一种基于无人机视频流航线的复杂地形三维模型构建方法
1.本发明属于摄影测量学领域,涉及复杂地形环境的无人机视频流摄影测量和航线规划技术,具体是一种基于无人机视频流航线的复杂地形三维模型构建方法。
背景技术:
2.无人机技术的发展为需要长时间序列重复观测的地貌调查、监测及其形态演化分析提供了一种新的技术手段;无人机凭借其机动、灵活、低成本、数据成果丰富等优势,现广泛应用于滑坡灾害监测、洪水灾害评估、地貌形态演化分析和农作物监测等方面;但是,多样的地貌形态往往伴随着地形环境复杂、地势起伏多变、野外实地观测不全面等问题。
3.对于地形地势险峻、垂直梯度差异明显、自然环境气候多变的复杂地形环境,若采用传统的航线规划方法会存在以下问题:1)受自然环境影响,飞行高度过高,云雾遮挡严重,无人机卫星信号易缺失;2)狭窄区域航带较多且靠近两侧山体,若采用多旋翼或固定翼无人机,飞行安全性低且成本高;3)航线类型过于单一,数据获取中可能存在遮挡盲区,导致影像数据缺失、重叠度不足、分辨率降低;4)航线的不合理导致不必要的数据冗余、内业处理困难、三维模型构建时效性和测量精度降低;因此,需要提出一种在复杂地形环境下更为安全快捷、低成本、低冗余的无人机航线规划和快速、高效构建高质量三维模型的方法。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一;为此,本发明提出了一种基于无人机视频流航线的复杂地形三维模型构建方法,用于解决现有技术在复杂地形环境下,无人机航线规划成本高、冗余高以及三维模型构建效率低、精度低的技术问题,本发明在结合传统无人机航线规划和无人机视频流摄影方法的基础上,通过确定复杂地形环境下被摄目标所处空间的几何信息和相关的已知视频摄影参数来解决了上述问题。
5.为实现上述目的,根据本发明的第一方面的实施例提出一种基于无人机视频流航线的复杂地形三维模型构建方法,包括:
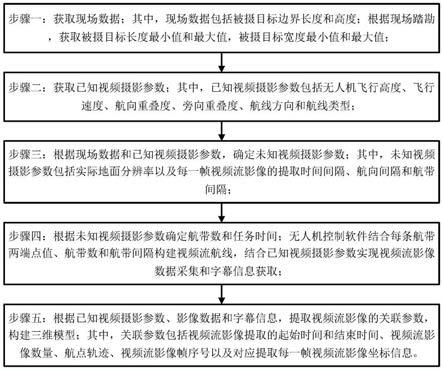
6.步骤一:获取现场数据;其中,所述现场数据包括被摄目标边界长度δx和高度δy;根据现场踏勘,获取被摄目标长度最小值x
min
和最大值x
max
,被摄目标宽度最小值y
min
和最大值y
max
;
7.步骤二:获取已知视频摄影参数;其中,已知视频摄影参数包括无人机飞行高度h、飞行速度vi、航向重叠度p
x
、旁向重叠度py、航线方向和航线类型li;
8.步骤三:根据现场数据和已知视频摄影参数,确定未知视频摄影参数;其中,未知视频摄影参数包括实际地面分辨率gsd以及每一帧视频流影像的提取时间间隔ti、航向间隔d
1-i
和航带间隔d
2-i
;
9.步骤四:根据未知视频摄影参数确定航带数mi和任务时间ti;无人机控制软件结合每条航带两端点值、航带数和航带间隔构建视频流航线,结合已知视频摄影参数实现视频流影像数据采集和字幕信息获取;
10.步骤五:根据已知视频摄影参数、影像数据和字幕信息,提取视频流影像的关联参数,构建三维模型;其中,关联参数包括视频流影像提取的起始时间ts和结束时间te、视频流影像数量ni、航点轨迹p、视频流影像帧序号numi以及对应提取每一帧视频流影像坐标信息(x
lon
,y
lat
,z
alt
)。
11.优选的,步骤一所述现场数据的获取包括:
12.s101:通过公式δx=x
max-x
min
确定被摄目标边界长度δx;其中,δx、x
max
和x
min
的单位均为m;
13.s102:通过公式δy=y
max-y
min
确定被摄目标边界宽度δy;其中,δy、y
max
和y
min
的单位均为m。
14.优选的,步骤二中无人机飞行高度h通过现场踏勘和实际地形结合获取;飞行速度vi、航向重叠度p
x
和旁向重叠度py根据实际情况设置;航线方向和航线类型li的获取具体包括:
15.构建以被摄目标边界长度为横坐标、边界宽度为纵坐标的平面坐标系;i用于区分不同方向的航线类型;
16.当i=1,表示平面坐标系中航线方向由边界长度最小值、宽度最小值呈竖直折线方向指向边界长度最大值、宽度最大值,即:(x
min
,y
min
)
→
(x
max
,y
max
),则l1表示竖直方向航线类型;
17.当i=2,表示平面坐标系中航线方向由边界长度最小值、宽度最大值呈水平折线方向指向边界长度最大值、宽度最小值,即:(x
min
,y
max
)
→
(x
max
,y
min
),则l2表示水平方向航线类型。
18.优选的,步骤三中所述未知视频摄影参数的确定包括:
19.s301:通过公式确定实际地面分辨率gsd;其中被摄目标实际地面分辨率gsd的单位为cm/px;δ为视频流影像像元尺寸大小,单位为mm;h为无人机与被摄目标的飞行高度,单位为m;f为摄影镜头焦距,单位为mm;
20.s302:通过公式组分别获取无人机镜头纵向视场角fovw和横向视场角fov
l
;其中纵向视场角fovw和横向视场角fov
l
的单位是
°
;cmos_l和cmos_w分别为镜头传感器实际长度和宽度,单位为mm;
21.s303:通过公式组确定每一帧视频流影像的提取时间间隔ti;其中每一帧视频流影像的提取时间间隔ti,单位为
s;航向重叠度p
x
和旁向重叠度py通过百分数表示;vi为无人机飞行速度,单位为m/s;
22.s304:通过公式组计算航向间隔d
1-i
,其中航向间隔d
1-i
的单位为m;
23.s305:通过公式组计算航带间隔d
2-i
;其中航带间隔d
2-i
的单位为m。
24.优选的,步骤四中构建所述视频流航线包括:
25.s401:根据航线方向和航线类型li,通过公式组计算航带数mi;其中,航带数mi的单位为条;
26.s402:根据航线方向和航线类型li,通过公式组确定任务时间ti;其中任务时间ti的单位为min;
27.s403:航向方向、航线类型和航带数结合无人机控制软件,逐一确定每条航带的两端点值;根据航带间隔、飞行速度控制无人机至每一航带,构建视频流航线,实现视频流影像数据采集和字幕信息获取;其中,字幕信息包括每一帧视频流影像的拍摄参数和坐标位置。
28.优选的,步骤五中构建无人机视频流影像的三维模型,包括:
29.s501:根据航线方向航线类型li和s303确定的提取时间间隔ti,通过公式组计算提取视频流影像数量ni;其中提取视频流影像数量ni的单位为张;ts和te分别为提取视频流影像起始和结束时间,单位为s;
30.s502:根据航线方向航线类型li、航带数mi和提取时间间隔ti确定航点轨迹p,包括:
31.当i=1,对应航线方向和航线类型l1,航带数m1和提取时间间隔t1;
32.且当航带数m1为奇数,则:
33.p(j,k)=(x
min
+(j-1)
×d2-1
,y
min
+(k-1)
×d1-1
);
34.当(y
min
+(k-1)
×d1-1
)>y
max
时,则p(j,k)=(x
min
+(j-1)
×d2-1
,y
max
);其中,j=1,2,3,
…
,m1+1,k=1,2,3,
…
,n1+2;
35.当航带数m1为偶数,则:
36.p(j,k)=(x
min
+(j-1)
×d2-1
,y
max-(k-1)
×d1-1
);
37.当(y
max-(k-1)
×d1-1
)<y
min
时,则p(j,k)=(x
min
+(j-1)
×d2-1
,y
min
);其中,j=1,2,3,
…
,m1+1,k=1,2,3,
…
,n1+2;
38.当i=2,对应航线方向和航线类型l2,航带数m2和提取时间间隔t2;
39.且当航带数m2为奇数,则:
40.p(j,k)=(x
min
+(k-1)
×d1-2
,y
max-(j-1)
×d2-2
);
41.当(x
min
+(k-1)
×d1-2
)>x
max
时,则p(j,k)=(x
max
,y
max-(j-1)
×d2-2
);其中,j=1,2,3,
…
,m2+1,k=1,2,3,
…
,n2+2;
42.当航带数m2为偶数时,则:
43.p(j,k)=(x
max-(k-1)
×d1-2
,y
max-(j-1)
×d2-2
);
44.当(x
max-(k-1)
×d1-2
)<x
min
时,则p(j,k)=(x
min
,y
max-(j-1)
×d2-2
);其中,j=1,2,3,
…
,m2+1,k=1,2,3,
…
,n2+2;
45.s503:根据航线方向航线类型li和s501确定的提取影像数量ni,通过公式组:
[0046][0047]
确定提取视频流影像帧序号numi;其中,frame_rate为视频流帧率,单位为fps;
[0048]
s504:视频流影像帧序号和字幕信息进行匹配,确定每一帧视频流影像的坐标信息(x
lon
,y
lat
,z
alt
)。
[0049]
优选的,根据实际地形,控制无人机按照两种航向方向和航线类型进行飞行,获取视频流影像和字幕信息;再结合每一帧视频流影像的坐标信息构建三维模型。
[0050]
与现有技术相比,本发明的有益效果是:
[0051]
本发明以摄影测量为基础,结合传统无人机航线规划方法的优缺点和无人机视频拍摄方式,提出了一种基于无人机视频流航线的复杂地形三维模型构建方法,该方法首先根据现场踏勘,确定被摄目标边界范围;然后确定已知视频摄影参数;接着确定实际地面分辨率、每一帧视频流影像提取时间间隔、航向间隔、航带间隔等未知视频摄影参数;然后根据已知和未知视频摄影参数,确定航带数、任务时间,构建视频流航线,实现视频流影像数据采集;最后,确定提取视频流影像的起始和结束时间、视频流影像数量、每一帧视频流影像的坐标信息和航点轨迹,实现视频流影像的三维模型快速构建。试验表明,本发明提供的方法对于复杂地形环境适用性强;能科学合理的进行视频流航线规划,避免人为因素干扰;实现快速高效构建可测量的三维模型,减少数据冗余,工作效率和飞行安全性大幅提升。
附图说明
[0052]
图1为本发明的实现流程图;
[0053]
图2为本发明中两类视频流航线方向和航线类型示意图;
[0054]
图3为本发明中两类视频流航线方向和航线类型、航向重叠度、旁向重叠度示意图;
[0055]
图4为本发明根据已知和未知视频摄影参数模拟的不同视频流航线类型航迹图;
[0056]
图5为本发明中不同航线实际执行示意图;
[0057]
图6为本发明中不同航线下构建的复杂地形环境下泥石流沟谷三维模型图;
[0058]
图7为本发明中视频流航线与传统航线下得到的三维模型纹理细节对比图。
具体实施方式
[0059]
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0060]
本技术提供了一种基于无人机视频流航线的复杂地形三维模型构建方法,用于解决复杂地形环境下航线类型单一、被摄目标数据获取困难、影像缺失、影像重叠度不足、三维模型构建时效性低的问题,本技术在结合传统无人机航线规划和无人机视频流摄影方法的基础上,通过确定复杂地形环境下被摄目标所处空间的几何信息和相关的已知视频摄影参数来解决上述问题。
[0061]
请参阅图1-图7,本技术提供了一种基于无人机视频流航线的复杂地形三维模型构建方法,包括:
[0062]
步骤一:获取现场数据;其中,现场数据包括被摄目标边界长度δx和高度δy;根据现场踏勘,获取被摄目标长度最小值x
min
和最大值x
max
,被摄目标宽度最小值y
min
和最大值y
max
;
[0063]
步骤二:获取已知视频摄影参数;其中,已知视频摄影参数包括无人机飞行高度h、飞行速度vi、航向重叠度p
x
、旁向重叠度py、航线方向和航线类型li;
[0064]
步骤三:根据现场数据和已知视频摄影参数,确定未知视频摄影参数;其中,未知视频摄影参数包括实际地面分辨率gsd以及每一帧视频流影像的提取时间间隔ti、航向间隔d
1-i
和航带间隔d
2-i
;
[0065]
步骤四:根据未知视频摄影参数确定航带数mi和任务时间ti;无人机控制软件结合每条航带两端点值、航带数和航带间隔构建视频流航线,结合已知视频摄影参数实现视频流影像数据采集和字幕信息获取;
[0066]
步骤五:根据已知视频摄影参数、影像数据和字幕信息,提取视频流影像的关联参数,构建三维模型;其中,关联参数包括视频流影像提取的起始时间ts和结束时间te、视频流影像数量ni、航点轨迹p、视频流影像帧序号numi以及对应提取每一帧视频流影像坐标信息(x
lon
,y
lat
,z
alt
)。
[0067]
在一个实施例中,步骤一现场数据的获取包括:
[0068]
s101:通过公式δx=x
max-x
min
确定被摄目标边界长度δx;其中,δx、x
max
和x
min
的单位均为m;
[0069]
s102:通过公式δy=y
max-y
min
确定被摄目标边界宽度δy;其中,δy、y
max
和y
min
的单位均为m。
[0070]
在一个实施例中,步骤二中无人机飞行高度h通过现场踏勘和实际地形结合获取;
飞行速度vi、航向重叠度p
x
和旁向重叠度py根据实际情况设置;航线方向和航线类型li的获取具体包括:
[0071]
构建以被摄目标边界长度为横坐标、边界宽度为纵坐标的平面坐标系;i用于区分不同方向的航线类型,本技术中i=1时表示竖直方向航线类型,i=2时表示水平方向航线类型,且本技术中所有的i含义均一致;
[0072]
当i=1,表示平面坐标系中航线方向由边界长度最小值、宽度最小值呈竖直折线方向指向边界长度最大值、宽度最大值,即:(x
min
,y
min
)
→
(x
max
,y
max
),则l1表示竖直方向航线类型;
[0073]
当i=2,表示平面坐标系中航线方向由边界长度最小值、宽度最大值呈水平折线方向指向边界长度最大值、宽度最小值,即:(x
min
,y
max
)
→
(x
max
,y
min
),则l2表示水平方向航线类型。
[0074]
在一个实施例中,步骤三中未知视频摄影参数的确定包括:
[0075]
s301:通过公式确定实际地面分辨率gsd;其中被摄目标实际地面分辨率gsd的单位为cm/px;δ为视频流影像像元尺寸大小,单位为mm;h为无人机与被摄目标的飞行高度,单位为m;f为摄影镜头焦距,单位为mm;
[0076]
s302:通过公式组分别获取无人机镜头纵向视场角fovw和横向视场角fov
l
;其中纵向视场角fovw和横向视场角fov
l
的单位是
°
;cmos_l和cmos_w分别为镜头传感器实际长度和宽度,单位为mm;
[0077]
s303:通过公式组确定每一帧视频流影像的提取时间间隔ti;其中每一帧视频流影像的提取时间间隔ti,单位为s;航向重叠度p
x
和旁向重叠度py通过百分数表示;vi为无人机飞行速度,单位为m/s;
[0078]
s304:通过公式组计算航向间隔d
1-i
,其中航向间隔d
1-i
的单位为m;
[0079]
s305:通过公式组计算航带间隔d
2-i
;其中航带间隔d
2-i
的单位为m。
[0080]
在一个实施例中,步骤四中构建视频流航线包括:
[0081]
s401:根据航线方向和航线类型li,通过公式组计算航带数mi;其中,航带数mi的单位为条;
[0082]
s402:根据航线方向和航线类型li,通过公式组确定任务时间ti;其中任务时间ti的单位为min;
[0083]
s403:航向方向、航线类型和航带数结合无人机控制软件,逐一确定每条航带的两端点值;根据航带间隔、飞行速度控制无人机至每一航带,构建视频流航线,实现视频流影像数据采集和字幕信息获取;其中,字幕信息包括每一帧视频流影像的拍摄参数和坐标位置。
[0084]
在一个实施例中,步骤五中构建无人机视频流影像的三维模型,包括:
[0085]
s501:根据航线方向航线类型li和s303确定的提取时间间隔ti,通过公式组计算提取视频流影像数量ni;其中提取视频流影像数量ni的单位为张;ts和te分别为提取视频流影像起始和结束时间,单位为s;
[0086]
s502:根据航线方向航线类型li、航带数mi和提取时间间隔ti确定航点轨迹p,包括:
[0087]
当i=1,对应航线方向和航线类型l1,航带数m1和提取时间间隔t1;
[0088]
且当航带数m1为奇数,则:
[0089]
p(j,k)=(x
min
+(j-1)
×d2-1
,y
min
+(k-1)
×d1-1
);
[0090]
当(y
min
+(k-1)
×d1-1
)>y
max
时,则p(j,k)=(x
min
+(j-1)
×d2-1
,y
max
);其中,j=1,2,3,
…
,m1+1,k=1,2,3,
…
,n1+2;
[0091]
当航带数m1为偶数,则:
[0092]
p(j,k)=(x
min
+(j-1)
×d2-1
,y
max-(k-1)
×d1-1
);
[0093]
当(y
max-(k-1)
×d1-1
)<y
min
时,则p(j,k)=(x
min
+(j-1)
×d2-1
,y
min
);其中,j=1,2,3,
…
,m1+1,k=1,2,3,
…
,n1+2;
[0094]
当i=2,对应航线方向和航线类型l2,航带数m2和提取时间间隔t2;
[0095]
且当航带数m2为奇数,则:
[0096]
p(j,k)=(x
min
+(k-1)
×d1-2
,y
max-(j-1)
×d2-2
);
[0097]
当(x
min
+(k-1)
×d1-2
)>x
max
时,则p(j,k)=(x
max
,y
max-(j-1)
×d2-2
);其中,j=1,2,
3,
…
,m2+1,k=1,2,3,
…
,n2+2;
[0098]
当航带数m2为偶数时,则:
[0099]
p(j,k)=(x
max-(k-1)
×d1-2
,y
max-(j-1)
×d2-2
);
[0100]
当(x
max-(k-1)
×d1-2
)<x
min
时,则p(j,k)=(x
min
,y
max-(j-1)
×d2-2
);其中,j=1,2,3,
…
,m2+1,k=1,2,3,
…
,n2+2;
[0101]
s503:根据航线方向航线类型li和s501确定的提取影像数量ni,通过公式组:
[0102][0103]
确定提取视频流影像帧序号numi;其中,frame_rate为视频流帧率,单位为fps;
[0104]
s504:视频流影像帧序号和字幕信息进行匹配,确定每一帧视频流影像的坐标信息(x
lon
,y
lat
,z
alt
)。
[0105]
根据实际地形,控制无人机按照两种航向方向和航线类型进行飞行,获取视频流影像和字幕信息;再结合每一帧视频流影像的坐标信息构建三维模型。
[0106]
请参阅图2-图7,进一步对本技术进行说明,本实施例选取某山区高山峡谷复杂地形环境下的泥石流沟谷,进行现场踏勘后,采用大疆mavic2pro无人机根据设定的不同航线方法进行数据采集,采用contextcapturesmart3d软件进行数据处理、三维模型构建、模型纹理细节和精度评定;本实施例具体步骤包括:
[0107]
步骤一:确定泥石流沟谷边界长度δx和宽度δy;利用“发明内容”中的步骤s101和s102,根据现场踏勘,泥石流沟谷整体边界长度δx约为2320m,宽度δy约为362m,泥石流沟谷整体呈条带状分布,为方便视频航线摄影参数计算,假设泥石流沟谷边界长度最小值x
min
为0m、x
max
最大值为2320m,边界宽度最小值y
min
为0m、y
max
最大值为355m。
[0108]
步骤二:确定已知视频摄影参数;根据现场踏勘,为确保飞行安全,无人机飞行高度h为300m;为了确保获取清晰的影像,以及飞行安全和提高工作效率,确定飞行速度vi为15.4m/s;参照规范要求,航向重叠度不低于60%、旁向重叠度不低于30%,因此,航向重叠度p
x
和旁向重叠度py均为80%;确定航线方向和航线类型li,两类视频流航线类型如图2所示,两类视频流航线重叠度示意如图3所示。
[0109]
步骤三:确定未知视频流摄影参数;利用“发明内容”中的步骤s301确定泥石流沟谷实际地面分辨率gsd为10.05cm/px;由于无人机视频得到的帧影像是通过压缩拍照模式获取的单张影像得到,分辨率降低,但地面实际覆盖范围并未有所改变,通过拍照影像计算得到的地面分辨率为7.05cm/px,二者差异较小;根据确定的已知视频摄影参数,再利用“发明内容”中的步骤s302-s306的推导公式,计算出对应航线类型下的每一帧视频流影像的提取时间间隔ti、航向间隔d
1-i
和航带间隔d
2-i
;由于在飞行高度h下,视频流影像对应地面实际覆盖宽度大于泥石流沟谷边界宽度,对于l2和l2两类航线方向和类型,无论采取何种方式,一条视频流航线即可实现泥石流沟谷的全覆盖;因此,在垂直航线方向和航线类型下每一帧视频流影像的提取时间间隔为3.34s、航向间隔51.46m、航带间隔为0m;当影像对应地面实际覆盖长度和宽度都无法满足被摄目标的边界长度和宽度时,两类不同视频流航线类型的模拟航迹如图4所示。
[0110]
步骤四:根据步骤三确定的未知视频摄影参数,利用“发明内容”中的步骤s401、s402推导公式,可确定航带数、每条航带两端的坐标、任务时间,以此再利用“发明内容”中的步骤s403,利用商业无人机控制软件中的视频录制和字幕信息自动获取功能,逐一确定每条航带的两端点,根据步骤二确定的飞行速度为15.4m/s,操纵无人机至该航带,构建视频流航线,实现视频流影像数据的采集和字幕信息的获取,视频流影像数据总时长为201s,任务总时长为8min。
[0111]
步骤五:根据步骤二和步骤四确定的已知视频摄影参数和得到的无人机视频流影像和字幕信息,确定提取视频流影像的起始时间为1/30s、提取视频流影像结束时间为201s、提取影像数量为61张、提取影像帧序号为dji_0936_1.jpg、dji_0936_101.jpg、
…
、dji_0936_6001.jpg,对应提取每一帧视频流影像的坐标信息,实现三维模型构建。
[0112]
步骤六:视频流航线评价分析。本技术以不同航线下构建的三维模型为出发点,从影像实际重叠度、模型细节纹理、模型精度和模型构建耗时四个角度实现多航线的评价分析。
[0113]
本实施例中提出采用影像面积比值的方法计算按照影像帧序号提取得到的影像实际重叠度,并与步骤二中确定的航向重叠度和旁向重叠度进行比较,分析提取得到的影像重叠度的准确性。为实现影像重叠度的计算,首先,利用sift算法对影像进行特征点的提取和匹配,计算初始单应性变换矩阵;然后,运用ransac算法对提取的影像匹配特征点进行单应性变换矩阵优化,实现影像拼接;最后,利用相交多边形部分的面积与原始图片面积进行比值,影像重叠度计算通过matlab编程实现。由于视频航线中只有一条航线,只需对航向重叠度进行比较,因此,分别在航向重叠度设置为70%、80%和90%的情况下,对提取的影像实际重叠度进行计算,并与设置的标准值进行比较。
[0114]
通过计算统计得到,提取影像实际重叠度计算结果如表1:
[0115]
表1不同航向重叠度设置下提取影像实际重叠度计算结果统计单位/%、张
[0116][0117]
由表1统计结果得到,采用本技术提出的视频流航线方法可以准确地确定相关摄影参数,同时,对于不同重叠度下提取得到的影像实际重叠度计算结果相对精度优于90%,采用本技术提出的提取视频流影像计算方法能实现获取准确地每一帧影像,在满足重叠度的要求下,有效改善了数据冗余的情况。
[0118]
为实现不同航线类型的评价,采用无人机航线规划软件,实现泥石流沟谷竖直和井字形交叉航线的规划,两类航线飞行高度360m、航向重叠度为80%、旁向重叠度为80%、拍照间隔4.2s,两类航线获取影像84张和188张,任务总时长为10min和24min。结合本技术中的视频流航线,不同视频流航线实际执行示意如图5所示。
[0119]
利用contextcapturesmart3d软件进行数据预处理,之后构建不同航线下的三维模型,不同航线下构建的三维模型如图6所示,从地面和泥石流沟谷两侧滑坡体模型细节纹理两方面进行模型分析,不同航线下模型细节纹理对比如图7所示,对比分析得到,采用视
频流航线由于实际飞行航高的降低,泥石流沟谷两侧的山体三维模型出现一定的缺失,在排除数据获取时受自然光线影响的情况下,整体上三维模型地面部分未出现空洞现象,能充分保留泥石流沟谷和沟谷两侧滑坡体的细节信息。
[0120]
本技术提出采用布设地面标靶的方式来探讨三维模型的精度,均匀的在滑坡体边界范围内布设5个地面标靶(标靶长:76.00cm、标靶宽:52.00cm),使用精度为0.1mm的刻度尺量取标靶的长、宽和对角线长度作为实际值;其次,从模型上获取均匀分布的5个地面标靶相对应的长度值作为测量值,最后,通过计算其均方根误差,对模型精度进行评价,中误差计算公式为:式中,rmse
x
为均方根误差、n为标靶个数、δl
xi
为3种测量方式的测量误差、l
′
xi
为模型测量值、l
xi
为实际测量值。
[0121]
通过计算统计得到,模型误差精度统计如表2所示:
[0122]
表2不同航线类型三维模型误差精度统计单位/cm
[0123][0124]
由表2统计数据对比分析得到,采用本技术提出的视频流航线方法可以准确地确定相关摄影参数,同时,构建得到的三维模型精度与传统无人机航线规划方法相比并未有明显的差异,采用视频流航线的竖直方向的航线类型适用性较强,同时也能获取具有可量测性、精度较高的三维模型。
[0125]
不同航线类型下均可实现构建整体性好、细节纹理保留完整、精度较高的三维模型。本技术提出对不同航线类型下数据采集时长t
collection
、数据预处理时长t
process
和三维模型构建时长t
modeling
进行统计,探讨不同航线类型构建三维模型的时效性。本技术中所用试验设备电脑配置为intel(r)core(tm)i7-8750h cpu@2.20ghz、32g运行内存、gtx 1050ti显卡。
[0126]
通过统计得到,不同航线类型构建三维模型耗时统计如表3所示:
[0127]
表3不同航线类型构建三维模型耗时统计结果单位/min、张
[0128][0129]
由表3计结果对比得到,采用本技术提出的视频流航线方法可以实现影像数据的快速获取,同时,在确保得到完整性较高、具有可量测性的三维模型的前提下,采用视频流航线从数据采集、预处理到构建三维模型所用时长最短,整体时效性有了明显提升。
[0130]
本发明针对复杂地形环境,提出了一种基于无人机视频流航线的复杂地形三维模型构建方法,采用本技术提出的方法能严密准确的确定视频流航线相关视频摄影参数,准
确地提取出满足重叠度要求的每一帧视频流影像,数据获取方式丰富,数据冗余出现的情况减少,得到最优数据量,并且采用视频流航线能高效、快速的构建细节纹理信息保存完整、具有测量精度较高的三维模型。
[0131]
上述公式中的部分数据均是去除量纲取其数值计算,公式是由采集的大量数据经过软件模拟得到最接近真实情况的一个公式;公式中的预设参数和预设阈值由本领域的技术人员根据实际情况设定或者通过大量数据模拟获得。
[0132]
以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1