用于压缩雷达数据的方法和系统与流程
1.本公开涉及用于压缩雷达数据的方法和系统。
背景技术:
2.对象探测是各种任务的必要先决条件,特别是在自主驾驶载具中。
3.因此,需要提供有效且可靠的对象探测。
技术实现要素:
4.本公开提供由计算机实现的方法、计算机系统和非暂时计算机可读介质。在说明书和附图中给出了实施方式。
5.在一个方面,本公开涉及一种用于探测载具附近对象的由计算机实现的方法,该方法包括由计算机硬件组件执行(换言之:实施)的以下步骤:从雷达传感器获取雷达数据;根据雷达数据确定雷达数据立方体;将雷达数据立方体提供给神经网络的多个层(例如卷积层或内积);将多个层的输出重采样到载具坐标系中;并根据重采样的输出探测对象。
6.换言之,可以在各个域中获取和处理雷达数据,并且可以将各个域中的数据用于对象探测。
7.根据另一个方面,由计算机实现的方法还包括由计算机硬件组件执行的以下步骤:融合来自多个雷达传感器的数据;并根据融合数据进一步探测对象。
8.根据另一个方面,由计算机实现的方法还包括由计算机硬件组件执行的以下步骤:从摄像头获取摄像头数据;其中,进一步基于摄像头数据探测对象。
9.根据另一个方面,由计算机实现的方法还包括由计算机硬件组件执行的以下步骤:从激光雷达传感器获取激光雷达数据;其中,进一步基于激光雷达数据探测对象。
10.根据另一个方面,由计算机实现的方法还包括由计算机硬件组件执行的以下步骤:基于雷达数据立方体确定到达角。
11.根据另一个方面,其中,使用具有多个层例如多个全连接层的人工网络来探测(换言之:确定)到达角。
12.使用人工网络允许来自校准的结果与特定传感器布置和可能的传感器失对准的独立性。
13.根据另一个方面,其中,人工神经网络还包括随机失活(dropout)层。随机失活层可以增加处理的鲁棒性。
14.根据另一个方面,进一步基于回归子网络探测对象。回归网络可以组合来自摄像头、激光雷达传感器和各种雷达域的数据。
15.根据另一个方面,回归子网络包括u形网络和lstm中的至少一种。
16.根据另一个方面,回归子网络包括自我运动补偿模块。自我运动补偿可以使在回归子网络中组合的数据在同一坐标系中提供,即使是组合来自不同时间步的数据。
17.根据另一个方面,自我运动补偿模块对前一时间步的循环网络的输出进行自我运
动补偿,并将自我运动补偿的结果输入到当前时间步的循环网络中。
18.根据另一个方面,自我运动补偿模块执行插值,其中,插值包括最近邻插值并且还包括记录运动的剩余部分。这可以避免位置随时间的漂移(由于位置误差的累积)。
19.在另一个方面,本公开涉及一种用于压缩雷达数据的由计算机实现的方法,该方法包括由计算机硬件组件执行的以下步骤:获取包括多个多普勒区间的雷达数据;确定多个多普勒区间中的哪个多普勒区间表示静止对象;并且基于所确定的表示静止对象的多普勒区间确定经压缩的雷达数据。
20.经压缩的雷达数据可以提供给后续处理,例如提供给人工网络的其他层。可以理解的是,根据具体的需要,可以对人工神经网络进行专门的训练。通过将压缩数据提供给进一步处理,进一步处理可以有效地执行。进一步处理可包括如本文所述的任何处理。
21.根据另一个方面,雷达数据包括数据立方体或阈值数据立方体。
22.根据另一个方面,由计算机实现的方法还包括由计算机硬件组件执行的以下步骤:基于雷达数据确定到达角。
23.根据另一个方面,到达角是使用具有多个层的人工网络确定的。
24.根据另一个方面,确定经压缩的雷达数据包括:将所确定的表示静止对象的多普勒区间组合成距离角度图像;从射束向量中减去距离角度图像。
25.根据另一个方面,经压缩的雷达数据包括多个图像。
26.根据另一个方面,图像表示能量图和速率图中的至少一种。
27.根据另一个方面,经压缩的雷达数据包括速率图;并且速率图是基于斜坡向量确定的。
28.根据另一个方面,斜坡向量包括多个单调递增的条目。
29.根据另一个方面,经压缩的雷达数据包括速率图和能量图;能量图是根据速率图确定的。
30.根据另一个方面,经压缩的雷达数据包括至少一个速率图;并且至少一个速率图是基于运动的、可学习高斯核和可学习正弦核中的至少一种来确定的。
31.根据另一个方面,进一步基于与表示静止对象的多普勒区间相邻的多普勒区间来确定经压缩的雷达数据。
32.根据另一个方面,由计算机实现的方法还包括由计算机硬件组件执行的以下步骤:使用编码器层确定多个经训练的特征。经压缩的数据可以包括经训练的特征。
33.根据另一个方面,由计算机实现的方法还包括由计算机硬件组件执行的以下步骤:基于速率图确定偏差图。经压缩的数据可以包括偏差图。
34.各个方面提供用于低级别传感器数据(例如原始雷达数据)的了机器学习流水线。
35.如本文所述的方法可以从神经网络创建载具探测结果。
36.在另一个方面,本公开涉及一种计算机系统,所述计算机系统包括多个计算机硬件组件,所述多个计算机硬件组件被配置成执行本文描述的由计算机实现的方法的若干或所有步骤。计算机系统可以是载具的一部分。
37.该计算机系统可以包括多个计算机硬件组件(例如处理器(例如处理单元或处理网络)、至少一个存储器(例如存储器单元或存储器网络)、以及至少一个非暂时数据存储部)。应当理解,可以提供并使用另外的计算机硬件组件来在计算机系统中执行计算机实现
的方法的步骤。非暂时数据存储部和/或存储器单元可以包括用于指示计算机执行本文描述的由计算机实现的方法的若干或所有步骤或方面的计算机程序,例如使用处理单元和至少一个存储器单元。
38.在另一个方面,本公开涉及一种载具,所述载具包括所述计算机系统和所述雷达传感器。
39.在另一个方面,本公开涉及一种非暂时计算机可读介质,其包括用于执行本文描述的由计算机实现的方法的若干或所有步骤或方面的指令。计算机可读介质可以被配置成:光学介质,例如光盘(cd)或数字多功能盘(dvd);磁介质,例如硬盘驱动器(hdd);固态硬盘(ssd);只读存储器(rom),例如闪存;等。此外,计算机可读介质可以被配置成可通过数据连接(例如互联网连接)访问的数据存储器。例如,计算机可读介质可以是在线数据储存库或云存储。
40.本公开还涉及一种用于指示计算机执行本文描述的由计算机实现的方法的若干或所有步骤或方面的计算机程序。
附图说明
41.在此结合以下附图描述本公开的示例性实施方式和功能。
42.图1示意性地示出了根据各种实施方式的rador.net的结构;
43.图2示意性地示出了具有多个计算机硬件组件的计算机系统,其被配置成执行根据各种实施方式的用于对象探测的由计算机实现的方法的步骤;
44.图3示意性地示出了根据各种实施方式对雷达数据执行的处理的图示;
45.图4示意性地示出了根据各种实施方式的多天线fmcw雷达布置的图示;
46.图5示意性地示出了根据各种实施方式如何确定数据立方体的图示;
47.图6示意性地示出了根据各种实施方式的网络输入的图示;
48.图7示意性地示出了根据各种实施方式的系统概览的图示;
49.图8示意性地示出了根据各种实施方式的层压缩的图示;
50.图9示意性地示出了图8所示的系统的扩展的图示;
51.图10示意性地示出了根据各种实施方式的用于压缩雷达数据的另一系统的图示;并且
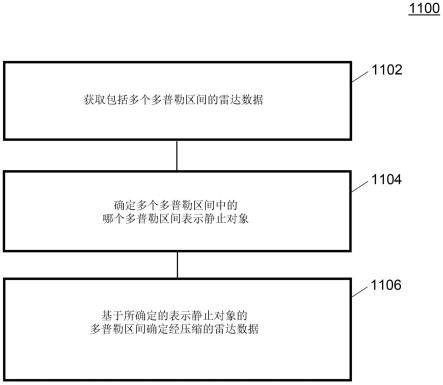
52.图11示意性地示出了根据各种实施方式的用于压缩雷达数据的方法的流程图。
具体实施方式
53.雷达信号处理在其核心与图像处理有许多相似之处。可以使用fft(快速傅立叶变换)来生成距离多普勒图,其中在旁瓣抑制之后,使用可变阈值识别高于局部噪声电平的峰值。这些射束向量可以随后被滤波并且最终可以应用超分辨率角度寻找方法。
54.图3示出了对雷达数据执行的处理的图示300,例如对于调频连续波(fmcw)雷达。fmcw雷达是一种有源传感器,其根据出射波与入射波之间的时间差来测量距离。fmcw雷达产生具有交变频率的连续波(换言之:频率斜坡302,其可被称为啁啾)。对发送信号和接收信号进行缩混产生if(中频)信号。快速时间(1个线性调频脉冲的持续时间)中频信号的频率与目标范围(换句话说:距离)成比例。在长时间(慢时间)上测量的沿多个啁啾的相位变
化与反射体径向运动引起的相对径向多普勒频移成比例。因此,接收到的信号可以被变换成多普勒距离图(map)304,每个天线一个平面。
55.图4示出了多天线fmcw雷达布置的图示400。例示了多个天线402。反射波404以不同的相位撞击不同的天线402。相移在天线阵列上感应出频率,该频率与到达方向(doa)的cos成比例。
56.2d fft(快速傅立叶变换)可以将针对各个天线的输入信号分解为频率分量,从而分解为距离和多普勒。目标在集成的距离多普勒图中可以表现为峰,超过一定能量电平的峰可以用fft/doa估计方法处理,并可以用于探测具有特定距离多普勒值的目标的到达方向。能量可以被提取(rcs),重新缩放以缩放到输出单元系统,并且可以提供如本文较详细描述的视型(looktype)补偿、探测点云生成以及跟踪和对象假设生成。
57.图5示出了如何确定数据立方体的图示500。
58.可以为剩余峰生成经视型补偿的多普勒和距离值以及rcs(雷达截面)值,其形成探测结果列表。探测结果列表可以变换到笛卡尔坐标,并且测量结果可以由跟踪器处理,跟踪器过滤错误并根据闪烁的探测结果以及边界框创建时间稳定的轨迹。深度(人工神经)网络可用于图像处理、语言处理等领域。深度架构已被证明可以为之前的手工算法、特征工程和分类提供卓越的结果。问题是,如何
59.·
将处理的经典形式转化为深度网络;
60.·
如何在环境图上生成边界框;
61.·
寻找射束向量的角度;
62.·
让高级别框假设生成算法访问低级别数据;
63.·
融合多个雷达的数据;以及
64.·
解决域问题(radar在rd空间中工作)。
65.可以提供视型来解决采样问题:信号的采样需要遵守奈奎斯特采样定理,违反奈奎斯特采样定理将在重构的信号中导致歧义。对于距离,可以通过低通滤波去除高于f
sampling
/2的频率来解决该问题。关于多普勒,对不同的扫描(视型)使用不同的分辨率产生不同的模糊结果,然后可以使用时间融合方法(例如跟踪)通过使用同一对象的至少两次探测结果来解决模糊性。在这种上下文中,距离视型是指距离上的不同分辨率,因此也可以获得较精细的分辨率(每第n帧)。例如,数据立方体可以包括不同的分辨率,例如四种不同的分辨率(换言之:四个视型)。
66.根据各种实施方式,可以提供可以被称为rador.net(雷达深度对象识别网络)的网络来解决这些问题。
67.与传统方法相比,各种实施方式可以允许优异的性能并且可以提供由数据驱动的性能增益。
68.图1示出了根据各种实施方式的rador.net的结构100,其可以允许使用来自不同域(例如cdc域118、极域120、vcs(载具坐标系)传感器域122和vcs融合域124)的输入,例如在用于对去往网络102的雷达数据112进行预处理的预处理模块114中。网络102可以包括可以接收摄像头数据104的摄像头子网络106、可以接收激光雷达数据108的激光雷达子网络110以及可以从各个域接收数据的雷达子网络116。
69.在完全的端到端流水线中,仅可以使用来自cdc域118的输入。
70.作为输入,可以使用经3d压缩的数据立方体(cdc)112。该立方体可能是稀疏的,因为所有低于cfar(恒定误报率)电平的射束向量都可能被抑制。射束向量中缺失的天线单元可以被插值。可以应用校准并且可以根据雷达方程来缩放区间值。根据各种实施方式,可以使用未压缩的数据立方体,并且可以利用基于ml(机器学习)的区间抑制方法。
71.来自cdc域118的数据可以在cdc域子网络126中使用。在cdc域子网络126中,在距离多普勒图的各个射束向量上,应用角度寻找网络。该网络可以是mlp(多层感知器),其可以跨所有射束向量共享相同的参数,或者如下面更详细描述的那样更复杂。cdc域子网络126可以创建距离、角度、多普勒立方体,其随后可以用卷积层处理以过滤输入。
72.来自极域120的数据可以被提供到极域子网络128。在极域子网络120中,可以依赖于角度区间(自我速度的不同投影)对多普勒区间进行自我运动补偿。
73.可以使用编码器子网络将多普勒分量压缩成多个特征图。重采样层可以将不同的视型映射到公共表示,并且坐标转换重采样层可以将特征平面从极坐标转换为笛卡尔特征平面输出。为了减轻插值伪影的问题,可以将两个转换组合为一个步骤。
74.这种变换背后的想法是在特征空间中处理更多信息,在特征空间中中对象形状对平移是不变的(例如,可以在该空间的不同空间位置处应用相同的卷积)。
75.可以提供视型变换器130、极坐标到载具坐标系变换器132和自我运动变换器134。
76.来自vcs传感器域122的数据可以被提供给vcs传感器域子网络136。在vcs传感器域子网络136中,可以应用最大池化来融合不同雷达的结果,以生成组合来自所有雷达的观察特征的特征平面。在进一步的实施方式中,可以应用其他融合方法,例如门控融合。可以提供传感器融合模块138。
77.来自vcs融合域124的数据可以被提供给vcs融合域子网络140。
78.各种域子网络126、128、136、140可以被称为雷达子网络116。
79.在回归子网络142中,可以接收来自摄像头子网络106、激光雷达子网络110和雷达子网络116的数据。
80.回归子网络142可以包括u形网络144、lstm(长-短期存储器)146和自我运动变换器148,并且可以提供输出150。
81.u形网络144可以用于探测对象。经自我运动补偿的循环网络(如lstm 146)可用于将多个时间步组合为一个结果。
82.根据各种实施方式的rador.net可以将从一个雷达或更多个雷达输入的数据立方体与对象输出以端到端的方式连接。
83.图2示出了具有多个计算机硬件组件的计算机系统200,其被配置成执行根据各种实施方式的用于对象探测的由计算机实现的方法的步骤和/或根据各种实施方式的用于压缩雷达数据的方法的由计算机实现的方法的步骤。计算机系统200可以包括处理器202、存储器204和非暂时数据存储部206。至少一个摄像头208、至少一个激光雷达传感器210和至少一个雷达传感器212可以被提供作为计算机系统200的一部分(例如如图2所例示),或者可以在计算机系统200的外部提供。
84.处理器202可以执行在存储器204中提供的指令。非暂时数据存储部206可以存储计算机程序,该计算机程序包括可以传送到存储器204然后由处理器202执行的指令。
85.处理器202、存储器204和非暂时数据存储部206可以例如彼此耦接。经由电连接
214,例如,电缆或计算机总线或通过任何其他合适的电气连接来交换电信号。至少一个摄像头208、至少一个激光雷达传感器210和/或至少一个雷达传感器212可以耦接到计算机系统200,例如经由外部接口,或者可以作为计算机系统的一部分提供(换言之:在计算机系统内部,例如经由电连接214耦接)。
86.术语“耦接”或“连接”旨在包括直接“耦接”(例如通过物理链接)或直接“连接”以及间接“耦接”或间接“连接”(例如通过逻辑连接)链接)。
87.应当理解,对于上述方法之一所描述的内容可以类似地适用于计算机系统200。
88.图6示出了根据各种实施方式的网络输入的图示600。例示了距离方向602、距离率(range-rate)方向604、天线方向606。针对固定距离和固定距离率的数据栈,包括针对各种天线的数据,可以被称为射束向量608(也可以被称为数据立方体)。换句话说,数据立方体包含阵列中所有天线的复响应。
89.输入数据可以是数据立方体或阈值数据立方体(其也可以称为经压缩的数据立方体或cdc)。cdc可以仅包含以下射束向量(及其邻居):其中在所有天线上的和超过噪声阈值(例如cfar)。
90.根据各种实施方式,可以提供端到端的可微分cdc压缩。
91.雷达信号预处理可以通过快速减少数据和计算时间来驱动。可以提供用于数据压缩(换言之:减少)的深度学习方法。
92.在深度学习中,可以使用适当的架构将原始数据与高级别结果连接。然后,可以使用反向传播来训练各个层,最后调整网络参数以生成适当的中间结果和最终结果。
93.下面描述的实施方式可以提供如上所述的rador net的修改并且可以用具有数据瓶颈(换言之:具有数据减少或数据压缩)的新前端设计来扩展rador net。根据各种实施方式,可以压缩数据立方体。可以提供框架来生成小的、可解析的和可视化的中间层,这些中间层是端到端可微分的,允许在压缩之前和之后使用网络组件。
94.在雷达处理链中,经缩混和预处理的时域信号被对齐为针对各个天线的2d信号,然后用距离和距离率fft进行处理,以生成针对各个天线的2d平面,其对不同距离和距离率区间的反射具有复响应。然后将平面集成到2d平面中,然后使用运行平均cfar阈值来子选择具有足够能量指示目标的区间。然后使用波束成型来寻找目标的到达方向,距离多普勒区间中的最大值用于连同附加处理步骤一起生成探测结果,该附加处理将区间转化为距离和角度并且生成对于输出所需的附加数据。发送最终探测结果。它们大约占原始立方体数据的1/100000。在该数据瓶颈中,不仅丢失了大量数据,而且还存在以下事实,即探测通常被定义为能量最大值的代表点。此定义可能不符合后续流程步骤的需要。深度学习的概念可能是将低级别数据与高级别输出连接,根据最终需求来优化不同的处理步骤。
95.根据各种实施方式,可以减少数据并且可以传播信息,使得其适合最终需要。根据各种实施方式,提供了一种可扩展、可解析和可微分的表示机制,这不仅是针对工程的有趣特性,而且可微性等特征对于深度学习架构也是必不可少的,因为可以定制压缩之前的处理步骤以满足后续处理步骤的需要。
96.可以通过仅使用基本的数学运算(如加、减、乘和除)来提供可微分性。
97.根据各种实施方式,可以提供具有定义的特性并且高效的第一处理流水线,使得整个处理可以在甚至不需要机器学习加速器的情况下在嵌入式处理器上实现。
98.图7示出了根据各种实施方式的系统概览的图示700。根据各种实施方式,密集立方体或cdc 702可以用作机器学习流水线的输入。第一处理块可以是例如如上所述的af(角度寻找)网络704。然后可以使用层压缩网络706来将立方体压缩成多个图像。这些图像可以表示针对不同距离角度单元的能量或速度,并且可以传播到网络的稍后部分708中的处理(例如,如以上参照rador网络所描述的)。
99.图8示出了根据各种实施方式的层压缩的图示800。可以提供雷达立方体802作为输入。
100.雷达立方体802可以是具有距离、角度和多普勒的维度的三维立方体。块804可以表示多普勒维度上的一维卷积。这些卷积可以在所有距离和角度区间上共享,以使得在各个距离角度位置处在多普勒维度上应用相同的一维卷积。这可以细化和锐化为各个距离角度区间给出的多普勒频谱。
101.首先,可以识别哪些多普勒区间可以表示静止对象(例如基于静止图(map)806),然后将这些区间组合成来自立方体的距离角度图像并从射束向量中减去该条目。
102.雷达传感器可以在其各个接收天线上测量的距离和多普勒(或距离率,其可以是对象的径向速度,其为距离随时间的变化)。所测量的距离和多普勒数据可以以离散方式输出,即以区间的形式输出。各个区间可以覆盖已定义的区段的信息。
103.距离角度图像可以是图像或矩阵,其中单元由距离和角度来进行索引。换句话说,距离角度图像可以包含针对各个距离和角度索引的值。
104.本文使用的射束向量可以理解为多普勒频谱。
105.将区间组合成成来自立方体的距离角度图像并从射束向量中减去该条目的含义因此可以是为了计算速率图和运动能量,将与静止对象对应的多普勒区间减去或清零。
106.剩余的能量被相加以生成运动目标的能量812。此外,可以提供与速率斜坡向量808的加权乘法,其中各个斜坡条目用斜坡值的对应能量加权并且除以所有能量条目的总和。该条目可以计算速度的期望值(例如在速率图810中),因此是减去静止区间之后的平均多普勒速度。
107.静止偏移块814与自我运动补偿有关。根据各种实施方式,不是对雷达立方体802执行自我运动补偿(这可能是昂贵的,因为立方体可能很大,并且可能需要多普勒维度上的索引偏移,对于各个距离和角度具有不同的偏移,这可能会导致大量的内存重新排序),可以通过将依赖于距离和角度的速度偏移添加到速率图中来实现自我运动补偿。速度偏移可以是具有零相对速度的目标(即在相对速度上静止的目标)将具有的绝对速度。
108.作为在能量上的和的速度能量812可以与位移无关。
109.在静止图806中,可以识别表示静止信息的区间。
110.静止偏移814和静止图806两者均可以使用自我速度来定义,并且两者均可以依赖于距离角度。静止偏移814可以由表示相对速度和绝对速度之间的偏移的速度值组成。静止图806可以由标识哪个多普勒区间对应于零绝对速度的区间索引组成。
111.应当理解,图8所例示的方案可以由前面的附加处理步骤来补充。
112.图8所例示的方案经过测试证明当其被用来代替多普勒压缩层时,在经端到端训练的对象探测网络中提供了优良的性能
113.前述的多普勒压缩层是多普勒维度上的一组密集层,用于将多普勒区间缩减到缩
减的特征尺寸。多普勒维度上的该组密集层在所有距离角度区间上共享。
114.根据各种实施方式,多普勒区间的数量可以减少到显著较小的特征数量。
115.前述的特征是由密集层完全学习的,因此不可解析,但能够学习抽象编码。静止图806、速率图810、能量图812是可解析的、有意义的并且被证明表现优良,但是它们是人为设计且固定的。根据各种实施方式,为了获得两全其美的效果,可以提供如图9所示的编码图(map)914。编码图914可以遵循与前述的充分学习的多普勒压缩基本相同的设计,以具有两全其美的效果:有意义的由人类设计的特征的可解析性和学习抽象特征的能力。
116.图9示出了图8中所示系统的扩展的图示900。具有图9中所示的扩展层编码的系统的各种组件可以与图8中所示的系统相似或相同,使得可以使用相同的附图标记并且可以省略重复的描述。
117.在图9所例示的系统中,不仅使用静止区间902来生成层,此外,相邻区间904可以用于生成附加层以覆盖自运动估计不准确或覆盖缓慢运动的目标。可以提供还包括静止对象的邻居的其他静止图906。除了平均速度值之外,还可以确定速度偏差值910(例如通过标准差块或网络908)以表达是否存在具有能量的区间或是否存在多个区间。此外,经端到端训练的编码层912可以对其他层中没有覆盖的信息进行编码并且可以提供编码图914。经端到端训练的编码层912可以允许深度网络传播附加特征信息,这对于深度网络应用可以是有用的。
118.图10示出了根据各种实施方式的用于压缩雷达数据的另一系统的图示1100。多个可学习高斯核1008可以用于压缩雷达立方体1006中的多普勒频谱。在此上下文中,可学习可以意味着高斯核的三个参数(幅度、均值和方差)是可学习的。静止区间索引1004可以确定多普勒区间中的那个多普勒区间表示零绝对速度。运动的、可学习高斯核1012的均值可以随固定区间索引1004的值而移位,以具有核的独立于自我速度的统一表示。运动的、可学习高斯核1012可以创建第一速率图(map)1014。静止的高斯核1008仅可以具有两个可学习的参数,因为均值可以固定到指示零绝对速度的多普勒区间。此外,静止的高斯核1008的方差可以被正则化,例如使用方差正则化1002。这可以意味着在训练期间较高的方差会受到较多的惩罚。静止的可学习高斯核可以创建静止图1010。
119.可以使用可学习正弦核1016来创建另一速率图。可学习正弦核1016可以由具有三个可学习的参数(幅度、频率和相位)的正弦组成。静止区间索引1004可以用于移位相位,使得正弦曲线对于不同的自我速度也具有统一的表示。可学习的正弦核1016可以创建第二速率图1018。
120.在此上下文中,核可以是具有多普勒维度的长度的向量。核的值可以表示由上述可学习参数定义的高斯或正弦函数。对于雷达立方体中的各个距离角度单元,可以计算该距离角度单元的多普勒维度向量与所有核向量的内积。所以对于各个内核,可以得到一个速率图(或静止图),并且最终可以存在与核同样数量的图。
121.图11示出了流程图1100,其例示了根据各种实施方式的用于压缩雷达数据的方法。在1102,可以获取包括多个多普勒区间的雷达数据。在1104,可以确定多个多普勒区间中的哪个多普勒区间表示静止对象。在1106,可以基于所确定的表示静止对象的多普勒区间来确定经压缩的雷达数据。
122.根据各种实施方式,雷达数据可以包括或者可以是数据立方体或阈值数据立方
体。
123.根据各种实施方式,该方法可以还可包括基于雷达数据确定到达角。
124.根据各种实施方式,可以使用具有多个层的人工网络来确定到达角。
125.根据各种实施方式,确定经压缩的雷达数据可以包括:将所确定的表示静止对象的多普勒区间组合成距离角度图像;并从射束向量中减去该距离角度图像。
126.根据各种实施方式,经压缩的雷达数据可以包括或者可以是多个图像。
127.根据各种实施方式,图像可以表示能量图和速率图中的至少一种。
128.根据各种实施方式,经压缩的雷达数据可以包括或者可以是速率图,并且速率图可以基于斜坡向量来确定。
129.根据各种实施方式,斜坡向量可以包括多个单调增加的条目。
130.根据各种实施方式,经压缩的雷达数据可以包括或者可以是速率图和能量图,并且能量图可以是基于速率图确定的。
131.根据各种实施方式,经压缩的雷达数据包括至少一个速率图;并且至少一个速率图是基于运动的、可学习高斯核和可学习正弦核中的至少一种来确定的。
132.根据各种实施方式,可以进一步基于与表示静止对象的多普勒区间相邻的多普勒区间来确定经压缩的雷达数据。
133.根据各种实施方式,该方法还可以包括使用编码器层确定多个经训练的特征。
134.根据各种实施方式,该方法还可包括基于速率图确定偏差图。
135.步骤1102、1104、1106以及上述其他步骤中的各个步骤可以由计算机硬件组件执行,例如由如图2所例示的计算机系统200执行。
136.附图标记列表
137.100 根据各种实施方式的rador.net的结构
138.102 网络
139.104 摄像头数据
140.106 摄像头子网络
141.108 激光雷达数据
142.110 激光雷达子网络
143.112 雷达数据
144.114 预处理模块
145.116 雷达子网络
146.118 cdc域
147.120 极域
148.122 vcs传感器域
149.124 vcs融合域
150.126 cdc域子网络
151.128 极域子网络
152.130 视型变换器
153.132 变换器极-》vcs
154.134 变换器自我运动
155.136 vcs传感器域子网络
156.138 传感器融合模块
157.140 vcs融合域子网络
158.142 回归子网络
159.144 u形网络
160.146 lstm
161.148 自我运动变换器
162.150 输出
163.200 根据各种实施方式的计算机系统
164.202 处理器
165.204 存储器
166.206 非暂时数据存储部
167.208 摄像头
168.210 激光雷达传感器
169.212 雷达传感器
170.214 连接
171.300 雷达数据进行的处理的图示
172.302 频率斜坡
173.304 多普勒距离图
174.400 多天线fmcw雷达布置的图示
175.402 天线
176.404 反射波
177.500 如何确定数据立方体的图示
178.600 根据各种实施方式对网络的输入的图示
179.602 距离方向
180.604 距离率方向
181.606 天线方向
182.608 射束向量
183.700 根据各种实施方式的系统概览的图示
184.702 密集立方体或cdc
185.704 af网络
186.706 层压缩网络
187.708 后面的部分
188.800 根据各种实施方式的层压缩的图示
189.802 雷达立方体
190.804 卷积块
191.806 静止图
192.808 速率斜坡向量
193.810 速率图
194.812 能量图
195.814 静止偏移
196.900 图8所示的系统的扩展的图示
197.902 固定区间
198.904 相邻区间
199.906 进一步静止图
200.908 标准差网络
201.910 速度偏差值
202.912 端到端训练的编码层
203.914 经编码的图
204.1000 根据各种实施方式的用于压缩雷达数据的另一系统的图示
205.1002 方差正则化
206.1004 固定区间索引
207.1006 雷达立方体
208.1008 可学习高斯核
209.1010 静止图
210.1012 运动的可学习高斯核
211.1014 第一速率图
212.1016 可学习正弦核
213.1018 第二速率图
214.1100 例示根据各种实施方式的用于压缩雷达数据的方法的流程图
215.1102 获取包括多个多普勒区间的雷达数据的步骤
216.1104 确定多个多普勒区间中的哪个多普勒区间表示静止对象的步骤
217.1106 基于所确定的表示静止对象的多普勒区间确定经压缩的雷达数据的步骤
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1