智能机器人环境检测系统的制作方法
1.本发明涉及环境检测领域,特别是涉及智能机器人环境检测系统。
背景技术:
2.随着工业发展和城市化进程的不断加快,大气污染情况不断加剧,雾霾天气成为了常态化,大气中的各种有毒气体、有机挥发物和pm2.5也经常出现超标情况,不管是粉尘颗粒物,还是各种污染气体,都对民众的身体健康存在巨大危害,因此对大气污染进行环境检测是十分重要的。环境检测是利用gis技术对环境检测网络进行设计,环境检测收集的信息又能通过gis适时储存和显示,并对所选评价区域进行详细的场地监测和分析。
3.现有用于环境检测的设备一般固定设置在某一区域,通过在多个区域分别设置检测设备来实现对整体区域的环境检测。但是,上述方式会使用大量的环境检测设备,提高了环境检测成本,使用不灵活。
技术实现要素:
4.本发明目的是针对背景技术中存在的问题,提出能根据检测区域的需求来灵活移动并进行空气质量检测的智能机器人环境检测系统。
5.本发明的技术方案,智能机器人环境检测系统,包括底座、行走机构、安装罩、顶板、信号传输器、空气质量检测器、安装柱、摄像头和转动架。
6.行走机构设置在底座底部,安装罩设置在底座上部,安装罩上设置有用于驱动顶板升降的升降机构,安装柱设置在顶板上,信号传输器和空气质量检测器均设置在安装柱顶部,摄像头设置在转动架上,顶板上设置有用于驱动转动架转动的转动机构,信号传输器与空气质量检测器、摄像头、行走机构、升降机构和转动机构分别电性连接。
7.优选的,行走机构包括多组行走组件,行走组件包括滚轮、轮架、电机a、滑动杆、限位板、弹性件a和弹性件b,滚轮转动设置在轮架上,电机a设置在轮架上,电机a与滚轮驱动连接,滑动杆竖直设置在轮架顶部,滑动杆贯穿底座并与底座滑动连接,限位板与滑动杆顶端连接,弹性件a和弹性件b均竖直设置,弹性件a两端分别与轮架和底座连接,弹性件b两端分别与底座和限位板连接。
8.优选的,弹性件a和弹性件b均为弹簧,且弹性件a和弹性件b均套设在滑动杆外周侧。
9.优选的,升降机构包括底板、电机b、丝杆、丝杆螺母和滑杆,底板位于安装罩内侧,电机b设置在顶板上,电机b与丝杆驱动连接,丝杆和滑杆均竖直设置,丝杆与底板转动连接,丝杆与丝杆螺母螺纹连接,丝杆螺母与安装罩连接,滑杆两端分别与顶板和底板连接,滑杆贯穿安装罩顶部并与安装罩滑动连接。
10.优选的,转动机构包括电机c、齿轮和齿圈,电机c设置在顶板上,电机c与齿轮驱动连接,齿轮与齿圈啮合连接,齿圈转动设置在安装柱上,转动架设置在齿圈上。
11.优选的,顶板上设置有遮挡罩,电机c、齿轮和齿圈均位于遮挡罩内侧;安装罩顶端
与顶板底端之间连接有折叠罩,电机b、丝杆、丝杆螺母和滑杆均位于折叠罩内侧。
12.优选的,底座上设置有配重块。
13.优选的,配重块位于安装罩内侧,配重块上设置有缓冲垫。
14.上述智能机器人环境检测系统的使用方法如下:
15.s1、工作人员远程向信号传输器发送信号,信号传输器将信号传输至行走机构,控制行走机构行走至待检测空气质量的区域,在行走过程中,摄像头将影像通过信号传输器实时回传,通过转动机构驱动转动架转动,以调整摄像头角度;
16.s2、工作人员通过信号传输器向升降机构和空气质量检测器发送启动信号,利用升降机构调整顶板的高度,从而调整空气质量检测器的高度,空气质量检测器检测所处区域的空气质量,并将检测结果通过信号传输器进行回传;
17.s3、检测完毕后,工作人员通过信号传输器向行走机构传输控制信号,以行驶回初始位置。
18.与现有技术相比,本发明具有如下有益的技术效果:
19.本发明能根据检测区域的需求来灵活移动并进行空气质量检测,使用成本低。工作人员能通过远程终端发送信号并接收数据,通过信号传输器进行数据的传输,控制行走机构行驶至需要检测的区域,摄像头采集行驶过程中的影像,并实时回传至远程终端,便于工作人员准确、安全的控制设备移动至需要的区域。当设备移动至待检测空气质量的区域后,控制升降机构将空气质量检测器调整至需要检测的高度,待位置和高度均确定后,启动空气质量检测器检测空气质量,并将检测结果通过信号传输器回传至远程终端。
附图说明
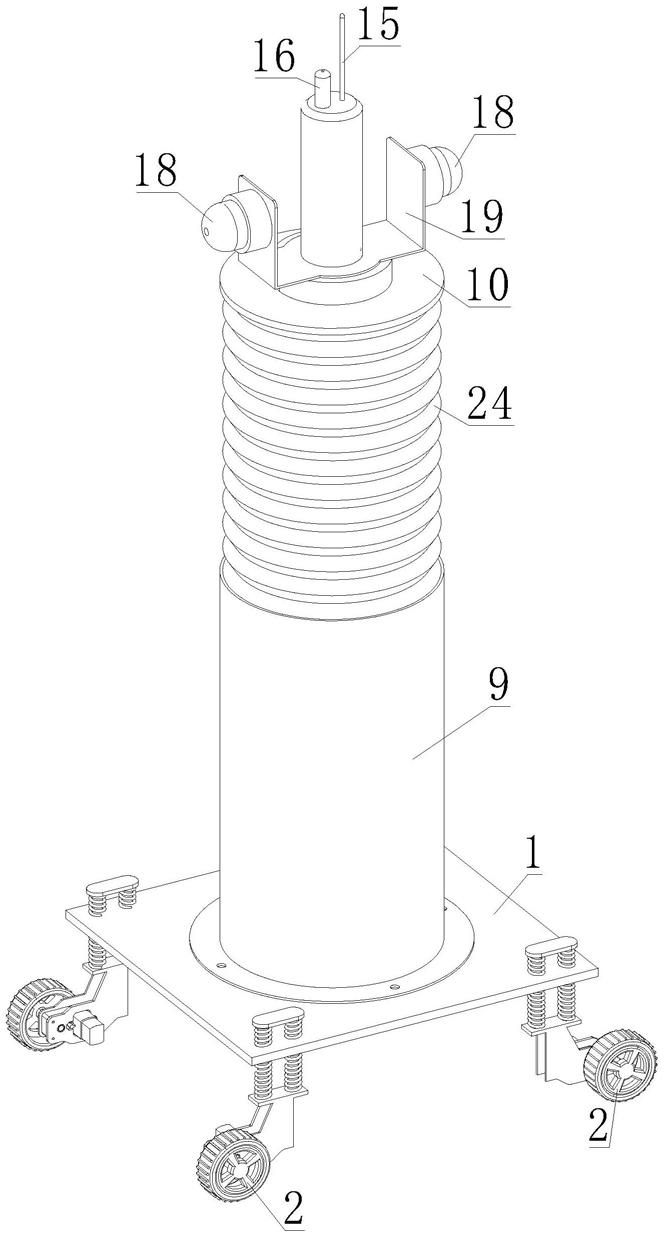
20.图1为本发明实施例的结构示意图;
21.图2为本发明实施例的结构剖视图;
22.图3为图2中a处的结构放大图;
23.图4为图2中b处的结构放大图。
24.附图标记:1、底座;2、滚轮;3、轮架;4、电机a;5、滑动杆;6、限位板;7、弹性件a;8、弹性件b;9、安装罩;10、顶板;11、底板;12、电机b;13、丝杆;131、丝杆螺母;14、滑杆;15、信号传输器;16、空气质量检测器;17、安装柱;18、摄像头;19、转动架;20、电机c;21、齿轮;22、齿圈;23、遮挡罩;24、折叠罩;25、配重块。
具体实施方式
25.实施例一
26.如图1-4所示,本发明提出的智能机器人环境检测系统,包括底座1、行走机构、安装罩9、顶板10、信号传输器15、空气质量检测器16、安装柱17、摄像头18和转动架19。
27.行走机构设置在底座1底部,安装罩9设置在底座1上部,安装罩9上设置有用于驱动顶板10升降的升降机构,安装柱17设置在顶板10上,信号传输器15和空气质量检测器16均设置在安装柱17顶部,摄像头18设置在转动架19上,顶板10上设置有用于驱动转动架19转动的转动机构,信号传输器15与空气质量检测器16、摄像头18、行走机构、升降机构和转动机构分别电性连接。
28.上述智能机器人环境检测系统的使用方法如下:
29.s1、工作人员远程向信号传输器15发送信号,信号传输器15将信号传输至行走机构,控制行走机构行走至待检测空气质量的区域,在行走过程中,摄像头18将影像通过信号传输器15实时回传,通过转动机构驱动转动架19转动,以调整摄像头18角度,便于观察不同角度下的周围环境;
30.s2、工作人员通过信号传输器15向升降机构和空气质量检测器16发送启动信号,利用升降机构调整顶板10的高度,从而调整空气质量检测器16的高度,空气质量检测器16检测所处区域的空气质量,并将检测结果通过信号传输器15进行回传,便于工作人员准确、安全的远程控制设备的行驶;
31.s3、检测完毕后,工作人员通过信号传输器15向行走机构传输控制信号,以行驶回初始位置,设备中包括电池,能对用电器件供电,在行驶回初始位置后,可对电池进行充电,以备下次检测。
32.本实施例能根据检测区域的需求来灵活移动并进行空气质量检测,使用成本低。工作人员能通过远程终端发送信号并接收数据,通过信号传输器15进行数据的传输,控制行走机构行驶至需要检测的区域,摄像头18采集行驶过程中的影像,并实时回传至远程终端,便于工作人员准确、安全的控制设备移动至需要的区域。当设备移动至待检测空气质量的区域后,控制升降机构将空气质量检测器16调整至需要检测的高度,待位置和高度均确定后,启动空气质量检测器16检测空气质量,并将检测结果通过信号传输器15回传至远程终端。
33.实施例二
34.本发明提出的智能机器人环境检测系统,相较于实施例一,本实施例中,如图3所示,行走机构包括多组行走组件,行走组件包括滚轮2、轮架3、电机a4、滑动杆5、限位板6、弹性件a7和弹性件b8,滚轮2转动设置在轮架3上,电机a4设置在轮架3上,电机a4与滚轮2驱动连接,滑动杆5竖直设置在轮架3顶部,滑动杆5贯穿底座1并与底座1滑动连接,限位板6与滑动杆5顶端连接,弹性件a7和弹性件b8均竖直设置,弹性件a7两端分别与轮架3和底座1连接,弹性件b8两端分别与底座1和限位板6连接。弹性件a7和弹性件b8均为弹簧,且弹性件a7和弹性件b8均套设在滑动杆5外周侧。
35.本实施例中,电机a4能驱动滚轮2转动,从而使滚轮2在地上滚动,以行驶至待检测区域。在整个设备的行驶过程中,遇到颠簸时,滚轮2将颠簸传递至轮架3,轮架3将颠簸传递至滑动杆5,滑动杆5上下滑动,利用弹性件a7和弹性件b8的震荡来消耗颠簸能量,从而起到减震作用。
36.实施例三
37.本发明提出的智能机器人环境检测系统,相较于实施例一,本实施例中,如图2所示,升降机构包括底板11、电机b12、丝杆13、丝杆螺母131和滑杆14,底板11位于安装罩9内侧,电机b12设置在顶板10上,电机b12与丝杆13驱动连接,丝杆13和滑杆14均竖直设置,丝杆13与底板11转动连接,丝杆13与丝杆螺母131螺纹连接,丝杆螺母131与安装罩9连接,滑杆14两端分别与顶板10和底板11连接,滑杆14贯穿安装罩9顶部并与安装罩9滑动连接。电机b12能驱动丝杆13转动,丝杆13在丝杆螺母131上进行升降,滑杆14起到导向作用,能使顶板10沿竖直方向移动,从而实现安装柱17的升降,进而实现空气质量检测器16的升降,以对
不同高度下的空气进行质量检测。
38.如图4所示,转动机构包括电机c20、齿轮21和齿圈22,电机c20设置在顶板10上,电机c20与齿轮21驱动连接,齿轮21与齿圈22啮合连接,齿圈22转动设置在安装柱17上,转动架19设置在齿圈22上,电机c20能驱动齿轮21转动,齿轮21带动齿圈22转动,齿圈22带动转动架19转动,从而实现摄像头18的转动,以采集不同方位的影像,便于工作人员远程控制设备行走。
39.如图4所示,顶板10上设置有遮挡罩23,电机c20、齿轮21和齿圈22均位于遮挡罩23内侧,遮挡罩23能对内侧的结构起到遮挡作用,保证整个设备的整洁。
40.如图2所示,安装罩9顶端与顶板10底端之间连接有折叠罩24,电机b12、丝杆13、丝杆螺母131和滑杆14均位于折叠罩24内侧,折叠罩24能对内侧的结构起到遮挡作用,保证整个设备的整洁。
41.实施例四
42.本发明提出的智能机器人环境检测系统,相较于实施例一,本实施例中,如图2所示,底座1上设置有配重块25,配重块25位于安装罩9内侧,配重块25上设置有缓冲垫。配重块25能降低整个设备的重心,提高设备行驶过程中的稳定性。缓冲垫能在升降机构下移时进行缓冲,防止发生刚性冲击。
43.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1