激光雷达及其探测方法与流程
本公开涉及激光雷达,尤其涉及一种激光雷达及其探测方法。
背景技术:
1、激光雷达是一种常用的测距传感器,广泛应用于无人驾驶、智能机器人、无人机、军事武器等领域,具有探测距离远、分辨率高、抗干扰能力强、体积小、质量轻等优点。激光雷达基于飞行时间法(time of flight,tof)对障碍物进行测距,即通过发射探测脉冲,测量探测脉冲在激光雷达和障碍物之间往返的飞行时间进行测距。为了实现更精确的探测扫描,激光雷达的点云密度越来越高,即在相同时间内需要发射更多的探测信号,因此需要多通道同时发光,并行测量,这导致了很棘手的通道间串扰问题。
2、以nl线的激光雷达(即激光收发的通道数为nl)为例进行说明。每个通道的探测窗口为tch,即分配给每个通道的测量时间。tch的计算方法为:tch=tof+多脉冲编码时间+通道切换时间,其中tof=2*lmax/c,lmax为最大探测距离,c为光速;通道切换时间一般为200ns左右;多脉冲编码时间一般取100ns*脉冲个数。重复扫描周期为t,即完成所有通道测量的最小时间,并以t为周期执行所有通道的重复扫描。
3、在每个重复扫描周期内,最多只能扫描个通道,因此要完成nl个通道的扫描,需要并行测量的通道数对于lmax=200m的激光雷达来说,需要8个通道并行测量。
4、现有的激光雷达的探测方法如图1所示,以4个探测通道并行测量为例(nch=4),4个探测通道并行发光(如图1所示,并行发射四个探测脉冲pulse1、pulse2、pulse3和pulse4),并激活探测器以接收回波信号(如图1所示,四个通道的探测器均在tch内激活),在tch时间后探测器关闭,切换到下一组的4个探测通道。以δtch表示相邻的两个探测通道的测量时间差,图1的方法中,δtch等于或大于tch。若某一探测通道存在近距离高反射率物体,反射的回波信号就很有可能在其他探测通道产生串扰,造成鬼像(被干扰通道产生一个并不存在的数据点)。如图1所示,在同一时刻,四个通道ch1、ch2、ch3和ch4的激光器发射出探测脉冲pulse1、pulse2、pulse3和pulse4,分别经历飞行时间tof1、tof2、tof3和tof4之后,激光雷达四个通道的探测器分别接收到回波echo1、echo2、echo3和echo4,其中由于第二通道探测到的障碍物的距离较近,所以最先接收到回波echo2,该回波echo2会在其他通道的探测器上产生串扰,如图1所示的。尤其是那些与第二通道较为接近的通道,受到的干扰更大。
5、另一方面,受激光雷达的重复扫描周期和每次测量的时间片tch限制,随着点云数据率越来越高,探测范围越来越远,就需要更多的探测通道同时发光、并行测量。一般测距能力为200m的雷达,需要8个并行探测通道,无论是硬件资源还是测量时间资源都非常紧张,同时使得多个同时测量的探测通道间串扰问题更为棘手。
6、背景技术部分的内容仅仅是公开发明人所知晓的技术,并不当然代表本领域的现有技术。
技术实现思路
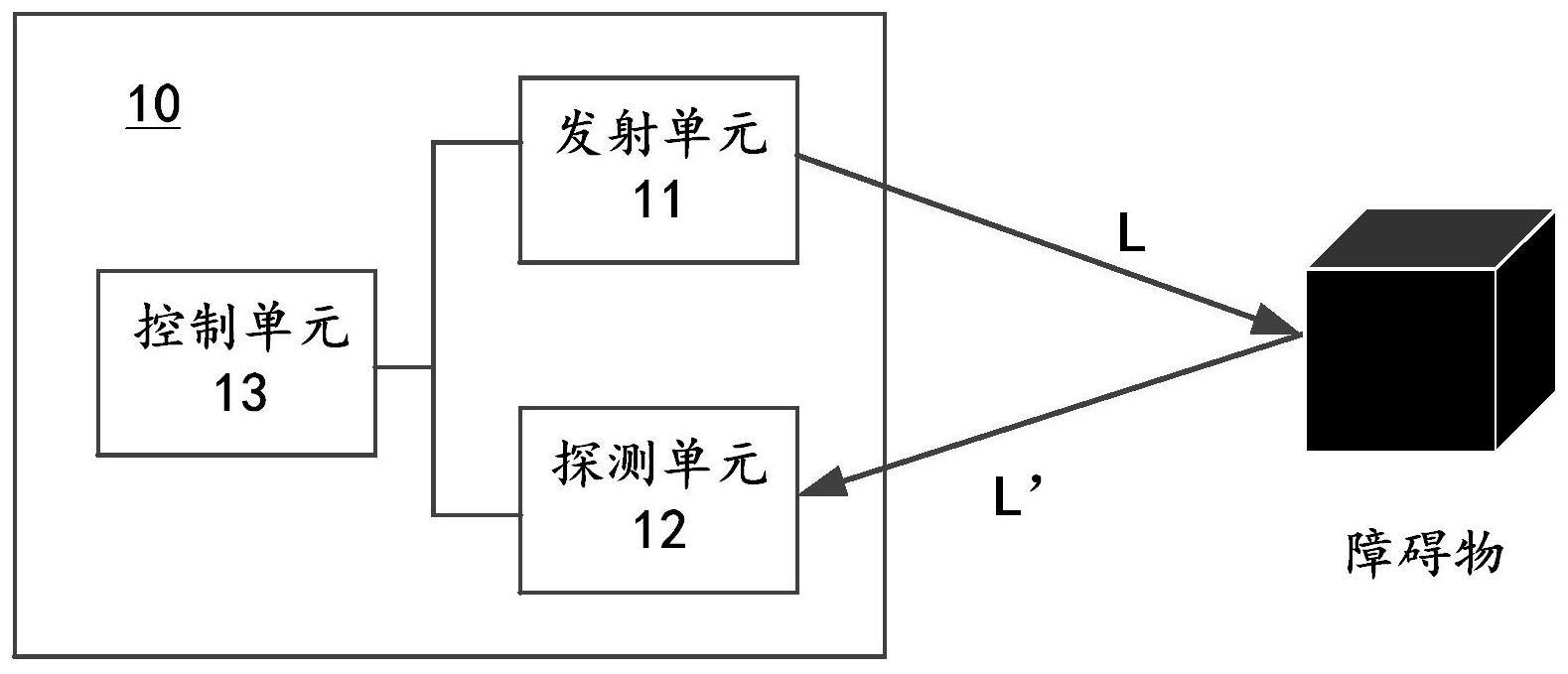
1、有鉴于现有的一个或多个缺陷,本发明提供一种激光雷达,包括:
2、发射单元,所述发射单元包括至少一个激光器,配置成发射探测信号;
3、探测单元,包括至少一个探测器,配置成可在探测窗口内接收回波信号;
4、控制单元,配置成控制所述发射单元发射相邻两个探测信号的时间差小于所述探测窗口,并根据与所述探测信号相对应的所述回波信号计算障碍物的距离。
5、根据本发明的一个方面,其中所述激光器配置成以所述时间差为间隔发射相邻的探测信号。
6、根据本发明的一个方面,其中所述发射单元包括多个激光器,至少两个激光器配置成以所述时间差为间隔分别发射探测信号。
7、根据本发明的一个方面,所述发射单元包括多个激光器组,每个激光器组包括多个激光器,不同激光器组以上述时间差为间隔分别发射探测信号。
8、根据本发明的一个方面,其中所述至少一个激光器与至少一个探测器分别形成探测通道,所述探测窗口的时间间隔由所述激光雷达的最大探测距离、探测信号编码时间和探测通道切换时间中的一个或多个确定。
9、根据本发明的一个方面,其中所述时间差不大于所述探测窗口的1/2。
10、根据本发明的一个方面,其中所述控制单元配置成:判断所述回波信号是否与所述探测信号相对应,并根据发射所述探测信号与接收相对应的回波信号的时间间隔计算障碍物的距离。
11、根据本发明的一个方面,其中所述控制单元基于所述回波信号的信号特征是否与所述探测信号的信号特征相匹配,判断所述回波信号是否与所述探测信号相对应,所述信号特征包括:脉冲时间间隔、脉冲宽度、脉冲幅度和波长中的一种或多种的组合。
12、根据本发明的一个方面,其中所述控制单元配置成通过以下方式判断所述回波信号是否与所述探测信号相对应:
13、获取所述回波信号的接收时刻以及所述回波信号在所述探测单元上的光斑位置;和
14、根据所述接收时刻以及光斑位置,确定所述回波信号是否与所述探测信号相对应。
15、根据本发明的一个方面,其中所述控制单元配置成通过以下方式确定所述回波信号是否与所述探测信号相对应:
16、根据所述光斑位置,获取所述回波信号的第一飞行时间;
17、根据所述接收时刻与探测信号的发射时刻之间的时间间隔,获得第二飞行时间;
18、当所述第一飞行时间与所述第二飞行时间相接近时,确定所述回波信号与所述探测信号对应。
19、根据本发明的一个方面,其中所述控制单元配置成通过以下方式根据光斑位置获取所述第一飞行时间:
20、确定所述光斑位置相对于基准位置的偏移量;
21、根据所述偏移量,获取所述第一飞行时间。
22、根据本发明的一个方面,其中所述控制单元配置成通过以下方式根据光斑位置获取所述第一飞行时间:
23、基于预设的飞行时间与光斑位置的对应关系,获得所述光斑位置对应的第一飞行时间。
24、根据本发明的一个方面,其中所述控制单元配置成通过以下方式确定所述回波信号是否与所述探测信号相对应:
25、根据所述接收时刻与探测信号的发射时刻之间的时间间隔,获得第二飞行时间;
26、根据所述第二飞行时间,获得与该第二飞行时间相对应的预期光斑位置;
27、当所述光斑位置与所述预期光斑位置相接近时,确定所述回波信号对应于所述探测信号。
28、根据本发明的一个方面,其中所述控制单元配置成通过以下方式根据第二飞行时间获得预期光斑位置:基于预设的飞行时间与光斑位置的对应关系,获得所述第二飞行时间对应的预期光斑位置。
29、根据本发明的一个方面,其中所述预设的飞行时间与光斑位置的对应关系基于以下一个或多个因素确定:
30、所述激光雷达的旋转产生的光斑位置偏移;
31、所述激光雷达的扫描装置偏转产生的光斑位置偏移;
32、障碍物的距离产生的光斑位置偏移。
33、根据本发明的一个方面,其中所述探测器包括多个探测单元,将接收到所述回波信号的多个探测单元的几何质心,作为所述光斑位置。
34、本发明还涉及一种激光雷达的探测方法,所述探测方法包括:
35、s101:计算或获得所述激光雷达的探测窗口的时间间隔;
36、s102:根据所述探测窗口设置发射相邻两个探测信号的时间差,使所述时间差小于所述探测窗口;
37、s103:以所述时间差为间隔发射相邻的探测信号;
38、s104:在所述探测窗口内接收回波信号;
39、s105:根据所述回波信号计算障碍物的距离。
40、根据本发明的一个方面,其中所述激光雷达的至少一个激光器与至少一个探测器分别形成探测通道,所述探测窗口的时间间隔由所述激光雷达的最大探测距离、探测信号编码时间和探测通道切换时间中的一个或多个确定。
41、根据本发明的一个方面,其中所述时间差不大于所述探测窗口的1/2。
42、根据本发明的一个方面,其中所述步骤s103包括:控制单个激光器以所述时间差为间隔发射相邻的探测信号;或者控制至少两个激光器以所述时间差为间隔分别发射探测信号。
43、根据本发明的一个方面,其中所述步骤s105包括:判断所述回波信号是否与所述探测信号相对应,并根据发射所述探测信号与接收相对应的回波信号的时间间隔计算所述障碍物的距离。
44、根据本发明的一个方面,其中所述步骤s105包括:基于所述回波信号的信号特征是否与所述探测信号的信号特征相匹配,判断所述回波信号是否与所述探测信号相对应,所述信号特征包括:脉冲时间间隔、脉冲宽度、脉冲幅度和波长中的一种或多种的组合。
45、根据本发明的一个方面,其中所述步骤s105包括通过以下方式判断所述回波信号是否与所述探测信号相对应:
46、获取所述回波信号的接收时刻以及所述回波信号在所述探测单元上的光斑位置;和
47、根据所述接收时刻以及光斑位置,确定所述回波信号是否与所述探测信号相对应。
48、采用本发明的激光雷达及其探测方法,突破tch>tof的限制,可以用较少的并行通道数来获得同样的点云数据率,节省时间资源。尤其是一个通道测程中tof较小的部分接收的回波信号对应的障碍物距离近,回波光强度较高。采用本发明的激光雷达及其探测方法,发射单元发射相邻两个探测信号的时间差小于探测窗口,一个探测窗口经历一定的tof时间后,发射相邻的下一个探测信号,即激活下一个探测窗口,使得每个探测窗口tof较小的时间内并行测量通道数减少,使得容易受到近距离强回波信号的通道减少。另外,并行测量的通道数减少,还可以增大并行测量的通道空间距离,从而明显降低串扰的概率和强度,以获得更准确的探测结果。
- 还没有人留言评论。精彩留言会获得点赞!