一种水下目标激光点云数据三维重建算法
1.本发明属于海洋激光探测技术技术领域,具体涉及一种水下目标激光点云数据三维重建算法。
背景技术:
2.海洋约占地球总面积的71%,目前针对水下探测主要利用的仍是水声探测技术,其有分辨率低、目标边缘模糊、形状畸变等问题,往往难以有效识别目标,无法满足油气管道(dm量级)、水下电缆(cm量级)、水下渔网避障(mm量级)、失事轮船飞机和水下文物等识别应用需求。而水下光学探测系统的高光学频率能提高探测的目标分辨率,并实现实时成像,能够完美的弥补声呐探测技术的不足。
3.激光在水下环境中具有较强的后向散射,影响水下光学探测系统的工作精度,使得设备探测到的点云数据包含较多的噪声点,无法有效识别目标以及对目标点云进行后续特征提取及配准处理。因此,研究水下目标三维点云重建变得极为重要,其结果对相关设备的设计研发具有重要意义。
技术实现要素:
4.本发明采用阈值分割、折射修正和噪声滤除算法对实验所得到的原始点云数据进行处理,得到只包含目标物的三维点云图像。
5.为实现上述目的,本发明提供如下技术方案:一种水下目标激光点云数据三维重建算法,按照以下步骤实施:
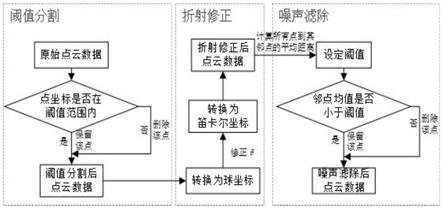
6.步骤1:阈值分割,水体的后向散射对三维点云数据获取的影响十分严重,其后向散射噪声主要集中于距激光雷达较近的位置,且与目标像有一个较为清晰的区分,采用阈值分割对其数据进行预处理;
7.步骤2:折射修正,由于激光雷达入射光线先后通过玻璃和水体这组分层介质,近红外光在超白玻璃中的折射率为1.5229,水体的折射率为1.34,因此在玻璃和水体交界面会发生折射现象,从而影响探测精度,使探测到的点云数据球形化,因此要予以修正;
8.步骤3:点云去噪,首先求得所有点到其邻点的平均距离,确定有效点。
9.优选的,步骤1具体按照以下步骤实施:
10.步骤1.1:选取点云坐标中x-y平面里的中心点为基准,根据目标物尺寸设定阈值,判断其他点云坐标是否小于该阈值,小于的点保存,大于的点删除。
11.优选的,步骤2具体按照以下步骤实施:
12.步骤2.1:将点云数据球转换为笛卡尔坐标系,将笛卡尔坐标系中的(xe,ye,ze)点云坐标转换至球坐标系中,根据折射原理,修正球坐标系中的参数θe,将修正后的球坐标点再转换回笛卡尔坐标系中显示;
13.已知笛卡尔坐标点为(xe,ye,ze),笛卡尔坐标转换至球坐标系中有:
[0014][0015]
式(1)中,θe为入射角,θr为透射角,参数re由rg和rw两部分组成,re=rg+rw,rg为玻璃中的光程,rw为水体中的光程,根据斯涅尔定律snell折射定律,
[0016][0017]
式(2)中,设ng为玻璃的折射率、nw为水体折射率,rg的大小可由rg=d/cosθe求得,需要修正的仅为水体中的光程;因此将球坐标系中的和转换至笛卡尔坐标系中,即:
[0018][0019]
修正后的真实坐标为:
[0020]
(xr,yr,zr)=(xg,yg,zg)+(xw,yw,zw)
ꢀꢀꢀ
(4)
[0021]
优选的,步骤3具体按照以下步骤实施:
[0022]
步骤3.1:在点云去噪过程中,首先求得所有点到其邻点的平均距离,根据所得平均距离的值设置滤波阈值,当所求点的邻点均值小于所设置的滤波阈值时,该点为有效点,否则为噪声点,将噪声点删除。
[0023]
与现有技术相比,本发明的有益效果如下:
[0024]
(1)本发明在获取了水下目标物的原始点云数据的基础上,根据原始点云数据的特征先后进行阈值分割、折射修正和点云滤波重建水下目标物的三维点云,最终得到只包含目标物特征的三维点云数据。该算法应用于水下目标三维点云重建,对水下目标探测有重要的启发,同时对研发小型水下无人滑翔机的避障和探测模块提供数据处理层面上的参考;
[0025]
(2)使用本发明进行点云重建过程中各步骤的点云数据,重建后水下滑翔机的点云图像特征清晰地显示了水下滑翔机模型的三维形状。
附图说明
[0026]
图1是本发明的点云数据三维重建算法流程图;
[0027]
图2是本发明的激光雷达光路图;
[0028]
图3是本发明点云重建算法各步骤数据(a)原始点云数据;(b)阈值分割后的数据;(c)折射修正后的数据;(d)点云滤波后的数据。具体实施方式
[0029]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0030]
请参阅图1-3,本发明提供一种技术方案:一种水下目标激光点云数据三维重建算法,按照以下步骤实施:
[0031]
步骤1:阈值分割,水体的后向散射对三维点云数据获取的影响十分严重,其后向散射噪声主要集中于距激光雷达较近的位置,且与目标像有一个较为清晰的区分,采用阈值分割对其数据进行预处理;
[0032]
步骤2:折射修正,由于激光雷达入射光线先后通过玻璃和水体这组分层介质,近红外光在超白玻璃中的折射率为1.5229,水体的折射率为1.34,因此在玻璃和水体交界面会发生折射现象,从而影响探测精度,使探测到的点云数据球形化,因此要予以修正;
[0033]
步骤3:点云去噪,首先求得所有点到其邻点的平均距离,确定有效点。
[0034]
进一步地,步骤1具体按照以下步骤实施:
[0035]
步骤1.1:选取点云坐标中x-y平面里的中心点为基准,根据目标物尺寸设定阈值,判断其他点云坐标是否小于该阈值,小于的点保存,大于的点删除。
[0036]
进一步地,步骤2具体按照以下步骤实施:
[0037]
步骤2.1:将点云数据球转换为笛卡尔坐标系,将笛卡尔坐标系中的(xe,ye,ze)点云坐标转换至球坐标系中,根据折射原理,修正球坐标系中的参数θe,将修正后的球坐标点再转换回笛卡尔坐标系中显示;
[0038]
已知笛卡尔坐标点为(xe,ye,ze),笛卡尔坐标转换至球坐标系中有:
[0039][0040]
式(1)中,θe为入射角,θr为透射角,参数re由rg和rw两部分组成,re=rg+rw,rg为玻璃中的光程,rw为水体中的光程,根据斯涅尔定律snell折射定律,
[0041][0042]
式(2)中,设ng为玻璃的折射率、nw为水体折射率,rg的大小可由rg=d/cosθe求得,需要修正的仅为水体中的光程;因此将球坐标系中的和转换至笛卡尔坐标系中,即:
[0043][0044]
修正后的真实坐标为:
[0045]
(xr,yr,zr)=(xg,yg,zg)+(xw,yw,zw)
ꢀꢀꢀ
(4)
[0046]
进一步地,步骤3具体按照以下步骤实施:
[0047]
步骤3.1:在点云去噪过程中,首先求得所有点到其邻点的平均距离,根据所得平均距离的值设置滤波阈值,当所求点的邻点均值小于所设置的滤波阈值时,该点为有效点,否则为噪声点,将噪声点删除。
[0048]
使用该算法进行点云重建过程中各步骤的点云数据如图3所示。重建后水下滑翔机的点云图像特征清晰地显示了水下滑翔机模型的三维形状。
[0049]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1