一种毫米波人体安检设备自动检测及反馈方法与流程
1.本发明涉及计算、推算或计数技术领域,具体涉及一种毫米波人 体安检设备自动检测及反馈方法。
背景技术:
2.为应对日益复杂的安检安防需求,准确检测人员携带的各类违禁 物品,确保公共场所安全,毫米波人体安检设备妥善解决了传统安检 设备在物品类型、安全可靠等方面的问题,具备了对金属和非金属物 品的检测能力,对人体安全无害,并采用无接触式快速安检模式,提 升旅客安检感受。
3.目前市面上机场使用的人体安检设备,主要安检流程为被检人员 进入设备按提示姿态站立,工作人员操作安检设备对人体进行扫描, 设备界面显示安检结果并标示出违禁物品。在此安检流程中,设备自 动化程度不高,仍需工作人员根据被检人员情况进行设备操作,安检 效率一定程度上受工作人员影响和限制。
技术实现要素:
4.本发明是为了解决人体安检设备的效率问题,提出了一种毫米波 人体安检设备自动检测及反馈方法,采用光学成像和毫米波成像结合 的方式对人体姿态进行检测,该方法能够在无工作人员操作设备的情 况下,自动对被检人员进行姿态识别和扫描,获得清晰的毫米波人体 图像,并反馈姿态检测结果及违禁物品安检结果至设备界面。使用此 系统的人体安检设备,能够应用于无人值守的安检场景。本发明在充 分保证人体安检准确、高效的前提下,实现设备无人操作,自动对进 入设备的人员进行安检并显示违禁物品安检结果,有效保证安检通行 速度。
5.本发明提供一种毫米波人体安检设备自动检测及反馈方法,其特 征在于:包括以下步骤:
6.s1、被检人员进入毫米波人体安检设备并按图形提示姿态站立;
7.s2、毫米波人体安检设备对被检人员进行光学成像,得到人体光 学图像,使用姿态检测算法对人体光学图像中的人体姿态是否正确进 行检测,如果否,则发出语音提示使被检人员调整姿态;如果是,则 进入步骤s3;
8.姿态检测算法的流程为:首先识别出人体,再识别出人体关键点 坐标,然后通过对人体关键点坐标间的位置关系和长度关系判断人体 姿态是否正确;
9.s3、毫米波人体安检设备对被检人员进行扫描并获得人体毫米波 图像,使用姿态检测算法对人体毫米波图像中的人体姿态是否正确进 行检测并检测人体毫米波图像是否连续,如果否,则发出语音提示被 检人员调整姿态,返回步骤s2;如果是,则进入步骤s4;
10.s4、毫米波人体安检设备自动判定人体毫米波图像中的违禁物品 并将违禁物品安检结果显示在毫米波人体安检设备的界面上,毫米波 人体安检设备自动检测及反馈完成。
11.本发明所述的一种毫米波人体安检设备自动检测及反馈方法,作 为优选方式,姿态检测算法识别出人体的具体方法为:使用自上而下 的检测策略,通过yolo算法识别出人体,再使用hrnet高精度检 测模型检测出所有人体关键点,并形成人体关键点坐标;
12.人体关键点包括鼻子、手腕、手肘、肩膀、臀部、膝盖、脚腕;
13.人体关键点坐标包括:鼻子坐标(x1,y1)、左手腕坐标(x2, y2)、右手腕坐标(x3,y3)、左手肘坐标(x4,y4)、右手肘坐标(x5, y5)、左肩膀坐标(x6,y6)、右肩膀坐标(x7,y7)、左臀部坐标(x8, y8)、右臀部坐标(x9,y9)、左膝盖坐标(x10,y10)、右膝盖坐标 (x11,y11)、左脚腕坐标(x12,y12)、右脚腕坐标(x13,y13)。
14.本发明所述的一种毫米波人体安检设备自动检测及反馈方法,作 为优选方式,通过对人体关键点坐标间的位置关系判断人体姿态是否 正确的具体方法包括:
15.a、根据人体关键点坐标判断人体各部位间高低关系是否正确;
16.b、根据人体关键点坐标判断上、下肢位置是否正确;
17.c、通过对人体长度关系判断人体姿态是否正确;
18.检测人体毫米波图像是否连续的方法为:将所有人体关键点周围 m*m区域内的像素值取平均值得到人体关键点像素值,判定为人体 毫米波图像连续的标准为:人体关键点像素值全部大于k。
19.本发明所述的一种毫米波人体安检设备自动检测及反馈方法,作 为优选方式,根据人体关键点坐标判断人体各部位间高低关系是否正 确的判断标准为:以下所有条件都成立:鼻子比肩膀高、肩膀比臀部 高、肘比肩膀高5cm、手腕比肘高、臀部比膝盖高、膝盖比脚腕高。
20.本发明所述的一种毫米波人体安检设备自动检测及反馈方法,作 为优选方式,根据人体关键点坐标判断人体各部位间高低关系是否正 确的判断标准为:以下所有条件都成立:
21.y1<y6,y1<y7,y6<y8,y7<y9,y6-y4>20,y7-y5>20, y2<y4,y3<y5,y8<y10,y9<y11,y10<y12,y11<y13。
22.本发明所述的一种毫米波人体安检设备自动检测及反馈方法,作 为优选方式,根据人体关键点坐标判断上、下肢位置是否正确的判断 标准为:以下所有条件都成立:小臂与大臂夹角成50
°
至80
°
夹角、 手腕距离图像边界大于10cm、两脚左右对称且在中线两侧、双脚间 距离在35cm至40cm之间。
23.本发明所述的一种毫米波人体安检设备自动检测及反馈方法,作 为优选方式,根据人体关键点判断上、下肢位置是否正确,判断标准 为:以下所有条件都成立:
[0024][0025]
x2>40,400-x3>40,x12<200,x13>200, |(x
13-200)-(200-x
12
)|<20,140≤x13-x12≤160。
[0026]
本发明所述的一种毫米波人体安检设备自动检测及反馈方法,作 为优选方式,通过对人体长度关系判断人体姿态是否正确的具体方法 包括:小臂大于身高的9%、两小臂长度差小于5cm、大臂大于身高 的9%、两大臂长度差小于5cm、左右肘高度相差小于10cm、上半身 大于身高的20%、左上半身与右上半身长度相差小于10cm、大腿大 于身高的12%、
两大腿长度差小于5cm、小腿大于身高的12%、两小 腿长度差小于5cm、肩宽大于身高的10%、左右肩膀高度相差小于 5cm、胯宽大于身高的5%、左右臀部高度相差小于5cm。
[0027]
本发明所述的一种毫米波人体安检设备自动检测及反馈方法,作 为优选方式,通过对人体长度关系判断人体姿态是否正确的判断标准 为:以下所有条件都成立:
[0028][0029][0030][0031][0032][0033][0034]
|y
5-y4|<20,y
8-y6>20%
×
h,y
9-y7>20%
×
h, |(y
8-y6)-(y
9-y7)|<40
[0035][0036][0037][0038][0039][0040][0041]
x
7-x6>10%
×
h,|y
7-y6|<20,x
9-x8>5%
×
h,|y
9-y8|<20;
[0042]
其中,h为人体身高,
[0043][0044]
本发明所述的一种毫米波人体安检设备自动检测及反馈方法,作 为优选方式,m为3,k为10。
[0045]
该系统的使用步骤如下:
[0046]
第一步,被检人员进入安检设备并按图形提示姿态站立;
[0047]
第二步,对被检人员进行光学成像,通过使用本发明提出的姿态 检测算法,对人体姿态是否正确进行检测,如果姿态异常则被检人员 根据语音提示调整姿态,如果姿态正常则进入第三步;
[0048]
第三步,设备对被检人员进行扫描并获得毫米波图像,同样采用 本发明提出的姿态检测算法,对人体毫米波图像中的姿态是否正确进 行检测,如果姿态异常则被检人员根据语音提示调整姿态,如果姿态 正常且图像清晰,则进入第四步;
[0049]
第四步,设备使用违禁物品检测算法对人体毫米波图像进行自动 判定,并将违禁物品安检结果显示在设备界面上。
[0050]
本发明具有以下优点:
[0051]
(1)相比于单一图像来源的人体姿态检测,本方法采用光学成像 和毫米波成像结合的方式对人体姿态进行检测,通过光学成像确保被 检人员基本符合姿态要求,可以开始安检扫描,通过毫米波成像穿透 衣物,直接对人体姿态进行检测,尤其能够对光学成像无法发现的人 员微动进行检测。最终通过上述两种方式确保本次扫描姿态正确、图 像清晰可用。
[0052]
(2)相比于需要工作人员辅助操作的安检系统,本发明提出的毫 米波姿态自动检测及反馈系统,无需工作人员操作及监管,被检人员 根据设备灯光提示,自行进入设备,设备自动检测被检人员姿态并将 检测结果反馈至设备界面,同时提示被检人员姿态是否异常。
[0053]
(3)自动检测及反馈速度快,在本次安检扫描完成后0.5秒内, 就能够在设备界面反馈被检人员姿态检测结果及违禁物品安检结果, 有效保证安检通行速度。
附图说明
[0054]
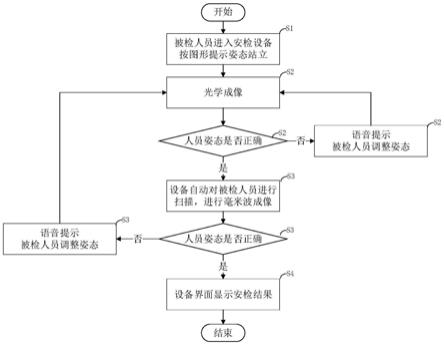
图1为一种毫米波人体安检设备自动检测及反馈方法流程图;
[0055]
图2为一种毫米波人体安检设备自动检测及反馈方法标准的人 体姿态正面图;
[0056]
图3为一种毫米波人体安检设备自动检测及反馈方法人体关键 点识别坐标图;
[0057]
图4为一种毫米波人体安检设备自动检测及反馈方法人体姿态 检测算法流程图。
具体实施方式
[0058]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方 案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部 分实施例,而不是全部的实施例。
[0059]
实施例1
[0060]
如图1所示,一种毫米波人体安检设备自动检测及反馈方法,包 括以下步骤:
[0061]
s1、被检人员进入毫米波人体安检设备并按图形提示姿态站立;
[0062]
s2、毫米波人体安检设备对被检人员进行光学成像,得到人体光 学图像,如图2所示,使用姿态检测算法对人体光学图像中的人体姿 态是否正确进行检测,如果否,则发出语音提示使被检人员调整姿态; 如果是,则进入步骤s3;
[0063]
姿态检测算法的流程为:首先识别出人体,再识别出人体关键点 坐标,然后通过对人体关键点坐标间的位置关系和长度关系判断人体 姿态是否正确;
[0064]
s3、毫米波人体安检设备对被检人员进行扫描并获得人体毫米波 图像,使用姿态检测算法对人体毫米波图像中的人体姿态是否正确进 行检测并检测人体毫米波图像是否连续,如果否,则发出语音提示被 检人员调整姿态,返回步骤s2;如果是,则进入步骤s4;
[0065]
s4、毫米波人体安检设备自动判定人体毫米波图像中的违禁物品 并将违禁物品安检结果显示在毫米波人体安检设备的界面上,毫米波 人体安检设备自动检测及反馈完成;
[0066]
姿态检测算法识别出人体的具体方法为:使用自上而下的检测策 略,通过yolo算
法识别出人体,再使用hrnet高精度检测模型检 测出所有人体关键点,并形成人体关键点坐标;
[0067]
人体关键点包括鼻子、手腕、手肘、肩膀、臀部、膝盖、脚腕;
[0068]
如图3所示,人体关键点坐标包括:鼻子坐标(x1,y1)、左手 腕坐标(x2,y2)、右手腕坐标(x3,y3)、左手肘坐标(x4,y4)、 右手肘坐标(x5,y5)、左肩膀坐标(x6,y6)、右肩膀坐标(x7,y7)、 左臀部坐标(x8,y8)、右臀部坐标(x9,y9)、左膝盖坐标(x10, y10)、右膝盖坐标(x11,y11)、左脚腕坐标(x12,y12)、右脚腕坐 标(x13,y13);
[0069]
如图4所示,通过对人体关键点坐标间的位置关系判断人体姿态 是否正确的具体方法包括:
[0070]
a、根据人体关键点坐标判断人体各部位间高低关系是否正确;
[0071]
b、根据人体关键点坐标判断上、下肢位置是否正确;
[0072]
c、通过对人体长度关系判断人体姿态是否正确;
[0073]
检测人体毫米波图像是否连续的方法为:将所有人体关键点周围 m*m区域内的像素值取平均值得到人体关键点像素值,判定为人体 毫米波图像连续的标准为:人体关键点像素值全部大于k;m为3, k为10;
[0074]
根据人体关键点坐标判断人体各部位间高低关系是否正确的判 断标准为:以下所有条件都成立:鼻子比肩膀高、肩膀比臀部高、肘 比肩膀高5cm、手腕比肘高、臀部比膝盖高、膝盖比脚腕高;
[0075]
根据人体关键点坐标判断人体各部位间高低关系是否正确的判 断标准为:以下所有条件都成立:
[0076]
y1<y6,y1<y7,y6<y8,y7<y9,y6-y4>20,y7-y5>20, y2<y4,y3<y5,y8<y10,y9<y11,y10<y12,y11<y13;
[0077]
根据人体关键点坐标判断上、下肢位置是否正确的判断标准为: 以下所有条件都成立:小臂与大臂夹角成50
°
至80
°
夹角、手腕距 离图像边界大于10cm、两脚左右对称且在中线两侧、双脚间距离在 35cm至40cm之间;
[0078]
根据人体关键点判断上、下肢位置是否正确,判断标准为:以下 所有条件都成立:
[0079][0080]
x2>40,400-x3>40,x12<200,x13>200, |(x
13-200)-(200-x
12
)|<20,140≤x13-x12≤160;
[0081]
通过对人体长度关系判断人体姿态是否正确的具体方法包括:小 臂大于身高的9%、两小臂长度差小于5cm、大臂大于身高的9%、两 大臂长度差小于5cm、左右肘高度相差小于10cm、上半身大于身高 的20%、左上半身与右上半身长度相差小于10cm、大腿大于身高的 12%、两大腿长度差小于5cm、小腿大于身高的12%、两小腿长度差 小于5cm、肩宽大于身高的10%、左右肩膀高度相差小于5cm、胯宽 大于身高的5%、左右臀部高度相差小于5cm;
[0082]
通过对人体长度关系判断人体姿态是否正确的判断标准为:以下 所有条件都成立:
[0083][0084][0085][0086][0087][0088][0089]
|y
5-y4|<20,y
8-y6>20%
×
h,y
9-y7>20%
×
h, |(y
8-y6)-(y
9-y7)|<40
[0090][0091][0092][0093][0094][0095][0096]
x
7-x6>10%
×
h,|y
7-y6|<20,x
9-x8>5%
×
h,|y
9-y8|<20;
[0097]
其中,h为人体身高,
[0098][0099]
实施例2
[0100]
如图1所示,一种毫米波人体安检设备自动检测及反馈方法,通 过以下步骤实现。
[0101]
第一步,设备指示灯为绿色,代表设备当前可进入,此时被检人 员进入安检设备,按足印提示方向转身,按图示人体姿态站立。
[0102]
第二步,设备对被检人员进行光学成像,此时设备指示灯变为蓝 色,排队人员看到设备显示蓝灯,代表设备正在运行,此时下一个人 不应进入设备。系统对光学成像结果进行姿态检测,如果姿态正确, 则进入下一步骤。如果姿态错误,则设备发出语音提示,要求被检人 员调整姿态,设备将在2秒后重新进行光学成像。
[0103]
在此步骤中,系统采用了姿态检测算法,对人体姿态是否正确进 行检测。标准的人体姿态如图2所示,采用双臂向上举、两脚跨立的 姿态,增加对腋下及两腿间等隐蔽部位违禁物品的检出率。姿态检测 算法的实现流程如图4所示。
[0104]
首先,获得人体图像(光学图像)。
[0105]
然后,采取自上而下的检测策略,通过yolo(you only lookonce)算法识别出人体,该算法具有检测速度快(达到10ms级)、 能够部署在摄像头等终端的特点,采用hrnet高
精度检测模型,检 测出人体所有关键点,包括鼻子、手腕、手肘、肩膀、臀部、膝盖、 脚腕,如图3所示,形成各关键点的坐标。
[0106]
然后,根据坐标判断人体各部位间高低关系是否正确,判定条件 如下:
[0107]
y1<y6[0108]
y1<y7[0109]
y6<y8[0110]
y7<y9[0111]y6-y4>20
[0112]y7-y5>20
[0113]
y2<y4[0114]
y3<y5[0115]
y8<y
10
[0116]
y9<y
11
[0117]y10
<y
12
[0118]y11
<y
13
[0119]
即鼻子比肩膀高、肩膀比臀部高、肘比肩膀高5cm(换算为像素 点为20)、手腕比肘高、臀部比膝盖高、膝盖比脚腕高。
[0120]
然后,判断上、下肢位置是否正确,判定条件如下:
[0121][0122]
x2>40
[0123]
400-x3>40
[0124]
x
12
<200
[0125]
x
13
>200
[0126]
|(x
13-200)-(200-x
12
)|<20
[0127]
140≤x
13-x
12
≤160
[0128]
即小臂与大臂夹角成50
°
至80
°
夹角、手腕距离图像边界大于 10cm(换算为像素点为40)、两脚左右对称(与中线距离差小于5cm, 换算为像素点为20)且在中线两侧、双脚间距离在35cm至40cm之 间(换算为像素点为20)。
[0129]
然后,判断各部位间长度关系是否符合gb10000-1988《中国成 年人人体尺寸》中的相关要求,判定条件如下:
[0130][0131][0132][0133]
[0134][0135]
|y
5-y4|<20
[0136]y8-y6>20%
×h[0137]y9-y7>20%
×h[0138]
|(y
8-y6)-(y
9-y7)|<40
[0139][0140][0141][0142][0143][0144][0145]
x
7-x6>10%
×h[0146]
|y
7-y6|<20
[0147]
x
9-x8>5%
×h[0148]
|y
9-y8|<20
[0149]
即小臂大于身高的9%、两小臂长度差小于5cm(换算为像素点 为20)、大臂大于身高的9%、两大臂长度差小于5cm(换算为像素 点为20)、左右肘高度相差小于10cm(换算为像素点为40)、上半身 大于身高的20%、左上半身与右上半身长度相差小于10cm(换算为 像素点为40)、大腿大于身高的12%、两大腿长度差小于5cm(换算 为像素点为20)、小腿大于身高的12%、两小腿长度差小于5cm(换 算为像素点为20)、肩宽大于身高的10%、左右肩膀高度相差小于5cm (换算为像素点为20)、胯宽大于身高的5%、左右臀部高度相差小 于5cm(换算为像素点为20)。其中h为人体身高,
[0150]
通过计算得出。
[0151]
如果上述任一步骤判定为姿态不正确,则通过语音提示被检人员 调整姿态。
[0152]
第三步,此时光学成像已判定人员姿态正确,设备自动对被检人 员进行扫描,获得被检人员毫米波图像,对毫米波成像结果进行姿态 检测,如果姿态正确,则进入下一步骤。如果姿态错误,则设备发出 语音提示,要求被检人员调整姿态,设备将在2秒后重新进行光学成 像。
[0153]
与光学成像相比,设备通过毫米波成像穿透衣物,直接对人体姿 态进行检测,尤其能够对光学成像无法发现的人员微动进行检测。在 此步骤中仍使用第二步中使用的姿态检测算法,对人体姿态是否正确 进行检测。与光学图像人体姿态检测不同的是,在毫米波图像人体姿 态检测中,增加了一个步骤,通过检测图像是否连续判断姿态是否正 确,判
定条件如下:图3橙色连线上的各坐标点,以该坐标点周围的 3
×
3坐标点的像素值取平均,作为该坐标点的像素值,连线上所有 坐标点的像素值全部大于10,则判定为图像连续。
[0154]
最终通过光学成像及毫米波成像两种方式确保本次扫描姿态正确、 图像清晰可用。
[0155]
第四步,设备使用违禁物品检测算法对人体毫米波图像中是否存 在违禁物品进行自动判定,在毫米波成像完成0.5秒内,在设备界面 反馈被检人员姿态检测结果及违禁物品安检结果,流程结束。
[0156]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范 围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技 术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变, 都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1