一种平移计算尺及其使用方法
1.本发明涉及航海测绘技术领域,适于在航海绘图作业及教学训练中使用,具体地涉及一种平移计算尺及其使用方法。
背景技术:
2.进行航海测绘计算均需要使用绘制器和绘制工具,目前在航海领域普遍使用的有平行尺、三角板、量角器等。航海过程中,进行绘图计算时,利用现有的平行尺、三角板等虽然能够完成作业任务,但存在诸多缺点,如:平行尺只能实现绘制直线的功能,而不能进行角度的测量导致的不方便;三角板在绘制多条方向线时操作繁琐,而且浪费时间,在绘制方向线的平移过程中也会产生比较大的误差,画出的线的双向性容易导致判断错误,两个刻度可能导致将度数读错,使用方法复杂难学,还需要同时备两把三角板,收藏取用不方便。
3.以上现有的绘算工具,除携带不方便、绘制计算效率较低外,配备多个工具也会带来占用空间大、存储难度大、易丢失、展开和收藏困难等问题。
4.现有技术cn200820159731.0公开了一种航海测绘算盘,主体由两块有机玻璃和一片铝制的活动盘组成,对数计算盘由内盘和外盘组成,内盘和外盘同一圆心,内盘可自由转动,外盘为固定盘。活动标尺一面刻有对数尺,可与活动转盘上的活动标尺配合作对数计算尺使用。实现了体积小重量轻的优势,但是这种测绘算盘设计结构复杂,刻度范围较小,且能够实现的计算功能有限。
技术实现要素:
5.针对现有技术存在的问题,本发明的目的是发挥组合尺规优势,通过拉伸尺设计有效减小占用空间,同时可实现航行时间、航行速度与航行里程的快速计算,还利用分立的拉伸结构,延长刻度范围,灵活嵌入航海中相对运动要素解算,本发明的纸质印刷实施,不但制造成本较低,还利于保存绘算过程。
6.为实现上述目的,本发明提供一种平移计算尺,用于航海测绘,包括底座尺和拉伸尺,所述拉伸尺可相对于底座尺伸出和缩回,其中底座尺包括md根“工”字结构梁,每一根“工”字结构梁都有上沿刻度和下沿刻度,所述拉伸尺包括md-1根“t”形结构梁,每一根“t”形结构梁都有上沿刻度和下沿刻度,“t”形结构梁在底座尺的相邻两个“工”字结构梁之间限定的空间内伸出和缩回移动。
7.进一步,在底座尺和拉伸尺上分别设有第一限位结构和第二限位结构,其中,所述第一限位结构为设置在底座尺上相邻两个“工”字结构梁之间的连接板,第二限位结构为设置在拉伸尺端部的限位块,当拉伸尺伸出到极限位置时,限位块抵靠在连接板上,防止拉伸尺从底座尺中脱出。
8.进一步,在每根“工”字结构梁和“t”形结构梁的下板面标有速度和航程刻度,上板面则标有时间刻度,每一根“工”字结构梁标识两个速度,以sd为起始基准、sdi为速度间隔、sdn为速度增量,时间刻度最大值为td,底座尺和拉伸尺的结合可以实现sd至sd+sdn速度对
应1至td分钟的航程,拉伸尺的第n根的上沿刻度和底座尺的第n根下沿刻度一起表示对应速度下1至td分钟所对应的航程,拉伸尺的第n根下沿刻度与底座尺的第n+1根上沿刻度一起表示对应速度下1至td分钟的航程。
9.另一方面,本发明提供一种平移计算尺,用于航海测绘,包括底座尺、拉伸尺以及平移装置,所述拉伸尺可相对于底座尺伸出和缩回,其中底座尺包括md根“工”字结构梁,每一根“工”字结构梁都有上沿刻度和下沿刻度,所述拉伸尺包括md-1根“t”形结构梁,每一根“t”形结构梁都有上沿刻度和下沿刻度,“t”形结构梁在底座尺的相邻两个“工”字结构梁之间限定的空间内伸出和缩回移动,所述平移装置由设置在底座尺上的“回”字形连接部和滚轮组成,所述平移装置使得计算能够尺沿设定角度平移。
10.进一步,所述“回”字形连接部的空腔内设有第一微齿轮,所述滚轮外部设有第二微齿轮,第一微齿轮与第二微齿轮啮合,使得滚轮能在底座尺的回”字形连接部内自由转动。
11.进一步,所述滚轮包括调节旋钮、滚动轴承和固定棒;调节旋钮与第二微齿轮共圆心连接,第二微齿轮与滚动轴承通过固定棒连接在一起,对调节旋钮施加旋转的力矩,第二微齿轮就会旋转,与“回”字形连接部的第一微齿轮共同调节角度,从而调节滚动轴承滚动的方向。
12.进一步,“回”字形连接部上表面标有角度刻度,每一齿表示2.5
°
,可实现特定角度的转动。
13.本发明还提供一种平移计算尺的使用方法,所述使用方法应用于航海测绘,实现根据已知的速度和时间测算对应的航程;所述方法包括以下步骤:s101.已知速度sd1,用时t1;s102.在底座尺的“工”字结构梁上找到速度sd1对应的位置,确定使用拉伸尺的第n根“t”形结构梁进行测量;s103.将对应速度sd1的第n根“t”形结构梁拉伸到极限位置,使得“t”形结构梁与“工”字结构梁拼接成sd1速度下的完整刻度线,在上板面找到t1刻度,得到对应航程为m1。
14.另一方面,本发明提供一种平移计算尺的使用方法,所述使用方法应用于航海测绘,实现根据已知的速度和时间,在图纸上绘制出表示其航程的线段;所述方法包括以下步骤:s201.已知速度sd2,用时t2;s202.在底座尺的“工”字结构梁上找到速度sd2对应的位置,确定使用拉伸尺的第n根“t”形结构梁进行测量;s203.将对应速度sd2的第n根“t”形结构梁拉伸到极限位置,使得“t”形结构梁与“工”字结构梁拼接成速度sd2下的完整刻度线,在上板面找到t2刻度,得到对应航程为m2。
15.s204.在图纸上沿着拉伸尺和底座尺找到表示速度sd2的“t”形结构梁和“工”字结构梁,沿其速度sd2对应的上刻度或下刻度边缘画线段,所述线段在图纸上表示为速度sd2、时间t2的航程。
16.本发明还提供一种平移计算尺的使用方法,所述使用方法应用于航海测绘,实现根据已知我方速度和时间,确定目标速度和航向;所述方法包括以下步骤:s301.设定我方以速度sd3沿某方向航行,0时刻,我方位置为a0,目标在我0
°
方向,
与我方距离m3,记录目标位置为b0;s302.在1分钟后,按上面提及的使用方法根据我方速度sd3和时间1分钟,得到速度sd3下1分钟航程,将我方此时的位置记为a1;s303. 根据观测数据,目标到此时在我方x1
°
方向,与我方距离m4,记目标位置为b1;s304. 3分钟后,按上面提及的使用方法根据我方速度sd3和时间3分钟,得到速度sd3下3分钟航程,将我方此时刻的位置记为a2;s305. 根据观测数据,目标此时在我方x2
°
方向,与我方距离m5,记目标位置为b2;s306. 在获得目标b0、b1、b2三个位置后,设定目标的速度估计值sd4,则从底座尺拉出对应速度sd4的“t”形结构梁,调整估计值直至使b0、b1、b2分别对齐
ꢀ“
t”形结构梁201上的t=0、t=1、t=3对应的刻度线,能够对齐的估计值即为目标速度的测量值sd5,对齐之后,将b0、b1、b3点沿速度sd5对应的“t”形结构梁连成线,获得与我方向航向夹角为x3
°
,最终得到目标速度为sd5、相对我方航向为x3
°
。
17.本发明通过创新设计提出的尺规组合,通过拉伸尺设计有效减小了计算尺的占用空间和独立工具的数量,提升了存储和收藏的便利性,同时,计算尺通过拉伸尺与底座尺组合使用,可实现航行时间、航行速度与航行里程之间的快速计算,而且拉伸尺采用分立的结构可配合使用,从而将航海中常用的相对运动要素解算功能有机地灵活嵌入,所设计的计算尺还可以采用纸质印刷,大大降低制造与使用成本,还利于保存绘算过程,技术方案实际应用价值巨大。
附图说明
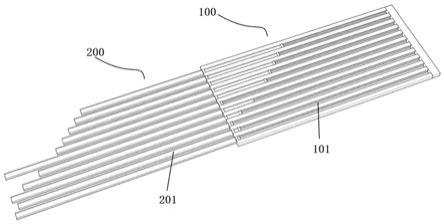
18.图1为根据本发明实施例1的平移计算尺的整体结构示意图;图2为根据本发明实施例1的平移计算尺的底座尺结构示意图;图3为根据本发明实施例1的平移计算尺的底座尺上板面时间刻度示意图;图4为根据本发明实施例1的平移计算尺的底座尺下板面时间刻度示意图;图5为根据本发明实施例1的平移计算尺的拉伸尺与拉伸尺的连接结构示意图;图6为实施例1中防止拉伸尺与底座尺脱落的结构示意图;图7为实施例1拉伸结构三维示意图;图8为实施例1拉伸尺下板面刻度示意图;图9为实施例1拉伸尺上板面刻度示意图;图10为实施例1拉伸尺和底座尺的结合使用图;图11为本发明实施例2的增加平移装置的平移计算尺总体结构示意;图12为实施例2的底座尺结构示意图一;图13为实施例2的底座尺结构示意图二;图14为实施例2的底座尺“回”字形连接部上表面刻度示意图;图15为实施例2的滚轮部分与底座部分连接的微齿轮结构示意图;图16为实施例2的滚轮与底座尺的连接结构示意图;图17为实施例2的滚轮结构示意图;图18为实施例2的滚轮结构透视图;
图19为本发明的平移计算尺的下板面刻度整体图;图20为本发明的平移计算尺使用方法绘制22节9分钟对应速度线段时用到的刻度示意图;图21为本发明的平移计算尺使用方法绘制在目标与我方不同时刻的相对位置图;图22为本发明的平移计算尺使用方法中目标相对于我方航向确定方法的示意图;图23为本发明的印刷式计算尺实施方案一的示意图一;图24为本发明的印刷式计算尺实施方案一的示意图二;图25为本发明的印刷式计算尺实施方案二的示意图一;图26为本发明的印刷式计算尺实施方案二的示意图二;图27为本发明的印刷式计算尺使用方法示意图一;图28为本发明的印刷式计算尺使用方法示意图二。
具体实施方式
19.下面将结合附图,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
21.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
22.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
23.实施例1如图1-10所示,本发明涉及一种平移计算尺,用于航海测绘,所述平移计算尺包括底座尺100和拉伸尺200,拉伸尺200可相对于底座尺100拉伸和缩回。其中底座尺100设有md根“工”字结构梁101,实施例1中以md=12示意,每一根“工”字结构梁101都有上沿刻度102和下沿刻度103(见图4),分别对应不同的速度;每一根“t”形结构梁201都有上沿刻度202和下沿刻度203(见图10),分别对应不同的速度。底座尺100和拉伸尺200都采用透明材料制成,并且底座尺100和拉伸尺200的上板面和下板面分别印制有相应的刻度,当拉伸尺200拉伸到极限位置时,拉伸尺200和底座尺100的刻度连续,形成完整的刻度范围。
24.优选,在底座尺100和拉伸尺200的上板面标有时间刻度104,时间刻度间隔为tdi(分钟)、刻度最大值为td(分钟),本实施例一中td=10、tdi=1,如图3所示。
25.在底座尺100和拉伸尺200的下板面(贴近绘图纸、所在桌面的一面)标有速度和航程刻度。底座尺100的每一根“工”字结构梁101表示两个速度,以sd为起始基准、sdi为速度间隔、sdn为速度增量,如,sd=10,sdi=1,sdn=20,则表示底座尺第2根“工”字结构梁101的上沿刻度102对应速度为sd=10节,第2根下沿刻度对应sd+1=11节,第3根上沿刻度对应sd+2=12节,以此类推共sdn=20节,则范围为sd=10
‑ꢀ
sd+sdn=30节,如图4所示,底座尺100的下板面边缘处106标有速度,即数字10-30,即为对应“工”字结构梁101上沿刻度102对应的速度(单位:节),可根据这些数字快速找到使用时需要的速度尺。
26.同时,在底座尺100的下板面标有刻度(sd+sdn)
×
td/12+1-(sd+sdn)
×
td/6,这里示意为(10+20)
×
10/12+1-(10+20)
×
10/6,即26-50(1:1比例尺),加粗刻度线就是此速度(单位:节)在上板面所标时间下对应的航程(单位:链)。
27.拉伸尺200和底座尺100之间的连接,由底座尺100上的“工”字结构梁101和拉伸尺200上的“t”形结构梁201连接,如图5所示,这种结构可以使得拉伸尺200上的“t”形结构梁201可以在底座尺100的相邻两个“工”字结构梁101内自由活动,实现了需要用的时候拉出来,不需要的时候收缩进去的功能。
28.为了防止拉伸尺200在拉伸过程中使用大的刻度时,脱离底座尺100,在底座尺100和拉伸尺200上分别设有第一限位结构和第二限位结构,如图6所示。其中,所述第一限位结构为设置在底座尺100上的相邻两个“工”字结构梁101之间的连接板105,第二限位结构为设置在拉伸尺200端部的限位块202。
29.本实施例1中,拉伸尺200的航程刻度为0-25链,底座尺的航程刻度为25-50链,拉伸后,拉伸尺200与底座尺100的刻度组合,实现0-50链的航程范围,延长了刻度范围,可有效获得扩展刻度。
30.由于设有连接板105,使得底座尺100的各个“工”字结构梁101形成为一体结构,相邻“工”字结构梁101之间形成容纳“t”形结构梁201的滑动槽,与底座尺100不同的是,拉伸尺200的各个“t”形结构梁201没有连在一起,是由md-1根独立的“t”形结构梁201形成,所有“t”形结构梁201的厚度均小于“工”字结构梁101的厚度。实施例1中,拉伸尺200由md-1=11根独立的“t”形结构梁201组成,如图7,在每一个“t”形结构梁201的末端均相应设有上述防脱落限位块202,限位块202的厚度为不小于1cm。这样,在每两根“工”字结构梁101之间连接一个厚度为1cm的连接板105,其与拉伸尺200端部厚度为1cm的限位块202,共同实现防止拉伸尺200在使用时脱离底座尺100的限位作用。
31.每根“t”形结构梁201的下板面标有速度和航程刻度,如图8所示,其中速度刻度从上往下,第1根“t”形结构梁201的下沿刻度对应速度为sd=10节,第2根上沿刻度对应的速度为sd+1=11节,第2根下沿刻度对应的速度为sd+2=12节,第3根上沿刻度对应的速度为sd+3=13节,以此类推,共20节,则范围为10-30节。每一根“t”形结构梁201的下表面标有刻度1至(sd+sdn)
×
td/12+1(1:1比例尺),这里对应的即为1至(10+20)
×
10/12,即1-25,如图8所示,加粗刻度线是在此速度时,上板面所标时间下对应的航程(单位:链)。如图9所示,每根“t”形结构梁201的上板面则标有时间刻度,时间刻度最大值为td(分钟),本实施例一中,时间刻度最大值td=10分钟。
32.底座尺100和拉伸尺200的结合可以实现sd至sd+sdn节速度对应1至td分钟的航程(单位:链),用时拉伸出来,不用时收回去,如图示意即为sd=10、td=10时,10-30节速度对应
1-10分钟的航程(单位:链)。需要注意的是,拉伸尺200的第n根的上沿刻度202和底座尺100的第n根下沿刻度103一起表示该速度下1-10分钟所对应的航程,如图10所示,拉伸尺200的第n根下沿刻度203与底座尺100的第n+1根上沿刻度102一起表示该速度下1-10分钟的航程,用加粗刻度线表示,即用拉伸尺的加粗刻度线与底座尺的加粗刻度线表示。
33.实施例2根据本发明的实施例2,如图11-18所示,一种平移计算尺,包括底座尺100、拉伸尺200,以及平移装置,所述平移装置包括设置在底座尺上的“回”字形连接部300和滚轮400,“回”字形连接部300与滚轮400组成的平移装置实现计算尺沿设定角度的平移,本实施例2是在实施例1的计算尺结构的基础上增加“回”字形连接部300与滚轮400。
34.其中,平移装置的“回”字形连接部300设置在底座尺100的最外侧两根“工”字结构梁101的中间处,在左右两端对称各设置一个“回”字形连接部300。
35.底座尺100的“回”字形连接部300内部具有第一微齿轮301,其结构可在底座尺100的两侧中间位置平移,如图12、图13与图15所示。与“回”字形连接部300的第一微齿轮301对应,“回”字形连接部300上表面标有角度刻度302,这里每一齿表示2.5
°
,如图14所示。“回”字形连接部300的第一微齿轮301与滚轮400部分的第二微齿轮401啮合,第一微齿轮301和第二微齿轮401保证滚轮400能在底座尺100的连接处自由转动,使用者稍微用力转动时,滚轮400便可以旋转一定的角度,每一个齿代表2.5
°
则实现特定角度的转动,如图15所示。“回”字形连接部300只能沿着一个方向滚动,不能满足任意平移的需求;但是,滚轮400是安装在底座尺100的边缘处,则可以通过调节滚轮400,以达到计算尺沿任意方向平移的目的,如图16所示。
36.滚轮400包括第二微齿轮401,所述第二微齿轮401具有圆柱体外侧面,并且具有内部空腔,滚轮400还包括圆柱形的调节旋钮402、滚动轴承403、固定棒404,如图17与图18所示。调节旋钮402与第二微齿轮401共圆心连接,方便使用者旋转角度;第二微齿轮401与滚动轴承403通过固定棒404连接在一起,当使用者对调节旋钮402施加旋转的力矩,第二微齿轮401就会旋转,与“回”字形连接部300的第一微齿轮301共同调节角度,从而改变滚动轴承403滚动的方向;滚动轴承403摩擦力小,根据滚动摩擦力小于滑动摩擦力的性质,使用者轻推计算尺,就可以使计算尺沿滚动轴承403滚动的方向平移。
37.使用方法如下:(1)情景一:10-30速度在1-10分钟内对应的航程(单位:链)。
38.假设21节速度,用时8分钟,首先分别在底座尺100的“工”字结构梁101和拉伸尺200的“t”形结构梁201上找到21节速度对应的刻度,在上板面找到第8分钟刻度线,可知在底座尺21节速度下沿加粗刻度线为28,即以21节速度行使8分钟的航程是28链,如图19所示。
39.(2)情景二:根据已知的速度和时间,在图纸上绘制出表示其航程的线段。
40.已知速度22节,用时9分钟。首先分别在底座尺100的“工”字结构梁101和拉伸尺200的“t”形结构梁201上找到22节速度对应的刻度,在上板面找到9分钟刻度,处在交点的加粗刻度线为33,得到对应航程为33链,为绘制航程线段的长度。在图纸上沿着拉伸尺200找到表示速度为22节的“t”形结构梁201的下沿刻度边缘、底座尺100的表示速度为22节“工”字结构梁101的上刻度边缘画线段,其在图纸上表示为速度22节,时间9分钟的航程,如
图20所示。
41.(3)情景三:快速确定目标的速度和航向。
42.我方以13节速度沿某方向航行,0时刻,我方位置为a0,目标在我0
°
方向,距我方40链,记录目标位置为b0。在1分钟后,按(2)情景二中所用的方法,得到13节速度1分钟航程,即是我方此时的位置,记为a1。根据声纳等其它设备观测目标到此时在我30
°
方向,距我方33链,记目标位置为b1。3分钟后,按(2)情景二所用的方法,得到13节速度3分钟航程,即为我方此时刻的位置,记为a2。观测到此时目标在我35
°
方向,距我方27链,记目标位置为b2。
43.如图21所示,在有了目标b0、b1、b2三个位置后,为快速确定目标的速度,在发现目标时,给出目标的一个速度估计,假设估计值为11节,则从底座尺100拉出对应速度的“t”形结构梁201,使b0、b1、b2分别对应11节“t”形结构梁201上的t=0、t=1、t=3对应的加粗刻度线,在几次调整后发现无法对齐,则把11节“t”形结构收回,从底座尺100拉出12节“t”形结构梁201,使b0、b1、b2分别去对应12节“t”形结构梁201上的t=0、t=1、t=3对应的加粗刻度线,在几次调整后发现仍无法对齐,收回12节“t”形结构梁201,拉出13节“t”形结构梁201,同上操作后发现可以对齐,则把b0、b1、b3点沿13节“t”形结构梁201连成线,发现与我方向航向夹角为25
°
,最终得到目标速度为13节、相对我方航向为25
°
,如图22所示。
44.(4)情景四:计算尺沿设定角度方向的平移。
45.将一条线向45
°
方向平移。首先将底座尺100两侧的滚轮结构沿着标在底座尺100与滚轮400连接处部分上的刻度调到45
°
处,然后用手轻推计算尺至想要的位置。
46.本发明通过创新设计提出的尺规组合,通过拉伸尺设计有效减小了计算尺的占用空间和独立工具的数量,提升了存储和收藏的便利性,同时,计算尺通过拉伸尺200与底座尺100组合使用,可实现航行时间、航行速度与航行里程之间的快速计算,而且拉伸尺200采用分立的结构可配合使用,从而将航海中常用的相对运动要素解算功能有机地灵活嵌入,所设计的计算尺还可以采用纸质印刷,大大降低制造与使用成本,还利于保存绘算过程,技术方案实际应用价值明显。
47.采用纸质印刷的印刷式计算尺,同样能够实现拉伸尺200全部处于拉出状态时的效果,目前印刷式计算尺有两种使用方法实现。
48.1、印刷式计算尺实现方案一根据本发明的一种印刷式计算尺,包括上、下的两条刻度尺和中间的航程刻度两个部分,上部、下部的两条刻度尺的刻度均为从左至右、从0开始增加,中间的航程刻度包括以速度sd1至sd1+sdn节行驶的时间1至td1分钟对应的航程刻度(单位:链)、时间1至td2分钟以不同的速度sd2至sd2+sdn行驶的航程刻度(单位:链)。
49.图23给出了印刷式计算尺实现的示意图,取值为sd1=5、td1=10、tdi1=1;td2=12、tdi1=0.5、sd2=1;sdn=25。
50.图23中,从上往下一共有sdn+2=27根线,其中1至sdn+1=26根线分别代表5-30节速度,图左边数值可快速确定对应速度。每根线下侧是在该速度下1-10分钟对应的航程(单位:链),可以通过刻度下的数字找到所需的时间,确定对应的航程(单位:链)。
51.在从上往下的sdn+1=26根线中,第2到sdn-1=24根线,同时表示1-td2=12分钟(每tdi2=0.5分钟一条线),从图右边数值可以快速确定每根线对应的时间。每根线的上侧是在该时间下1-26节速度对应的航程(单位:链),可以通过刻度下的速度找到所需速度,确定对
应航程(单位:链)。
52.在最上面第1根和最下面第sdn+2=27根线,均标有1-50刻度,是1:1比例尺,每1整刻度间隔表示1链。使用中,可以通过对照最上面和最下面的刻度来确定航程。
53.此种印刷式计算尺使用方法如下:例一:5-30速度在1-10分钟内对应的航程(单位:链) 已知速度5节,用时9分钟。首先通过左边数字找到表示速度5节的线,找到t=9处的刻度线,得出航程7.5链,如图24。
54.例二:1-12分钟在1-26速度内对应的航程(单位:链)已知用时6.5分钟,速度19节。首先通过右边的数字找到表示时间6.5分钟的线,找到v=19处的刻度线,得出航程20.5链,如图25。
55.2、印刷式计算尺实现方案二根据本发明的一种印刷式计算尺,包括上、下的两条刻度尺和中间的航程刻度两个部分,上部的刻度尺的刻度为从右至左、从0开始增加,下部的刻度尺的刻度为从左至右、从0开始增加,中间的航程刻度包括,左下半部分为以速度sd1-sd1+sdn节行驶的时间1-td1分钟对应的航程刻度(单位:链),右上半部分为时间1-td2分钟以不同的速度sd2-sd2+sdn行驶的航程刻度(单位:链)。
56.这里,图26给出印刷式计算尺实现二示意,取值为sd1=5、td1=10、tdi1=1;td2=13.5、tdi1=0.5、sd2=1;sdn=25。
57.图26中,从上往下一共有sdn+3=28根线,其中第2至sdn+2=27根线分别代表5-30节速度,图左边数值可快速确定对应速度,从上往下速度依次增加一节。每根线上侧是在该速度下1-10分钟对应的航程(单位:链),可以通过刻度下的数字找到所用时间,参照下部的航程刻度尺线,确定对应的航程(单位:链);下部的航程刻度尺的刻度标有0-70,从左往右依次递增,与其对应。
58.在从上往下的sdn+3=28根线中的第2至sdn+2=27根线,同时表示1至td2=13.5分钟(每tdi2=0.5分钟一条线),从上往下、从td2=13.5依次减少0.5分钟,从图右边数值可以快速确定每根线对应的时间。每根线的下侧是在该时间下1-26节速度对应的航程(单位:链),可以通过刻度下的速度找到所用速度,参照最上面航程线,确定对应航程(单位:链);上部的航程刻度尺的刻度标有70-0,从左往右依次递减,与其对应。
59.此种印刷式计算尺使用方法如下例一:5-30速度在1-10分钟内对应的航程(单位:链) 已知速度27节,用时8分钟。首先通过左边数字找到表示速度27节的线,找到t=8处的刻度线,参照最下部的航程刻度尺,得出航程36链,如图27所示。
60.例二:1-13.5分钟在1-26速度内对应的航程(单位:链)已知用时10.5分钟,速度17节。首先通过右边的数字找到表示时间10.5分钟的线,找到v=17处的刻度线,参照最上部的航程刻度尺,得出航程29.7链,如图28所示。
61.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1