一种用于真空深冷环境下的星敏感器光轴热漂移评价方法与流程
1.本发明涉及一种用于真空深冷环境下的星敏感器光轴热漂移评价方法,属于光学仪器技术领域。
背景技术:
2.星敏感器是高分辨率对地观测和天文观测任务中必不可少的空间测量敏感器。随着平台需求的不断提升,星敏感器测量精度的需求也越来越高。其中,精度为0.3
″
星敏感器是世界先进水平的极高精度星敏感器。
3.星敏感器地面环境下的精度评价及测试技术是验证产品实现水平的核心能力。在误差源评价中,0.3
″
星敏感器的低频误差主要由其在轨环境的光轴热漂移程度决定。为评估该产品指标实现情况,亟需在地面环境下建立一种真空深冷环境,实现星敏感器接近在轨工况下的光轴热漂移指标评价。
4.星敏感器的光轴热漂移指受环境影响的星敏成像星点质心位置移动情况,其影响因素包括、真空深冷背景、外热流、安装界面温漂等。
5.目前,星敏感器光轴热漂移的地面评价方式主要采用仿真分析计算得出。通过星敏感器结构三维模型,建立有限元分析模型。设置温度界面后仿真得到星敏感器各部位的温度场和应变场。通过分析结果,计算光学镜头的光轴变化情况,最后得出光轴的热漂移量。这种分析方法可评价星敏感器光轴热漂移的水平,可作为工程研制的参考,但结果受建模准确度的影响较大。
技术实现要素:
6.本发明解决的技术问题是:克服现有技术的不足,提出一种用于真空深冷环境下的星敏感器光轴热漂移评价方法,首先建立一套环境模拟装置,包括真空深冷背景模拟、在轨外热流模拟及产品界面温度水平模拟;其次通过高稳定的支撑装置实现被测品稳定安装,通过高精度星模拟器实现目标模拟,建立高精度检测系统对整个装置的系统误差进行测量,最终通过系统误差修正得出极高精密星敏感器的热漂移情况,解决了星敏感器地面环境下的光轴热漂移指标评价问题。
7.本发明解决技术的方案是:
8.一种用于真空深冷环境下的星敏感器光轴热漂移评价方法,步骤包括:
9.s1、将被测产品安装于外热流模拟系统中,按照需要模拟的空间外热流情况对被测星敏感器进行外热流模拟实施;
10.s2、开启星敏感器,通过控制外热流模拟系统的工况参数设置,实现不同工况外热流的模拟,同时采集不同工况下的星敏感器姿态四元素;
11.s3、对测试过程中采集到的被测产品姿态四元数进行k阶多项式拟合,作为姿态四元数的理论值;
12.s4、将每个采样点的姿态四元数与拟合的姿态四元数进行叉乘,计算出误差四元
数;
13.s5、将计算得到的误差四元数转换为星敏感器测量参考系三个轴上的角度误差;
14.s6、对一个轨道周期的三轴角度误差进行平滑处理,提取其偏置变化,计算其角度误差的标准差e
bs
;
15.s7、基于一个轨道周期的偏差变化计算其标准差e
bs
,最终统计光轴热漂移指标。
16.进一步的,s1中,在被测星敏感器表面布设多路加热回路并采集温度,进行外热流模拟。
17.进一步的,外热流模拟系统包含真空设备、热沉、光学平台、液氮装置和星模拟器,用于真空深冷背景模拟、在轨外热流模拟及产品界面温度水平模拟。
18.进一步的,真空设备提供深孔深冷环境模拟,真空度为1.3
×
10-3
pa。
19.进一步的,真空设备内壁上设计热沉,可进行液氮致冷,致冷温度为100k。
20.进一步的,真空设备内部设置稳定的光学平台,平台上表面平面稳定度优于0.2
″
/℃。
21.进一步的,在真空设备内建立稳定的恒星模拟器,模拟单星、多星功能。
22.进一步的,恒星模拟器工作谱段:250nm~2500nm,单星张角为10
″
,模拟星点范围4~8mv,星模拟器的稳定性优于0.5
″
/24h。
23.进一步的,在光学平台表面,实施温度界面模拟,实现被测产品的界面温度在-40℃~+50℃范围内可设置,保证界面温度梯度小于1℃。
24.进一步的,s6中,对一个轨道周期的三轴角度误差进行平滑处理,点数不小于1/50轨道周期。
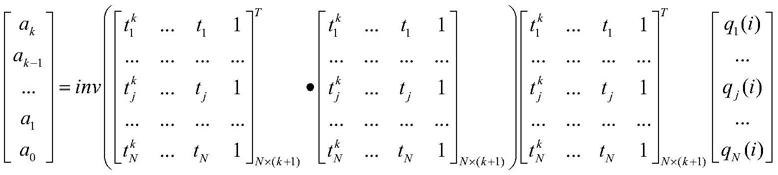
25.进一步的,s3中对测试过程中采集到的被测产品姿态四元数进行k阶多项式拟合,作为姿态四元数的理论值;
[0026][0027][0028]
其中i=1,2,3,4,分别表示四元数q的四个分量;
[0029]
j=1,
…
,n,表示n组测量得到的四元数;
[0030]
[q(1) q(2) q(3) q(4)]表示拟合得到的四元数;
[0031]
[a
k a
k-1
...a
1 a0]表示拟合参数,t表示时间。
[0032]
进一步的,s4中,误差四元数
[0033]
式中:
[0034]qt
为星敏感器计算出的t时刻姿态四元数测量值;
[0035]
为多项式拟合得到t时刻姿态四元数;
[0036]qt-1
=[-q
t
(1)
ꢀ‑qt
(2)
ꢀ‑qt
(3) q
t
(4)],其中,q
t
(4)为四元素的标量部分。
[0037]
进一步的,s5中,将计算得到的误差四元数转换为星敏感器测量参考系三个轴上的角度误差
[0038]
φ
t
=2*δq
t
(1)*180*3600/π
[0039][0040]
θ
t
=2*δq
t
(3)*180*3600/π
[0041]
其中φ
t
表示t时刻x轴角度误差,表示t时刻y轴角度误差,θ
t
表示t时刻z轴角度误差。
[0042]
进一步的,s6中,对一个轨道周期的三轴角度误差进行平滑处理,提取其偏置变化,计算其角度误差的标准差e
bs
,
[0043]ebs,φ
=std(φ
t
)
[0044][0045]ebs,θ
=std(θ
t
)
[0046][0047]
进一步的,s7中,基于一个轨道周期的偏差变化计算其标准差e
bs
,最终统计光轴热漂移指标:e
lfe
=mean(e
lsfe
)
±
3*std(e
lsfe
)。
[0048]
本发明与现有技术相比的有益效果是:
[0049]
(1)本发明通过真空环境,外热流模拟设备等,将空间真空深冷背景、产品界面热场、外热流等综合因素进行有效集成,形成多物理场作用于被测品,其测量结果有效评价了在轨的实际工况对被测品的影响程度;
[0050]
(2)本发明通过对试验室环境振动、大气扰动等因素进行抑制,提高了星敏感器光轴热稳定性测量精度;
[0051]
(3)本发明中各空间环境间为独立闭环控制,通过用户的自我设定,可评价被测品在各类环境条件组合影响下的光漂情况,具有很强的实用性;
[0052]
(4)本发明适用于各类光电产品在复杂条件下的光轴稳定性测试,测试接口具备通用性;
[0053]
(5)本发明提出的一种真空深冷环境星敏感器光轴热漂移评价方法,考虑了空间光电产品在轨遇到典型空间环境,是一种全面的、近似真实的在轨情况地面验证方法;适用范围涵盖了航空、航天等空间工况下的光电产品光学稳定性评估,可满足亚角秒测量精度的被测品需求;具有很强的视场竞争力及应用前景。
附图说明
[0054]
图1为本发明系统整体构成图,
[0055]
其中,1-真空环境模拟系统,2-卫星平台模拟支撑台,3-液氮装置,4-真空罐,5-界面温度控制台,6-星敏感器,7-太阳模拟器,8-真空罐,9-星模拟器。
具体实施方式
[0056]
下面结合实施例对本发明作进一步阐述。
[0057]
建立一套外热流模拟系统,如图1所示,包含真空设备、热沉、光学平台、液氮装置和星模拟器,用于真空深冷背景模拟、在轨外热流模拟及产品界面温度水平模拟;
[0058]
真空设备提供深孔深冷环境模拟,真空度一般为1.3
×
10-3pa,真空容器内壁设计热沉,可进行液氮致冷,致冷温度一般要求为100k;容器内部设置稳定光学平台,平台上表面平面稳定度优于0.2
″
/℃。
[0059]
在真空舱内建立稳定的恒星模拟器,模拟单星、多星功能,工作谱段:250nm~2500nm,单星张角一般为10
″
,模拟星点范围4~8mv等,可调,与光学平台共地基,在真空罐工作条件下,星模拟器的稳定性优于0.5
″
/24h;
[0060]
在光学平台表面,实施温度界面模拟,实现被测产品的界面温度在-40℃~+50℃范围内可设置,保证界面温度梯度小于1℃;
[0061]
通过在被测星敏感器表面布设多路加热回路并进行温度采集,建立外热流模拟,实现温度模拟及测量系统的测温精度
±
0.1℃。
[0062]
(1)将被测产品安装于外热流模拟系统中,按照需要模拟的空间外热流情况对被测星敏感器进行外热流模拟实施。
[0063]
(2)开启星敏感器,通过控制外热流模拟系统的工况参数设置,实现不同工况外热流的模拟,同时采集不同工况下的星敏感器姿态四元素。
[0064]
(3)对测试过程中采集到的被测产品姿态四元数进行7阶多项式拟合,作为姿态四元数的理论值;
[0065][0066][0067]
其中i=1,2,3,4,分别表示四元数q的四个分量;
[0068]
j=1,
…
,n,表示n组测量得到的四元数;
[0069]
[q(1)q(2)q(3)q(4)]表示拟合得到的四元数;
[0070]
[a
7 a6...a
1 a0]表示拟合参数,t表示时间
[0071]
(4)将每个采样点的姿态四元数与拟合的姿态四元数进行叉乘,计算出误差四元数:
[0072][0073]
式中:
[0074]qt
为星敏感器计算出的t时刻姿态四元数测量值;
[0075]
为7阶多项式拟合得到t时刻姿态四元数;
[0076]qt-1
=[-q
t
(1)
ꢀ‑qt
(2)
ꢀ‑qt
(3) q
t
(4)],其中,q
t
(4)为四元素的标量部分。
[0077]
(5)将计算得到的误差四元数转换为星敏感器测量参考系三个轴上的角度误差;
[0078]
φ
t
=2*δq
t
(1)*180*3600/π
[0079][0080]
θ
t
=2*δq
t
(3)*180*3600/π
[0081]
其中φ
t
表示t时刻x轴角度误差,表示t时刻y轴角度误差,θ
t
表示t时刻z轴角度误差。
[0082]
(6)对一个轨道周期的三轴角度误差进行平滑处理,点数不小于1/50轨道周期,提取其偏置变化,计算其角度误差的标准差e
bs
;
[0083]ebs,φ
=std(φ
t
)
[0084][0085]ebs,θ
=std(θ
t
)
[0086][0087]
(7)基于一个轨道周期的偏差变化计算其标准差e
bs
,最终统计光轴热漂移指标:e
lfe
=mean(e
lsfe
)
±
3*std(e
lsfe
)。
[0088]
本发明通过真空环境,外热流模拟设备等,将空间真空深冷背景、产品界面热场、外热流等综合因素进行有效集成,形成多物理场作用于被测品,其测量结果有效评价了在轨的实际工况对被测品的影响程度;
[0089]
本发明通过对试验室环境振动、大气扰动等因素进行抑制,提高了星敏感器光轴热稳定性测量精度;
[0090]
本发明中各空间环境间为独立闭环控制,通过用户的自我设定,可评价被测品在各类环境条件组合影响下的光漂情况,具有很强的实用性;
[0091]
本发明适用于各类光电产品在复杂条件下的光轴稳定性测试,测试接口具备通用性;
[0092]
本发明提出的一种真空深冷环境星敏感器光轴热漂移评价方法,考虑了空间光电产品在轨遇到典型空间环境,是一种全面的、近似真实的在轨情况地面验证方法;适用范围涵盖了航空、航天等空间工况下的光电产品光学稳定性评估,可满足亚角秒测量精度的被测品需求;具有很强的视场竞争力及应用前景。
[0093]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1