一种基于空域滤波的阵形畸变补偿方法
1.本发明属于水声探测与声纳信号处理技术领域,涉及一种基于空域滤波的阵形畸变补偿方法。
背景技术:
2.拖线阵声纳是探测低频、隐蔽性目标的重要工具,在探测过程中需要使用水听器接收的阵列数据,用于估计目标的时频信息和目标入射方位。拖线阵声纳的平台在探测过程中,受各种因素的影响,例如海流扰动、平台转向和阵列变深等,阵元的实际位置与理想线列阵的阵元位置存在畸变。受阵形畸变的影响,阵列目标方位估计性能急剧下降,目标时间方位历程模糊,与实际目标方位存在较大的角度误差。
3.通过在阵列上安装姿态传感器,或者通过其它方法测算获知阵元的位置,获得阵列的真实阵列流形矩阵。在已知真实阵列流形矩阵的基础上,通过阵形畸变补偿,实现水下目标的精确方位估计,对于提高拖线阵声纳的战技性能具有较大的应用价值。
技术实现要素:
4.为了解决现有技术中的上述问题,本发明提供了一种拖线阵声纳波束形成目标方位估计阵形畸变的补偿方法,利用实际阵列流形矩阵和期望阵列流形矩阵设计空域滤波器,利用所得的空域滤波器对接收的阵列信号滤波,从而实现接收阵列数据的阵形畸变补偿。
5.本发明的技术方案为:
6.一种基于空域滤波的阵形畸变补偿方法,包括以下步骤:
7.步骤1:将全空间各方位离散化
8.假设远场平面波信号由水平方向入射至阵列,将全空间各方位离散化,等间隔细分为m个方向,离散化后的入射方向分别为θ1,
…
,θm,
…
,θm,其中m=1,
…
,m,θm∈[-90
°
,270
°
]。在阵形畸变的情况下,每个入射方向的实际方向向量为a(θm),所构成的实际阵列流形矩阵为a=[a(θ1),
…
,a(θm),
…
,a(θm)]。阵列无阵形畸变条件下的方向向量为b(θm),所构成的理想阵列流形矩阵为b=[b(θ1),
…
,b(θm),
…
,b(θm)],此即为期望的阵列流形矩阵。
[0009]
步骤2:迭代计算加权系数和空域滤波器
[0010]
假设阵列接收信号模型为:
[0011]
x(t)=as(t)+n(t)
[0012]
式中x(t)=[x1(t),
…
,xn(t),
…
,xn(t)]
t
,xn(t)是第n个阵元的接收信号,1≤n≤n。s(t)=[s1(t),
…
,si(t),
…
,sd(t)]
t
是d个目标源信号,si(t)是第i个目标源信号,1≤i≤d。n(t)是阵列接收数据的背景噪声。
[0013]
设计加权型最小二乘空域滤波器h∈cn×n,对阵列接收数据进行阵元域滤波,滤波输出y(t)为:
[0014]
y(t)=hx(t)=ha(θ)s(t)+hn(t)
[0015]
空域滤波器对阵列信号的实际响应和期望响应之间的误差e(θm)由下式给出:
[0016][0017]
利用实际响应和期望响应的误差,构造加权型最优化问题如下:
[0018][0019]
其中,w(θm)是每个方向向量的响应加权系数。
[0020]
该最优化问题的解为:
[0021][0022]
其中r=diag[w(θ1),w(θ2),
…
,w(θm)]m×m是由每个方向向量的响应加权系数构成的对角矩阵。
[0023]
通过调节每个方向向量的响应加权系数w(θm),均衡各入射方位的响应误差。采用如下的迭代方式实现。
[0024]
初始值:
[0025]
w0(θm)=1,m=1,
…
,m
[0026]
第k次迭代:
[0027]rk-1
=diag[w
k-1
(θ1),w
k-1
(θ2),
…
,w
k-1
(θm)]
[0028]hk-1
=br
k-1ah
(ar
k-1ah
)-1
[0029]ek-1
(θm)=h
k-1
a(θm)-b(θm),m=1,
…
,m
[0030][0031]
wk(θm)=β
k-1
(θm)[w
k-1
(θm)+ο],m=1,
…
,m
[0032]
式中,ο为接近于0的常数值,目的是避免w
k-1
(θm)=0时,wk(θm)=0。β
k-1
(θm)是第k-1次迭代对加权向量的乘积向量。
[0033]
终止条件:
[0034]
设置迭代次数为k,当k=k时终止迭代。
[0035]
令:
[0036]rk
=diag[wk(θ1),wk(θ2),
…
,wk(θm)]
[0037]hk
=br
kah
(ar
kah
)-1
[0038]
步骤3:利用空域滤波器hk对输入的阵列数据x(t)进行阵形畸变补偿滤波,滤波后的数据y(t)即为阵形畸变补偿后的数据:
[0039]
y(t)=hkx(t)
[0040]
本发明的有益效果:拖线阵声纳的平台在探测过程中,受各种因素的影响,例如海流扰动、平台转向、阵列变深,阵元的实际位置与理想线列阵的阵元位置存在畸变。受阵形畸变的影响,阵列目标方位估计性能急剧下降,目标方位模糊,与实际目标方位存在较大的角度误差。本发明在已知拖线阵声纳真实阵列流形的基础上,通过阵形畸变补偿实现水下目标的精确方位估计,对于提高拖线阵声纳的战技性能具有较大的应用价值。
附图说明
[0041]
图1为平台转向过程中导致阵形畸变的示意图。转向过程中,阵元位于一个圆环和进出圆环的切线上,其中(a)和(b)分别表示平台右转向和平台左转向某一时刻的阵元位置。图中,a点和b点分别是阵列驶出圆环和进入圆环的切点,x0和y0是阵列进入转向圆环所对应坐标系,x和y是阵列驶出转向圆环所对应坐标系。假设阵元数为n,圆环半径为r,转向角度为α。图中以箭头表示平台初始方向和平台最终方向。
[0042]
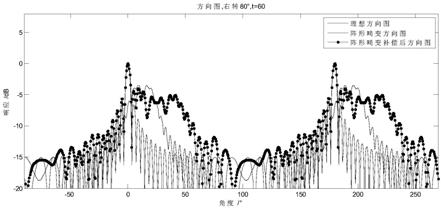
图2为平台转向过程中的波束形成方向图。假设平台转向半径r设定为3链,约555.6m。平台移动速度为10节,约5.1444m/s。拖曳线列阵阵元数n=32,阵元间隔d=8。信号采样频率为4000hz,假设海域的声速为1500m/s,目标频率为阵列的半波长频率93.75hz。假设切入圆环b点的时刻为t=20s,图2中给出了时刻为t=60s时的阵列方向图结果。其中,“.”形状的点虚线表示阵形无畸变条件时的理想方向图结果,
“‑‑”
形状虚折线表示阵列在当前时刻存在阵形畸变条件时的方向图结果,
“‑
.”形状折线表示经过阵形畸变补偿后的方向图结果,迭代次数k=5。
[0043]
图3为平台转向过程中的常规波束形成时间方位历程图。其中,(a)是阵形畸变补偿前(未补偿)的历程图;(b)是阵形畸变补偿后的历程图。图中有两个目标,入射方位分别为15
°
和145
°
,并假定相对于进入转向圆环的切入点b的x0和y0坐标系,目标入射方位不变。采用图2中的仿真条件,设平台右转向80
°
。图3中,带圆圈的折线是15
°
目标及其镜像的轨迹,带+号的折线是145
°
目标及其镜像的轨迹。
具体实施方式
[0044]
以下结合实施例和附图进一步解释本发明的具体实施方式,但不用于限定本发明。
[0045]
一种基于空域滤波的阵形畸变补偿数据处理方法,步骤如下:
[0046]
步骤1:将探测空域[-90
°
,270
°
]离散化,以0.5
°
为间隔细分为m=720个方向。假设平台转向过程中导致阵形畸变的示意图如图1所示,转向过程中,阵元位于一个圆环和进出圆环的切线上。
[0047]
步骤2:计算当前时刻t的方向向量和阵列流形矩阵
[0048]
针对当前时刻t,利用阵元的实时位置,通过各阵元与第1阵元的时延差,测算并获得实时阵列流形矩阵a=[a(θ1),
…
,a(θm),
…
,a(θm)]。利用等间隔线列阵波束形成理论,计算无阵形畸变条件下的理想阵列流形矩阵b=[b(θ1),
…
,b(θm),
…
,b(θm)]。图2作为示例,用于观察方向向量及阵列流形对波束形成方向图的影响。图2分别给出了阵形无畸变条件时的理想方向图结果、存在阵形畸变条件时的方向图结果,和经过阵形畸变补偿后的方向图结果。
[0049]
步骤3:计算当前时刻t的空域滤波器
[0050]
迭代计算加权系数。
[0051]
初始值:
[0052]
w0(θm)=1,m=1,
…
,m
[0053]
迭代:
[0054]rk-1
=diag[w
k-1
(θ1),w
k-1
(θ2),
…
,w
k-1
(θm)]
[0055]hk-1
=br
k-1ah
(ar
k-1ah
)-1
[0056]ek-1
(θm)=h
k-1
a(θm)-b(θm),m=1,
…
,m
[0057][0058]
wk(θm)=β
k-1
(θm)[w
k-1
(θm)+ο],m=1,
…
,m
[0059]
式中,ο为接近于0的常数值,目的是避免w
k-1
(θm)=0时,wk(θm)=0。β
k-1
(θm)是第k-1次迭代对加权向量的乘积向量。
[0060]
终止条件:
[0061]
设置迭代次数为k=5次后终止迭代。令
[0062]rk
=diag[wk(θ1),wk(θ2),
…
,wk(θm)]
[0063]hk
=br
kah
(ar
kah
)-1
[0064]
步骤4:在当前时刻,利用空域滤波器对阵列数据x(t)滤波处理,滤波后的数据y(t)即为阵形畸变补偿后的数据。
[0065]
y(t)=hkx(t)
[0066]
步骤5:针对当前时刻的阵形畸变补偿数据,利用常规波束形成方法计算目标方位估计谱,将当前时刻的方位估计谱绘制到方位历程图中当前时刻位置。图3采用与图2相同的平台转向参数,平台右转向80
°
作为示例,图3中(a)、(b)分别给出了采用未经过阵形畸变补偿的数据和经过空域滤波阵形畸变补偿的数据所得的时间方位历程图。图3中,带圆圈的折线是15
°
目标及其镜像的轨迹,带+号的折线是145
°
目标及其镜像的轨迹。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1