313将数字声脉冲串转换成声换能器的模拟驱动信号。
47.此外,说明性实施方式包括频率位移控制单元314(由于多普勒效应和频率位移效应之间的相似性而被标记为“多普勒tx-rx位移控制”)。频率位移控制单元314被配置为对振荡器307生成的发送载波频率施加频率位移。(振荡器307为混频器309生成的参考频率优选地保持恒定)。这样的频率位移例如在200-2000khz的范围内,优选地在300-1200khz的范围内,诸如600-1000khz或800khz。如下面进一步描述的,发送载波频率的位移(其中参考频率保持恒定)导致声脉冲串的回波中对应的类似多普勒的频率偏移。当独特的频率位移序列被应用到发送载波频率时,回波中的频率位移的模式使得能够区分真实回波和虚假回波。
48.在每个声脉冲串之后,控制器302接收表示声换能器pz(图3)的响应的输入信号,该输入信号可选地由前端放大器308放大。模数转换器(adc)311以相对高的采样率(例如,400khz)将输入信号数字化。诊断块322,单独或与混响监视器块321结合,分析数字化响应信号以检测和诊断任何换能器故障状况。一些故障状况可以例如由过短的混响时段指示(其可能是由于换能器断开连接或有缺陷、受抑制的振动等而导致),而其它故障可以由过长的混响时段指示(有缺陷的安装、阻尼电阻不足等)。诊断块322可以检测和分类多个这样的换能器故障状况,从而将适当的故障代码存储在内部寄存器中,从那里它们可以被传送到ecu。混响监视器块321检测换能器混响时段的结束并发信号通知,可选地发起用于回波检测的信号处理。
49.数字化的响应随后在数字i/q混频器309中被下变频。数字i/q混频器309将输入信号偏移到和频和差频,其中差频接近基带(零频)。i/q数字混频器309输出接收信号的同相分量和正交分量。低通滤波器(lpf)312被布置在混频器309的下游以从下变频响应中去除某些噪声分量(包括和频处的输入信号图像)。抽取或“欠采样”单元331将经滤波的i/q信号的采样率降低到例如大约20khz。该抽取信号包括下变频响应信号的同相和正交分量,并且在本文中可以被称为zif iq数据。
50.说明性控制器302包括zif幅度单元340和相关器333,其中的每一个可以对来自抽取单元331的zif iq数据进行操作。zif幅度单元340例如通过对同相分量信号进行平方、对正交相位分量信号进行平方并将两者相加而将zif iq数据转换成zif幅度信号。幅度单元340还可以确定求和信号的平方根或对数。
51.相关器333可以采用可编程有限脉冲响应滤波器(fir)的形式,其具有可从存储器检索的复值系数。所选择的系数向相关器333提供脉冲响应,该脉冲响应优选地匹配声脉冲串的波形模板(上或下通道中的上啁啾或下啁啾)并且如在2021年1月25日提交的标题为“multichannel minimum distance echo detection”(ons04087)的共同拥有的申请us 17/156,742中所讨论的,脉冲响应可以基于自混响结束后经过的时间而变化,以增强近距离检测。(标签u/l/n表示用于感测上通道脉冲串、下通道脉冲串和近距离脉冲串的脉冲响
应)。相关器的输出信号包括峰,其中响应信号中的回波与相关器的脉冲响应匹配。由于啁啾信号的性质,当回波具有多普勒频移或频率位移时,此类峰的定时被偏移。
52.说明性控制器302包括推导处理级,其中多路复用器341选择zif iq数据、zif幅度信号和相关器输出信号333中的一个,用于潜在的推导处理。每隔一段时间,可以在存储器338中捕获所选择的信号作为基线响应。替代地,存储器338可以缓冲当前响应以与后续响应进行比较。该响应存储器338可以是控制器302中的存储器,但可以替代地是外部存储器。考虑到数据集的大小,合适的存储器类型例如是sram和dram。对于推导处理,减法单元332从当前响应中减去存储器338中的存储响应以去除诸如结构噪声之类的系统干扰。差信号被提供给多路复用器342,该多路复用器342在期望推导处理时选择差信号,并且在不期望推导处理时选择多路复用器341的输出。值得注意的是,控制器302可以在每次测量期间的预定点从推导处理切换到非推导处理,这在预期结构噪声仅存在于响应的一小部分中时会是有用的。因此,例如,推导处理可以在图5中的测量周期的时段iii期间被采用,而在测量周期的时段iv期间不被采用。
53.说明性控制器302包括噪声检测器/抑制器块334,其对由多路复用器342选择的信号进行操作,从而应用衰减补偿来放大表示回波的峰并应用非线性函数来抑制噪声。另一个多路复用器343在块334的输出和多路复用器342的输出之间进行选择,从而使得如果期望,那么能够绕过块334。
54.dsp可以执行峰检测以检测回波,依赖于峰的定时来确定回波行进时间并因此确定到障碍物的距离。如前所述,可以使用多种方法进行峰检测和峰定时的确定,诸如上升沿检测、下降沿检测和峰最大值检测,其中每一个都可以与振幅阈值测试进行组合;这些变化中的每一个都包含在检测或检测到的峰的范围内。除了定时之外,ecu还可以依靠峰幅度和持续性的测量来确定重要性。此外,在图6中所示的实施方式中,多路复用器343的输出端耦合到幅度检测器和压缩器块335。幅度检测器块335检测所选择的信号中的峰、确定峰的幅度并且计算与每个峰相关联的飞行时间(或等效地,确定距离)。可选的压缩方法用于减少表示该信息所需的位数。输出多路复用器337在压缩数据和未压缩数据之间进行选择以用于传感器接口块303,从而将回波测量信息传送到ecu。
55.注意的是,各种多路复用器可以被设置为向ecu提供原始zif iq数据、zif幅度信号或相关信号(其中每一个都可以被压缩或未压缩),从而使ecu能够执行期望的处理操作。此外,还可以选择zif iq数据,诸如同相分量或正交分量。此外,要发送的zif iq数据可以被预先选择,例如仅在预定义的时间范围内,或在满足预定义标准的时间范围内。
56.作为对如图6中所示的zif iq数据、zif幅度信号或相关信号执行推导处理的替代,可以对幅度/飞行时间信息执行推导处理。例如,基线响应可以指示在第一测量周期期间可能由于结构噪声引起的幅度和飞行时间信息。在随后的测量周期中,可以消除或至少与基线响应成比例地减少任何对应的峰。因此,对信号处理存在几种选项。选项的选择可以取决于客户要求以及期望输出的等级和分辨率。
57.如前所述,频率位移控制器314可以将频率位移的模式应用于系列中的声脉冲串,每个声脉冲串被频率偏移达模式中对应的位移值,从而为在处理后的响应信号中的真实回波提供独特的签名。对于啁啾信号,这种频率偏移在相关器的输出信号峰中产生时移。
58.图7示出了三个说明性测量周期,对应的频率位移为-300hz、0hz和+300hz。时段
802表示生成声脉冲串的驱动信号的(衰减)持续时间。时段804表示紧跟在驱动信号停止之后的换能器谐振时段。时段806表示不存在(或通过推导处理去除)任何结构噪声的回波检测时段。在相关器输出端,峰808、810和812对应于在-300hz、0hz和+300hz频率位移的情况下接收到的回波,表明峰之间的大约为14ms的时移,对应于大约2.4cm的明显距离偏移。800hz的频率位移将对应于大致6到7cm的明显距离偏移。可以类似地使用其它频率位移。
59.认识到频率位移对应于飞行时间测量中反射信号的时移,其进而表示所测量距离的偏移,所应用的频率偏移的模式提供了测量距离的偏移(或“抖动”)的对应模式。虚假回波的模式将与真实回波的模式不同。特别地,对于真实回波,测量距离的偏移对应于每个频率位移。当每个后续驱动信号(即脉冲)被赋予不同的频率位移并且监测系统和障碍物都不移动时,测量距离将根据与应用的频率脉冲对应的脉冲而变化。但是,源自另一个超声系统的虚假回波将不包括特定的频率位移模式,并且因此可以被识别。
60.将参考图4阐明该原理。其中,我们的汽车中存在障碍物监测系统。在示例中,其发送器应用以下tx频率位移序列:0hz(0cm)、0hz(0cm)、+800hz(+6cm)、-800hz(-6cm)、0hz(0cm)、+800hz(+6cm)。因此,在这个示例中,该系列的声脉冲串驱动信号包括至少六个连续的驱动信号。在这个示例中的频率位移为0hz或+800hz或-800hz。当测量真实回波与障碍物的距离d0时,测量序列将是d0、d0、d0+6cm、d0-6cm、d0、d0+6cm。该测量距离序列可以针对应用的频率位移被校正,从而产生d0、d0、d0、d0、d0、d0。因此,距离不会改变,并且回波将被归类为真实回波。
61.在这个示例中,假设其它汽车也直接或在被障碍物反射后发送被我们的汽车的障碍物监测系统接收到的声脉冲串。对于这个示例的目的而言,与这些声脉冲串相关联的观察距离为d1。如果其它汽车在没有频率位移模式的情况下发送声脉冲串,那么我们的汽车观察到相关联的距离为d1、d1、d1、d1、d1、d1。在对我们的汽车中的发送器使用的频率位移应用校正之后,该组测量变为d1、d1、d1-6cm、d1+6cm、d1、d1-6cm。很明显,经补偿的距离不够恒定,从而使我们的汽车能够将测量视为是由于虚假回波。
62.当其它汽车在连续脉冲中以不同的频率位移模式发送声脉冲串时,相同的结果将应用。实际上,存在多种可行的模式,因此应用的频率位移模式相同的可能性非常低,并且如果期望,甚至可以通过使用更长的签名模式进一步降低这种可能性。模式的可能变化包括模式的长度(本示例中为6)、应用的频率位移(在本示例中为0、+800hz)、每个模式不同位移的数量,以及其中应用位移的顺序的置换。应用的频率位移模式可以是循环的、随机的或两者(随机选择的位移的循环模式)。
63.在一种实施方式中,应用的频率位移模式是随机的,并且例如在传感器加电期间生成。噪声监测(图5的时段i)可以发生在最大增益设置下。在给定噪声监测时段期间回波幅度测量的最低有效位(lsb)可以用作生成频率位移的循环签名模式的随机数。频率位移可以存储在查找表(lut)中,并且采样的lsb用于寻址lut,从而识别要在模式中使用的频率位移。本文使用的噪声幅度监测样本的数量将定义随机tx/rx多普勒位移序列的长度。该随机签名生成处理可以间歇性地重复或在每次传感器加电时重复。
64.注意的是,如果我们的汽车或其它汽车正在移动,那么频率位移可能会由于多普勒效应而变化。这将改变测量的时移,但与上面预期的800hz位移相比,由于多普勒效应引起的偏移预计相对恒定且相对较小,仍然使得能够将真实回波与虚假回波区分开来。
65.图8是说明性感测方法的流程图,该方法包括推导处理和频率位移签名模式的使用。它在方框902中开始,其中传感器控制器302发送声脉冲串并获取测量响应以存储和用作基线。在一些实施方式中,针对每个频率位移(例如,-800hz、0hz和+800hz)获取单独的基线响应。在方框904中,传感器控制器可选地开始以循环方式使用频率位移签名,发送具有签名序列中当前点的频率位移的声脉冲串并获取测量响应。在方框906中,传感器控制器减去基线响应(或在一些实施方式中,减去基线响应的表示结构噪声的那部分),并过滤差信号以获得相关峰。在方框907中,传感器控制器例如通过将峰位置偏移达频率位移所期望的时移来补偿签名序列中当前点的该频率位移。
66.在方框908中,传感器控制器(或ecu)通过比较响应序列中的相关峰以识别那些保持相对静止或以指示相对线性运动的方式偏移的峰来检测障碍物。表现出过度抖动的峰作为虚假回波被抑制。太近或移动太快的障碍物会导致传感器控制器(或ecu)向驾驶员发出警报。
67.在方框910中,传感器控制器确定是否需要新的基线。如果自上次基线测量以来已经过去太多时间,或者如果发生另一个触发事件(诸如,生成发送载波频率的振荡器的微调或重新调谐),那么可以做出该确定。如果需要新的基线,那么处理返回到方框902。否则以方框904开始获取下一个测量响应。
68.图9是省略推导处理但采用先前描述的频率位移的签名序列的说明性感测方法的流程图。该方法是由方框904、907和908表示的先前描述的操作的循环。
69.虽然为了解释的目的,上面所示和描述的操作被视为是顺序的,但在实践中该处理可以由同时操作并且甚至可能推测性地操作以实现乱序操作的多个集成电路组件执行。顺序讨论并不意味着是限制性的。此外,前面的描述已经假定使用i/o线总线,但是包括lin、can和dsi3的其它总线实施方式是预期的。一旦完全理解上述公开内容,这些和许多其它修改、等效形式和替代形式对于本领域技术人员将变得清楚。旨在将以下权利要求解释为在适用的情况下包括所有此类修改、等效形式和替代形式。
70.总之,已经公开了一种说明性控制器,其包括:发送器,用于驱动声换能器以生成一系列的声脉冲串;接收器,耦合到声换能器以感测对所述系列中的每个声脉冲串的响应;以及处理电路,用于部分地通过确定响应中的一个响应与响应中的另一个响应的至少一部分之间的差来从所述响应导出输出数据。
71.还公开了说明性障碍物检测方法,其包括:感测声换能器对一系列的声脉冲串中的每个声脉冲串的响应;确定响应中的一个响应与响应中的另一个响应的至少一部分之间的差;以及检测差中的在与反射声脉冲串的障碍物的距离对应的延迟处的峰。
72.更进一步地,说明性公开的控制器包括:发送器,用于驱动声换能器以生成具有频率位移的签名序列的一系列的声脉冲串;接收器,耦合到声换能器以感测对所述系列中的每个声脉冲串的响应;以及处理电路,用于部分地通过抑制不符合签名序列的任何峰来从所述响应导出输出数据。
73.还公开了说明性障碍物检测方法,其包括:感测声换能器对具有频率位移的签名序列的一系列的声脉冲串中的每个声脉冲串的响应;组合响应以获得增强符合签名序列的任何峰的组合响应;以及检测组合响应中的在与反射声脉冲串的障碍物的距离对应的延迟处的峰。
74.上述的每一个都可以单独或结合使用,并且可以以任何合适的组合包括以下特征中的一个或多个:1.响应中的所述一个响应和响应中的所述另一个响应是对所述系列中的相邻声脉冲串的响应。2.响应中的所述一个响应和响应中的所述另一个响应是对所述系列中的由预定数量的居间声脉冲串分开的声脉冲串的响应。3.响应中的所述另一个响应是间歇性确定的基线响应。4.所述至少一部分包括结构噪声区域。5.输出数据包括组合响应的差区域中的任何检测到的峰和组合响应的后续相关区域中的任何检测到的峰。6.所述系列的声波脉冲具有频率位移的签名序列。7.处理电路被配置为抑制差响应中不符合签名序列的任何峰。8.所述系列的声脉冲串包括啁啾。9.频率位移导致所述响应中的峰的对应时移。10.处理电路被配置为通过时移响应以补偿与签名序列对应的时移来导出组合信号。11.输出数据是通过对组合信号执行峰检测处理导出的。12.在所述组合之前从响应中减去结构噪声。
75.根据一种实施方式,提供了一种用于声换能器的控制器,该控制器包括发送器,用于借助于驱动信号驱动声换能器以生成声脉冲串,所述驱动信号具有中心频率并且根据预定义的模式被调制。发送器被配置为生成一系列的连续的驱动信号,其中所述系列的第一驱动信号以第一中心频率提供,并且所述系列的连续的第二驱动信号以根据预定义频率位移相对于第一中心频率位移的第二中心频率提供。控制器还包括接收器,用于感测声换能器对每个脉冲串的回波的响应。控制器还包括耦合到发送器和接收器的处理电路,该处理电路可操作以将所述接收到的响应转换成表示对所述响应的所述调制驱动信号的输出数据。
76.根据另外的实施方式,所述频率位移是多普勒频移。例如,所述频率位移在200-2000hz的范围内。优选地,频率位移在300-1200hz的范围内,例如600-1000hz,诸如800hz。
77.根据可以与前两段的任何实施方式组合的另外的实施方式,发送器被配置为在所述系列的连续驱动信号内应用循环随机频率位移。
78.根据可以与前三段的任何实施方式组合的另外的实施方式,所述系列的所述驱动信号是啁啾调制驱动信号。优选地,所述系列的连续驱动信号具有至少1毫秒(ms)的持续时间。啁啾调制驱动信号例如是所谓的边带啁啾,其中心频率低于或高于振幅调制(am)信号的中心频率。啁啾是在发送期间改变频率的发送脉冲。可以在相关器中压缩啁啾的响应,而不会引入太多或任何相关噪声。啁啾可以是上啁啾(频率增加的啁啾)和下啁啾(频率降低的啁啾)。在另一个实施方式中,下啁啾与上啁啾相比具有倒斜率。在又一个另外的实施方式中,下啁啾与上啁啾相比具有不同的中心频率。
79.根据可以与前四段的任何实施方式组合的另外的实施方式,所述处理电路被配置为对所述响应应用基于推导的应用回波检测处理。例如,所述处理电路包括用于接收信号的相关的相关器和用于检测所述相关信号的幅度的幅度检测器。
80.根据可以与前六段的任何实施方式组合的另外的实施方式,所述输出数据包括零中频iq(zif-iq)数据和相关幅度数据,其中所述控制器还提供有用于将所述输出数据发送到微控制器的总线接口。例如,所述处理电路包括用于压缩所述zif-iq数据的zif-iq压缩器和用于将所述压缩的zif-iq数据与压缩形式的相关幅度数据多路复用的多路复用器。
81.根据可以与前七段的任何实施方式组合的另外的实施方式,所述控制器还包括用于存储响应的存储器,并且其中所述处理电路包括用于将接收到的响应从存储的响应中减
去的减法单元。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1