一种海湾生态环境远程监测预警站及其工作方法与流程
1.本发明涉及水质监测技术领域和海洋工程地质技术领域,具体而言,特别涉及一种海湾生态环境远程监测预警站及其工作方法。
背景技术:
2.海湾是海洋和大陆的连接枢纽,是人类活动最频繁的海域,易受人类活动影响,又因其较弱的水动力交换条件,也是污染最严重的海域,直接影响人类生活质量。加强海湾缺氧、酸化等生态环境风险的监测预警,提升海洋生态环境质量。海湾海水富营养化程度高、沉积物侵蚀淤积严重、海域漏油溢油事件时有发生,严重限制生态环境的可持续性发展。因此,实行系统有效的海湾生态环境实时监测预警,对于及时发现海湾海域生态环境健康问题,推动海湾“一湾一策”精准治理具有重要参考价值和借鉴意义。
3.目前海湾生态环境监测技术尚不成熟,大多采用化学法,将海水样品从各处取样在实验室加入化学试剂进行测量。此方法作为现有技术的金标准,测量结果精确度高、重复性好,但是测量结果时效性差、操作复杂、大多局限于小区域范围内特定时间段的水体,获取的数据在时间尺度和空间尺度上都难以连续。现有海洋原位监测技术大多采用浮标的形式,只能对海洋表面水体进行点式测量(专利号:zl202111037166.x),无法监测海湾海底生态环境变化以及海床侵蚀淤积和底层水浊度变化等。水质无人监测船(zl 201810925843.0)虽可以对海域进行水质监测,只能监测水体浅表面的水质参数,监测时间不连续,无法实现长期原位观测和预警。我国沿海海域广泛分布着大量的海底沙波,海底沙波是建筑、海岸线管理工程的重要砂源,海底沙波的运移对海底生态、海底管道产生危害和影响,研究海底沙波具有重要意义和应用价值,现有研究依赖于野外调查和卫星传感技术,监测成本高、监测效果差,更无法实时监测。
4.对于海湾海底生态环境进行全范围、连续性、系统性的远程监测和预警,对于海湾的健康状况的实时了解和及时治理具有重要意义。
技术实现要素:
5.为了弥补现有技术的不足,本发明提供了一种海湾生态环境远程监测预警站及其工作方法。
6.本发明是通过如下技术方案实现的:一种海湾生态环境远程监测预警站,包括坐底三脚架监测站、仿生浮台、监测飘带,其中,坐底三脚架监测站的主体包括底部的三角架支撑底座和位于其上部的圆柱形框架载物平台,三角架支撑底座由三个支撑腿组成,分别为第一支撑腿、第二支撑腿和第三支撑腿。每个支撑腿之间焊接支撑横杆,组成稳定三角结构,每个支撑腿底端连接一个配重型圆形支撑脚,配重型圆形支撑脚下安装固位探针,圆柱形框架载物平台的顶部固定安装有三根起吊杆组成三脚支架,并且其顶端固定安装有圆弧三角起吊钩;圆柱形框架载物平台内部由上到下分为三层,第一层内设置有竖向自然电位探
杆、声学释放器、第一海水电池、第二海水电池、第一储电池、第一叶绿素a传感器、第一海水cod原位传感器、第一海水bod原位传感器、第一向上的流速剖面仪;第二层内设置有第一温盐深浊度计、第一营养盐在线监测仪、第一数据传输与存储系统、第一控制系统、若干第一浮球;第三层内设置有孔隙水压力传感器、第一甲烷传感器、第一波潮仪、机械手臂、机械手臂支撑杆、导向管、向下的流速剖面仪;竖向自然电位探杆并且依次贯穿圆柱形框架载物平台和三角架支撑底座内,竖向自然电位探杆的中部由导向管设置于圆柱形框架载物平台内,其顶端固定设置有竖向自然电位探杆采集仓,竖向自然电位探杆采集仓的顶端由声学释放器固定于圆柱形框架载物平台内的顶部,竖向自然电位探杆采集仓的直径大于导向管26,当竖向自然电位探杆采集仓在下降到导向管时,导向管阻止其继续下降,从而确定竖向自然电位探杆的最终下降位置。
7.圆柱形框架载物平台的上表面设置有第一水下摄像机、第二水下摄像机、透明观察窗;第二支撑腿和第三支撑腿之间固定设置有固定式横向自然电位探杆,第一支撑腿和第二支撑腿之间活动连接有第一移动式横向自然电位探杆,第一支撑腿和第三支撑腿之间活动连接有第二移动式横向自然电位探杆,第一移动式横向自然电位探杆和第二移动式横向自然电位探杆可上下移动;第一支撑腿、第二支撑腿和第三支撑腿的上部分别固定安装有第一横向自然电位探杆采集仓、第二横向自然电位探杆采集仓、第三横向自然电位探杆采集仓;仿生浮台包括上部的铝合金框架浮台以及连接在其下部的圆柱形监测浮台,所述铝合金框架浮台内部安装有若干个第二浮球,若干个第二类浮球嵌于固定安装在铝合金框架浮台内的浮台浮球层横条箍架和浮台浮球层圆环箍架中,位于铝合金框架浮台内部第二浮球的上方固定安装有植物附着网,植物附着网上种植有多种类水生植物,铝合金框架浮台的上表面固定安装有太阳能板,铝合金框架浮台的上表面中心位置固定安装有半圆形浮台起吊钩;圆柱形监测浮台的内部安装有第三水下摄像机、第二叶绿素a传感器、第二波潮仪、第二海水cod原位传感器、第二海水bod原位传感器、第二向上的流速剖面仪、第二温盐深浊度计、第二营养盐在线监测仪、第二甲烷传感器、第二数据传输与存储系统、第二储电池、第二控制系统;仿生浮台下端连接第一凯夫拉绳,第一凯夫拉绳下端连接浮台锚;仿生浮台的上方设置有红色的照明灯;监测飘带包括第二凯夫拉绳、设置在第二凯夫拉绳上的自动卷绳器和若干监测集成球;第二凯夫拉绳上贯穿安装监测集成球,在第二凯夫拉绳的相应位置处固定两个铝合金钢块,铝合金钢块的下表面设置多个突出钢点;监测集成球外围由铝合金钢筋焊接成球形的铝合金框架,中间由铝合金钢筋焊接成格构形状用于传感器的放置和固定,监测集成球一侧通过轴心位置向一侧开通放置槽,用于安装和拆卸过程中第二凯夫拉绳的取放,监测集成球顶部和底部1/4位置焊接弧形铝合金钢板,在弧形铝合金钢板上焊接方形固定箍,方形固定箍上方安装4个螺栓,螺栓下部焊接圆形铝合金钢块用于固定第二凯夫拉绳,圆形铝合金钢块下放置高弹橡胶,将第二凯
夫拉绳相应位置沿着放置槽放入到监测集成球内,铝合金钢块放置在方形固定箍内部,监测集成球的内部固定安装有监测系统包括第三叶绿素a传感器、第三海水cod原位传感器、第三海水bod原位传感器、第三温盐深浊度计、第三向上的流速剖面仪、第三甲烷传感器、第三营养盐在线监测仪、第三储电池、第三数据传输与存储系统、第三控制系统和若干个第三浮球,第二凯夫拉绳上缠绕有导线,第二凯夫拉绳的顶端连接仿生浮台,第二凯夫拉绳的底端连接坐底三脚架监测站。
8.作为优选方案,圆柱形框架载物平台的外围采用铝合金管焊接成圆形箍架,内部由铝合金管焊接成格状支撑。
9.作为优选方案,配重型圆形支撑脚上开小孔。
10.作为优选方案,导向管的上部安装有胶条。
11.作为优选方案,第一移动式横向自然电位探杆和第二移动式横向自然电位探杆通过安装在支撑腿上的轨道活动连接,轨道上设置有可移动的滑轨、滑轨上装有支撑斜杆,支撑斜杆的另一端装有滑块,滑块的外部外截面为正方形、内截面为圆形的空心长方体,滑块内部安装球形滚珠。根据沙波位置在支撑腿上自由移动,第一移动式横向自然电位探杆和第二移动式横向自然电位探杆之间夹角为60度。
12.作为优选方案,植物附着网整体呈圆形,包括植物附着网横条箍架、植物附着网圆环箍架和植物附着网格组成,植物附着网圆环箍架为圆形铝合金钢筋,植物附着网横条箍架为直线型铝合金钢筋,植物附着网格为较细的直线型铝合金钢筋,三者相互焊接而成,植物附着网整体喷涂含有喜树碱的防污涂料;多种类水生植物选择浮叶植物和水草。
13.作为优选方案,根据具体水深位置和监测要求确定监测集成球的个数,在20 m~30 m的水深距离内安装一个监测集成球。
14.一种海湾生态环境远程监测预警站的工作方法,具体包括以下步骤:s1:在实验室内安装好所有坐底三脚架监测站的测量仪器,并进行数据测量校核;s2:在实验室内将所需仿生浮台上的仪器全部安装好,并进行数据测量校核。根据需求先将一定数量的第三类浮球20-3安装在仿生浮台上,在深海基地海水池中反复对第三类浮球20-3的数量和浮力大小进行调整,使植物附着网36入水深度维持在20 cm左右。
15.s3:将2个监测集成球46分别安装在第二凯夫拉绳44-2上,将导线45与第二凯夫拉绳44-2相互缠绕,并在适当位置处固定,底端系在坐底三脚架监测站的圆弧三角起吊钩7上;s4:各监测单元通过作业船运载、布放:将监测预警站全部设备放置到作业船上,运载到需要布放的海湾相应坐标点。先将仿生浮台布放到指定位置,然后将浮台锚56释放到海底,用于对仿生浮台在海面相对位置的固定;s5:坐底三脚架监测站通过第二凯夫拉绳44-2进行布放,布放结束后将第二凯夫拉绳44-2上端固定在仿生浮台上,为了减小仿生浮台受水流的影响产生的漂浮对坐底三脚架的影响,连接坐底三脚架和仿生浮台的监测飘带较长,并且富余的凯夫拉绳用自动卷绳器55进行回收,当浮台有漂浮时,自动卷绳器释放一定长度第二凯夫拉绳44-2,使仿生浮台的漂浮主要由浮台锚56控制。自动卷绳器回收力道较小,在满足回收富余凯夫拉绳的同时,又不会对坐底三脚监测站和仿生浮台产生影响;s6:坐底三脚架监测站在海底布放好后,通过机械手臂24将孔隙水压力探杆压入
海床深度1 m左右;s7:释放安装在竖向自然电位探杆8上的声学释放器9,使其在重力的作用下沿着导向管26压入海床,用于监测海床的侵蚀淤积;s8:待海床稳定后,通过编程控制第一移动式横向自然电位探杆32-1和第二移动式横向自然电位探杆32-2的下降速度和下降位置,使其紧贴海床表面。由于海底沙波的作用,部分固态参比电极悬浮于海水中,部分固态参比电极与沉积物接触,形成参差不齐的电势差,根据电势差的变化规律,可计算出海底沙波的运移速率和运移方向;s9:坐底三脚架监测站、仿生浮台、监测飘带监测的各参数的监测数值,监测数值与最终数值之间存在定量变换关系。通过编程对各参数的监测结果与标准值与参数国标标准限值进行对比分析,当超出国标标准限值时,操作系统予以警报,操作台上对应的参数灯进行红灯预警;s10:监测任务结束后通过布放坐标和预警站gps定位,通过作业船进行回收。
16.作为优选方案,步骤s8的具体包括以下步骤:s81:根据试验求出的以海水中一固定电极为参照电极,其余固态环形电极在海水中的电势差一般为-1和1之间,在砂质沉积物中的电势差一般小于-1,在黏土质海床中的电势差一般大于1,以竖向自然电位探杆中最上部的固定电极为参照电极,首先记录各固态环形电极和参照电极的电势差,通过数据传输与存储系统,将数据传输到作业船的实验室中;s82:计算所有第一电势差中最大的电势差值绝对值最大值,设电势差绝对值的最大值为,则公式为:;s83:计算所有电势差绝对值大于1的电势差的个数,设电势差绝对值大于1的个数为,则公式为:;s84:计算电势差绝对值大于1的固态环形电极占所有电极个数n的比例,设所占比例为,则公式为:;s85:通过控制滑道下移,均速下降自然电位探杆,下降的速度是1 m/min,判断下降过程中自然电位探杆是否已经接触到海床表面,即判断》1是否成立;如果》1不成立,则返回到上一步,继续以1 m/min下降横向自然电位探杆,直到》1成立;当》1时,说明自然电位探杆已经初步接近海床面,则停止以1 m/min的速度匀速下降横向自然电位探杆,每次下降1 cm横向自然电位探杆,每次下降后判断电势差绝对值大于1的固态环形电极占所有电极个数的比例是否在40%~60%之间,如果不满足40%《《60%,则判断是否满足》60%,如果满足40%《《60%,则停止下降恒向自然电位探杆,锁定滑轨;如果不满足,则继续下降1 cm的横向自然电位探杆,重复上述步骤,如果满足》60%,则上调0.5 cm的横向自然电位探杆,然后停止下降横向自然电位探杆,
锁定滑轨。
17.作为优选方案,步骤s9的具体包括以下步骤:s91:坐底三脚架监测站、仿生浮台、监测飘带监测各参数的监测数值分别记为氨氮(n-nh3)(a)、正磷酸盐(p-po4)(b)、硝酸盐+亚硝酸盐(n-no3+no2)(c)、亚硝酸盐(n-no2)(d);叶绿素a(e)、油污浓度(f)、海水cod(g)、海水bod(h)、ph(i)、溶解氧(j)、浊度(k)、甲烷(l)、侵蚀淤积(m)。将坐底三脚架监测站、仿生浮台、监测飘带监测到的各参数分别上传到实验室的第1数据处理预警台、第2数据处理预警台、第3-1数据处理预警台和第3-2数据处理预警台,并且在存储系统中备份。第1数据处理预警台用于处理坐底三脚架监测站的各参数监测数据并实现实时预警;第2数据处理预警台用于处理仿生浮台的各参数监测数据并实现实时预警、第3-1数据处理预警台和第3-2数据处理预警台分别用于处理两个监测集成球的各参数监测数据并实现实时预警。第1数据处理预警台、第2数据处理预警台、第3-1数据处理预警台和第3-2数据处理预警台对应的坐底三脚架监测站、仿生浮台、监测飘带的两个监测集成球46没有监测的参数不亮灯。
18.s92:监测数值与最终数值之间存在一定变换关系,设各参数的计算公式分别记为氨氮(n-nh3)(a(a))、正磷酸盐(p-po4)(b(b))、硝酸盐+亚硝酸盐(n-no3+no2)(c(c))、亚硝酸盐(n-no2)(d(d));叶绿素a(e(e))、油污浓度(f(f))、海水cod(g(g))、海水bod(h(h))、ph(i(i))、溶解氧(j(j))、浊度(k(k))、甲烷(l(l))、侵蚀淤积(m(m));s93:将各参数参考值:as、bs、cs、ds、es、fs、gs、hs、is(i
s1
、i
s2
)、js、ks、ls、ms(m
s1
、m
s2
)。对比分析监测数据与标准数据之间的关系,当氨氮(n-nh3)的监测数值小于国标限值时,即a(a)《as成立时,则预警氨氮(n-nh3)的警示灯,显示绿色;当氨氮(n-nh3)的监测数值大于国标限值时,则预警氨氮(n-nh3)的警示灯,显示红色,实现对于氨氮(n-nh3)含量超标的预警。其他各参数的监测结果与标准值与参数国标标准限值进行对比分析,当超出国标标准限值时,操作系统予以警报,操作台上对应的参数灯进行红灯预警;本发明由于采用了以上技术方案,与现有技术相比使其具有以下有益效果1.本发明所述的海湾生态环境远程监测预警站,真正实现对海湾海底地质和生态环境的实时监测和及时预警。
19.在海底地质方面:通过自然电位探杆实现对海床侵蚀淤积、海底沙波运移速率、泥沙浓度变化的监测;通过孔隙水压力传感器,实现对海床下一定范围内孔隙水压力的变化规律。
20.在海水浅层、海水内部和海底生态环境监测方面:通过营养盐在线监测仪实现对海湾海底营养盐监测,如:氨氮(n-nh3)、正磷酸盐(p-po4)、硝酸盐+亚硝酸盐(n-no3+no2)、亚硝酸盐(n-no2);通过叶绿素a传感器实现对叶绿素的监测;通过自然电位探杆可实现对海水油污浓度的监测;通过海水cod传感器可实现对海水cod的监测;通过海水bod传感器可实现对海水bod的监测;通过温盐深浊度计进行温度、ph、溶解氧、浊度的监测;通过甲烷传感器监测甲烷含量;通过照相机可对海底进行海底浮游生物的捕捉和识别,并可通过照片,进行数字处理,与浊度计所得悬浮物颗粒浓度进行校核。
21.2.采用自然电位探杆监测海底沙波的运移,使用的电极为固态环形电极,电极不用电量的供应,只需进行数据的采集,极大的节约了仪器的电量消耗,且采用合理的设计方法,可较为准备的计算沙波的运行速率,保证了监测沙波运移的准确性,监测精度高。
22.3.采用自然电位探杆进行海水中油污的监测,只需提前在实验室进行不同油污浓度的校核,在监测过程中与实验室标准进行对比,即可获得准确的油污浓度变化,监测过程耗电量低,为预警站的长期监测提供可能。
23.4.采用仿生浮台进行海水表面生态环境的监测,浮台上的水生植物为周围水鸟等生物提供了栖息场所,可减少周围水藻的生长,使浮台无论在视觉效果上还是在使用作用上都更具环境友好性。水生植物的覆盖,同时有效的减少了浮台的暴晒,增加浮台的使用寿命。
24.5.采用监测飘带,实现由海湾浅表面到海湾海底全水深的实时监测,可根据需要控制监测集成球的位置,实现不同水深处海水生态环境的监测。通过控制飘带的长度,也可更好的适应不同水深的监测。
25.6.采用一种实时预警方法,在现有标准的基础上,可对异常监测数据进行实时预警,提高了监测结果的时效性。
26.本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
27.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:图1为本发明所述海湾生态环境远程监测预警站整体结构示意图;图2为本发明所述坐底三脚架监测平台正视图;图3为本发明所述坐底三脚架监测平台结构示意图左视图;图4为本发明所述坐底三脚架监测平台结构示意图俯视图;图5为本发明所述固定横向自然定位探杆在三脚架上的位置示意图;图6为本发明所述第一移动式横向自然电位探杆未接触海床表面时位置示意图;图7为本发明所述第一移动式横向自然电位探杆接触海床表面时位置示意图;图8为本发明所述移动式横向自然电位探杆不同监测角度示意图;图9为斜杆上的支撑斜杆和滑道位置详图;图10为滑道详图;图11为滑块截面图;图12为本发明所述仿生浮台结构示意图;图13为植物附着网详图;图14为仿生浮台浮球安装详图;图15为监测集成球结构图;图16为凯夫拉绳衔接头结构图;图17为第二凯夫拉绳与监测集成球安装俯视图;图18为第二凯夫拉绳与监测集成球安装正视图;图19为自动卷绳器;图20为控制移动横向自然电位探杆下降的条件流程图;图21为各参数监测与预警方法条件流程图;
图22为本发明所提出的海湾监测系统一种实时例的预警原理图;其中,图1至图20中附图标记与部件之间的对应关系为:1—三角架支撑底座 1-1—第一支撑腿 1-2—第二支撑腿 1-3—第三支撑腿 2—圆柱形框架载物平台3—支撑横杆4—配重型圆形支撑脚5—固位探针6—起吊杆7—圆弧三角起吊钩8—竖向自然电位探杆9—声学释放器10-1—第一海水电池 10-2—第二海水电池11-1—第一储电池 11-2—第二储电池 11-3—第三储电池12-1—第一叶绿素a传感器 12-2—第二叶绿素a传感器 12-3—第三叶绿素a传感器13-1—第一海水cod原位传感器 13-2—第二海水cod原位传感器 13-3—第三海水cod原位传感器14-1—第一海水bod原位传感器 14-2—第二海水bod原位传感器 14-3—第三海水bod原位传感器15-1—第一向上的流速剖面仪 15-2—第二向上的流速剖面仪15-3—第三向上的流速剖面仪16-1—第一温盐深浊度计 16-2—第二温盐深浊度计 16-3—第三温盐深浊度计17-1—第一营养盐在线监测仪 17-2—第二营养盐在线监测仪 17-3—第三营养盐在线监测仪18-1—第一数据传输与存储系统 18-2—第二数据传输与存储系统 18-3—第三数据传输与存储系统19-1—第一控制系统 19-2—第二控制系统 19-3—第三控制系统20-1—第一类浮球 20-2第二类浮球 20-3第三类浮球21—孔隙水压力传感器22-1—第一甲烷传感器 22-2—第二甲烷传感器 22-3—第三甲烷传感器23-1—第一波潮仪 23-2—第二波潮仪24—机械手臂25—机械手臂支撑杆26—导向管27—向下的流速剖面仪28—竖向自然电位探杆采集仓29-1—第一水下摄像机 29-2—第二水下摄像机 29-3—第三水下摄像机30—透明观察窗31—固定式横向自然电位探杆32-1—第一移动式横向自然电位探杆 32-2—第二移动式横向自然电位探杆33-1—轨道 33-2—滑轨 33-3—支撑斜杆 33-4—滑块 33-5—滚珠34-1—第一横向自然电位探杆采集仓 34-2—第二横向自然电位探杆采集仓 34-3—第三横向自然电位探杆采集仓35—仿生浮台铝合金框架36—植物附着网37—多种类水生植物38—太阳能板39—照明灯40—圆柱形浮台监测系统41—半圆形浮台起吊钩42-1—植物附着网横条箍架 42-2—植物附着网圆环箍架 42-3—植物附着网格43-1—浮台浮球层横条箍架 43-2—浮台浮球层圆环箍架44-1—第一凯夫拉绳 44-2—第二凯夫拉绳45—导线46—监测集成球47—铝合金钢块48—突出钢点49—放置槽50—弧形铝合金钢板51—方形固定箍52—螺栓53—圆形铝合金钢块54—高弹橡胶55—自动卷绳器56—浮台锚。
具体实施方式
28.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
29.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
30.下面结合图1至图20对本发明的实施例的海湾生态环境远程监测预警站及其工作方法进行具体说明。
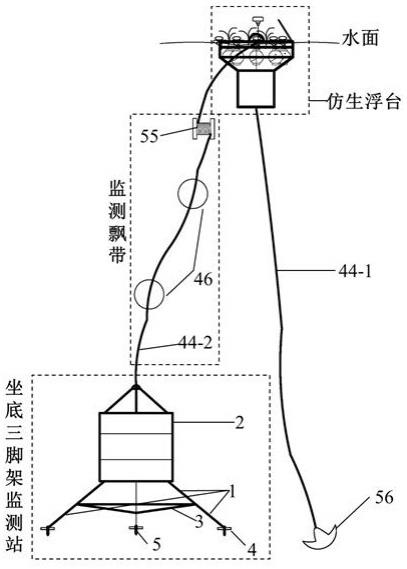
31.如图1所示,本发明提出了一种海湾生态环境远程监测预警站,包括坐底三脚架监测站、仿生浮台、监测飘带,坐底三脚架监测站的坐底三脚架框架主体材料采用高强度铝合
金材料焊接而成,铝合金是高强度、高刚度的轻金属材料,在保证强度和刚度的情况下尽量减小其重量,方便运输、布放和回收,并且其具有较高的耐腐蚀性。此外,为了增加框架材料的防腐蚀性,对框架整体与水体接触位置全部喷涂含有喜树碱的防污涂料,此为环境友好型防生物附着材料,在各大海域防污试验具有较好的稳定性,防污期效可达13个月以上,较好的满足了监测所需时长。圆柱形框架载物平台2的外围采用铝合金管焊接成圆形箍架,内部由铝合金管焊接成格状支撑,用于监测设备的放置和固定。
32.如图2至图3所示,坐底三脚架监测站的主体包括底部的三角架支撑底座1和位于其上部的圆柱形框架载物平台2,三角架支撑底座1由三个支撑腿组成,分别为第一支撑腿1-1、第二支撑腿1-2和第三支撑腿1-3。每个支撑腿之间焊接支撑横杆3,组成稳定三角结构,加强结构的稳定性。每个支撑腿底端连接一个配重型圆形支撑脚4,用于增加监测站的配重,减少因自重产生的下陷,配重型圆形支撑脚4下安装固位探针5,坐底三角监测站坐底后,固位探针5插入海床内更好的固定了坐底三角监测站在海床上的位置。圆柱形框架载物平台2的顶部固定安装有三根起吊杆6组成三脚支架,并且其顶端固定安装有圆弧三角起吊钩7;用于协助完成监测站的布放和回收。配重型圆形支撑脚4上开小孔,用于为了避免在下降的过程中配重型圆形支撑脚产生较大的阻力。
33.圆柱形框架载物平台2内部由上到下分为三层,第一层内设置有竖向自然电位探杆8、声学释放器9、第一海水电池10-1、第二海水电池10-2、第一储电池11-1、第一叶绿素a传感器12-1、第一海水cod原位传感器13-1、第一海水bod原位传感器14-1、第一向上的流速剖面仪15-1;第二层内设置有第一温盐深浊度计16-1、第一营养盐在线监测仪17-1、第一数据传输与存储系统18-1、第一控制系统19-1、若干第一浮球20-1;为了避免坐底三脚架监测站由于自重产生下沉,安装对应的若干第一浮球20-1。
34.第三层内设置有孔隙水压力传感器21、第一甲烷传感器22-1、第一波潮仪23-1、机械手臂24、机械手臂支撑杆25、导向管26、向下的流速剖面仪27;竖向自然电位探杆8并且依次贯穿圆柱形框架载物平台2和三角架支撑底座1内,竖向自然电位探杆8的中部由导向管26设置于圆柱形框架载物平台2内,其顶端固定设置有竖向自然电位探杆采集仓28,竖向自然电位探杆采集仓28的顶端由声学释放器9固定于圆柱形框架载物平台2内的顶部,预警站成功布放后释放声学释放器9,竖向自然电位探杆8通过导向管26约束下降方向。竖向自然电位探杆采集仓28的直径大于导向管26,当竖向自然电位探杆采集仓28在下降到导向管时,导向管26阻止其继续下降,从而确定竖向自然电位探杆8的最终下降位置。导向管26的上部安装有胶条,当竖向自然电位探杆8起到缓冲作用。
35.圆柱形框架载物平台2的上表面设置有第一水下摄像机29-1、第二水下摄像机29-2、透明观察窗30;如图4至图7所示,第二支撑腿1-2和第三支撑腿1-3之间固定设置有固定式横向自然电位探杆31,用于代替传统石油烃传感器监测水中油污泄露。第一支撑腿1-1和第二支撑腿1-2之间活动连接有第一移动式横向自然电位探杆32-1,第一支撑腿1-1和第三支撑腿1-3之间活动连接有第二移动式横向自然电位探杆32-2,第一移动式横向自然电位探杆32-1和第二移动式横向自然电位探杆32-2可上下移动;用于测量海底沙波的运移速率,辅助竖向自然电位探杆测量海底的侵蚀淤积。第一支撑腿1-1、第二支撑腿1-2和第三支撑腿1-3的
上部分别固定安装有第一横向自然电位探杆采集仓34-1、第二横向自然电位探杆采集仓34-2、第三横向自然电位探杆采集仓34-3,第一横向自然电位探杆采集仓34-1、第二横向自然电位探杆采集仓34-2、第三横向自然电位探杆采集仓34-3分别用于采集第一移动式横向自然电位探杆32-1、固定式横向自然电位探杆31和第二移动式自然电位探杆32-2的数据。
36.如图8至图11所示,第一移动式横向自然电位探杆32-1和第二移动式横向自然电位探杆32-2通过安装在支撑腿上的轨道33-1活动连接,轨道33-1上设置有可移动的滑轨33-2、滑轨33-2上装有支撑斜杆33-3,支撑斜杆33-3的另一端装有滑块33-4,为了减小摩阻力,滑块33-4的外部外截面为正方形、内截面为圆形的空心长方体,滑块33-4内部安装球形滚珠33-5。根据沙波位置在支撑腿上自由移动,由于监测站支撑腿为倾斜放置的,横向自然电位探杆在上下移动过程中可以通过滑块33-4适应不同间距的变化。第一移动式横向自然电位探杆32-1和第二移动式横向自然电位探杆32-2之间夹角为60度。二者相互配合使用,当出现坐底监测预警站坐底时一个横向自然电位探杆与沙波呈现平形的特殊情况时,可用另一个监测;一般情况下,二者辅助监测,可更精准计算沙波运移方向和速度。
37.如图12、14所示,仿生浮台包括上部的铝合金框架浮台35以及连接在其下部的圆柱形监测浮台40,所述铝合金框架浮台35内部安装有若干个第二浮球20-2,若干个第二类浮球20-2嵌于固定安装在铝合金框架浮台35内的浮台浮球层横条箍架43-1和浮台浮球层圆环箍架43-2中,根据框架重量调节第二类浮球20-2的大小和数量,使仿生浮台入水后达到理想水位位置。位于铝合金框架浮台35内部第二浮球20-2的上方固定安装有植物附着网36,植物附着网36上种植有多种类水生植物37,铝合金框架浮台35的上表面固定安装有太阳能板38,用于为设备提供电力。铝合金框架浮台35的上表面中心位置固定安装有半圆形浮台起吊钩41;方便布放和回收。
38.如图13所示,植物附着网36整体呈圆形,包括植物附着网横条箍架42-1、植物附着网圆环箍架42-2和植物附着网格42-3组成,植物附着网圆环箍架42-2为圆形铝合金钢筋,植物附着网横条箍架42-1为直线型铝合金钢筋,植物附着网格42-3为较细的直线型铝合金钢筋,三者相互焊接而成,植物附着网36整体喷涂含有喜树碱的防污涂料;多种类水生植物37选择浮叶植物和水草。浮叶植物叶片和花覆盖于仿生浮台上或漂浮于水中,可为水下生物提供庇荫,减少浮台周围水藻的生长,还可减少浮台的暴晒,增加仿生浮台的使用时间,为水鸟等生物提供临时栖息场所。
39.圆柱形监测浮台40的内部安装有第三水下摄像机29-3、第二叶绿素a传感器12-2、第二波潮仪23-2、第二海水cod原位传感器13-2、第二海水bod原位传感器14-2、第二向上的流速剖面仪15-2、第二温盐深浊度计16-2、第二营养盐在线监测仪18-2、第二甲烷传感器22-2、第二数据传输与存储系统18-2、第二储电池11-2、第二控制系统19-2;仿生浮台下端连接第一凯夫拉绳44-1,第一凯夫拉绳44-1下端连接浮台锚56;浮台锚56放置于海底,用于固定仿生浮台在海水表面的位置,避免在水流或波浪作用下发生较大位移。仿生浮台的上方设置有红色的照明灯39,并且在晚上亮红灯,可以较好地起到提醒过往船只对仿生浮台的及时避让作用。
40.监测飘带包括第二凯夫拉绳44-2、设置在第二凯夫拉绳44-2上的自动卷绳器55和若干监测集成球46;根据具体水深位置和监测要求确定监测集成球46的个数,在20 m~30 m的水深距离内安装一个监测集成球46。
41.如图1所示,第二凯夫拉绳44-2上贯穿安装监测集成球46,根据监测集成球46的大小,如图16至18所示,在第二凯夫拉绳44-2的相应位置处固定两个铝合金钢块47,铝合金钢块47的下表面设置多个突出钢点48,用于防止滑动。
42.监测集成球46外围由铝合金钢筋焊接成球形的铝合金框架,中间由铝合金钢筋焊接成格构形状用于传感器的放置和固定,监测集成球46一侧通过轴心位置向一侧开通放置槽49,用于安装和拆卸过程中第二凯夫拉绳44-2的取放,监测集成球46顶部和底部1/4位置焊接弧形铝合金钢板50,在弧形铝合金钢板50上焊接方形固定箍51,方形固定箍51上方安装4个螺栓52,螺栓52下部焊接圆形铝合金钢块53用于固定第二凯夫拉绳44-2,圆形铝合金钢块53下放置高弹橡胶54,增加其固定的稳定性。将第二凯夫拉绳44-2相应位置沿着放置槽49放入到监测集成球46内,铝合金钢块47放置在方形固定箍51内部,向下拧紧螺丝52用于固定。监测集成球46的内部固定安装有监测系统包括第三叶绿素a传感器12-3、第三海水cod原位传感器13-3、第三海水bod原位传感器14-3、第三温盐深浊度计16-3、第三向上的流速剖面仪15-3、第三甲烷传感器22-3、第三营养盐在线监测仪18-3、第三储电池11-3、第三数据传输与存储系统18-3、第三控制系统19-3和若干个第三浮球20-3,第三浮球20-3根据监测集成球的重量确定其大小和数量,使监测集成球放入海水维持重力和浮力的平衡,减少对第二凯夫拉绳44-2的拉拽作用;第二凯夫拉绳44-2上缠绕有导线45,用于从上而下电量和数据的传输,第二凯夫拉绳44-2的顶端连接仿生浮台,第二凯夫拉绳44-2的底端连接坐底三脚架监测站。为避免仿生浮台的拉拽作用,第二凯夫拉绳44-2较长于第一凯夫拉绳44-1,用自动卷绳器55收集富余的第二凯夫拉绳44-2和导线45。监测飘带随水流的作用对自动卷绳器55较小的牵引力不会触发自动卷绳器55对第二凯夫拉绳44-2的松放作用,当仿生浮台对自动卷绳器55有较大的的牵引力时,自动卷绳器55可自动放出部分第二凯夫拉绳44-2,使全部作用力用于第一凯夫拉绳44-1。
43.在海水浅层、海水内部和海底生态环境监测方面:通过营养盐在线监测仪实现对海湾海底营养盐监测,如:氨氮(n-nh3)、正磷酸盐(p-po4)、硝酸盐+亚硝酸盐(n-no3+no2)、亚硝酸盐(n-no2);通过叶绿素a传感器实现对叶绿素的监测;通过自然电位探杆可实现对海水油污浓度的监测;通过海水cod传感器可实现对海水cod的监测;通过海水bod传感器可实现对海水bod的监测;通过温盐深浊度计进行温度、深度、溶解氧、浊度的监测;通过照相机可对海底进行海底浮游生物的捕捉和识别,并可通过照片,进行数字处理,与浊度计所得悬浮物颗粒浓度进行校核。通过孔隙水压力传感器监测海床孔隙水压力变化值。
44.将监测预警站监测的海床侵蚀淤积、氨氮(n-nh3)、正磷酸盐(p-po4)、硝酸盐+亚硝酸盐(n-no3+no2)、亚硝酸盐(n-no2)、叶绿素a、海水cod、海水bod、温度、ph、溶解氧、浊度的数值传回试验室并在预警站存储系统中备份,通过操作平台和电脑对数据进行处理分析,并将数据与海湾生态标准数据对比分析。每一个参数都在操作台设置警报灯,当检测参数的数值超过标准范围,则会在在操作台上提示异常数值,并通过相应参数警报灯进行红色预警。
45.如图20至图22所示,一种海湾生态环境远程监测预警站的工作方法,其特征在于,具体包括以下步骤:s1:在实验室内安装好所有坐底三脚架监测站的测量仪器,并进行数据测量校核;s2:在实验室内将所需仿生浮台和监测集成球上的仪器全部安装好,并进行数据
测量校核。根据需求先将一定数量的第三类浮球20-3安装在仿生浮台上,在深海基地海水池中反复对第三类浮球20-3的数量和浮力大小进行调整,使植物附着网36入水深度维持在20 cm左右。
46.s3:将2个监测集成球46分别安装在第二凯夫拉绳44-2上,将导线45与第二凯夫拉绳44-2相互缠绕,并在适当位置处固定,底端系在坐底三脚架监测站的圆弧三角起吊钩7上;s4:各监测单元通过作业船运载、布放:将监测预警站全部设备放置到作业船上,运载到需要布放的海湾相应坐标点。先将仿生浮台布放到指定位置,然后将浮台锚56释放到海底,用于对仿生浮台在海面相对位置的固定;s5:坐底三脚架监测站通过第二凯夫拉绳44-2进行布放,布放结束后将第二凯夫拉绳44-2上端固定在仿生浮台上,为了减小仿生浮台受水流的影响产生的漂浮对坐底三脚架的影响,连接坐底三脚架和仿生浮台的监测飘带较长,并且富余的凯夫拉绳用自动卷绳器55进行回收,当浮台有漂浮时,自动卷绳器释放一定长度第二凯夫拉绳44-2,使仿生浮台的漂浮主要由浮台锚56控制。自动卷绳器回收力道较小,在满足回收富余凯夫拉绳的同时,又不会对坐底三脚监测站和仿生浮台产生影响;s6:坐底三脚架监测站在海底布放好后,通过机械手臂24将孔隙水压力探杆压入海床深度1 m左右;s7:释放安装在竖向自然电位探杆8上的声学释放器9,使其在重力的作用下沿着导向管26压入海床,用于监测海床的侵蚀淤积;s8:待海床稳定后,在作业船的实验室中通过编程控制第一移动式横向自然电位探杆32-1和第二移动式横向自然电位探杆32-2的下降速度和下降位置,使其紧贴海床表面。由于海底沙波的作用,部分固态参比电极悬浮于海水中,部分固态参比电极与沉积物接触,形成参差不齐的电势差,根据电势差的变化规律,可计算出海底沙波的运移速率和运移方向;s9:布放完成。联系陆上实验室,确保陆上实验室内数据接收的完整性。
47.s10:坐底三脚架监测站、仿生浮台、监测飘带监测的各参数的监测数值,监测数值与最终数值之间存在定量变换关系。陆上实验室内通过编程对各参数的监测结果与标准值与参数国标标准限值或者参考值进行对比分析,当超出国标标准限值或参考值范围时,操作系统予以警报,操作台上对应的参数灯进行红灯预警;s11:监测任务结束后通过布放坐标和预警站gps定位,通过作业船进行回收。
48.步骤s8的具体包括以下步骤:s81:根据试验求出的以海水中一固定电极为参照电极,其余固态环形电极在海水中的电势差一般为-1和1之间,在砂质沉积物中的电势差一般小于-1,在黏土质海床中的电势差一般大于1,以竖向自然电位探杆中最上部的固定电极为参照电极,首先记录各固态环形电极和参照电极的电势差,通过数据传输与存储系统,将数据传输到作业船的实验室中;s82:计算所有第一电势差中最大的电势差值绝对值最大值,设电势差绝对值的最大值为,则公式为:
;s83:计算所有电势差绝对值大于1的电势差的个数,设电势差绝对值大于1的个数为,则公式为:;s84:计算电势差绝对值大于1的固态环形电极占所有电极个数n的比例,设所占比例为,则公式为:;s85:通过控制滑道下移,均速下降自然电位探杆,下降的速度是1 m/min,判断下降过程中自然电位探杆是否已经接触到海床表面,即判断》1是否成立;如果》1不成立,则返回到上一步,继续以1 m/min下降横向自然电位探杆,直到》1成立;当》1时,说明自然电位探杆已经初步接近海床面,则停止以1 m/min的速度匀速下降横向自然电位探杆,每次下降1 cm横向自然电位探杆,每次下降后判断电势差绝对值大于1的固态环形电极占所有电极个数的比例是否在40%~60%之间,如果不满足40%《《60%,则判断是否满足》60%,如果满足40%《《60%,则停止下降恒向自然电位探杆,锁定滑轨;如果不满足,则继续下降1 cm的横向自然电位探杆,重复上述步骤,如果满足》60%,则上调0.5 cm的横向自然电位探杆,然后停止下降横向自然电位探杆,锁定滑轨。
49.步骤s10的具体包括以下步骤:s101:坐底三脚架监测站、仿生浮台、监测飘带监测各参数的监测数值分别记为氨氮(n-nh3)(a)、正磷酸盐(p-po4)(b)、硝酸盐+亚硝酸盐(n-no3+no2)(c)、亚硝酸盐(n-no2)(d);叶绿素a(e)、油污浓度(f)、海水cod(g)、海水bod(h)、ph(i)、溶解氧(j)、浊度(k)、甲烷(l)、侵蚀淤积(m)。将坐底三脚架监测站、仿生浮台、监测飘带监测到的各参数分别上传到实验室的第1数据处理预警台、第2数据处理预警台、第3-1数据处理预警台和第3-2数据处理预警台,并且在存储系统中备份。第1数据处理预警台用于处理坐底三脚架监测站的各参数监测数据并实现实时预警;第2数据处理预警台用于处理仿生浮台的各参数监测数据并实现实时预警、第3-1数据处理预警台和第3-2数据处理预警台分别用于处理两个监测集成球的各参数监测数据并实现实时预警。第1数据处理预警台、第2数据处理预警台、第3-1数据处理预警台和第3-2数据处理预警台对应的坐底三脚架监测站、仿生浮台、监测飘带的两个监测集成球46没有监测的参数不亮灯。
50.s102:监测数值与最终数值之间存在一定变换关系,设各参数的计算公式分别记为氨氮(n-nh3)(a(a))、正磷酸盐(p-po4)(b(b))、硝酸盐+亚硝酸盐(n-no3+no2)(c(c))、亚硝酸盐(n-no2)(d(d));叶绿素a(e(e))、油污浓度(f(f))、海水cod(g(g))、海水bod(h(h))、ph(i(i))、溶解氧(j(j))、浊度(k(k))、甲烷(l(l))、侵蚀淤积(m(m));s103:将各参数标准值:as、bs、cs、ds、es、fs、gs、hs、is(i
s1
、i
s2)
、js、ks、ls、ms。对比分析监测数据与标准数据之间的关系,当氨氮(n-nh3)的监测数值小于国标限值时,即a(a)《as成立时,则预警氨氮(n-nh3)的警示灯,显示绿色;当氨氮(n-nh3)的监测数值大于国标限
值时,则预警氨氮(n-nh3)的警示灯,显示红色,实现对于氨氮(n-nh3)含量超标的预警。其他各参数的监测结果与标准值与参数国标标准限值进行对比分析,当超出国标标准限值时,操作系统予以警报,操作台上对应的参数灯进行红灯预警。
51.在本发明的描述中,术语“多个”则指两个或两个以上,除非另有明确的限定,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“连接”、“安装”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
52.在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
53.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1