一种盾构机水平传送带上渣土改良状态的实时判定方法
1.本发明属于盾构隧道施工技术领域,具体是一种基于三维激光扫描技术的盾构机水平传送带上渣土改良状态的实时判定方法。
背景技术:
2.盾构隧道施工过程中,盾构渣土达到合适改良状态,是盾构安全、高效掘进的重要保证。渣土不合适改良容易造成以下危害:当改良后的渣土过稀、流动性强时,容易造成螺旋输送机发生喷涌,进而导致土仓压力突变无法支撑掌子面压力,发生较大沉降,严时重会导致盾构前方发生塌方;当改良后的渣土流动性较差时,不利于渣土的排除,粘附性较强的渣土容易糊住刀盘,增加刀盘的磨损。
3.目前,针对传送带上渣土改良状况的判定主要采用室内坍落度试验,通过测其坍落度值以判断其改良状况,该方法需要相关人员在盾构机传送带上取下渣土进行坍落度实验,对传送带上渣土判定存在一定的滞后性。
技术实现要素:
4.本发明提供一种基于三维激光扫描技术的盾构机水平传送带上渣土改良状态的实时判别定方法,该方法可以减少盾构掘进过程中因需测渣土坍落度而造成人力、财力的耗费,并避免判定渣土改良状态的滞后性。
5.为实现上述技术目的,本发明采用如下技术方案:
6.一种盾构机水平传送带上渣土改良状态的实时判定方法,包括:
7.步骤1,利用现场渣土及改良剂作为实验材料,对不同改良后的渣土进行坍落度试验,根据坍落度值评价每种渣土的改良状态是否合适,再对每种合适改良状态的渣土进行堆积实验,即模拟渣土从盾构螺旋机距离盾构机传送带的高度落下,以获取合适改良状态下渣土的静止状态割线角度取值范围[w
min
,w
max
];
[0008]
步骤2,通过三维激光扫描仪对现场盾构机水平传送带上的渣土进行扫描,扫描方向垂直于传送带运动方向;每次扫描得到渣土表面的点云数据,相应建立盾构机水平传送带上的渣土表面曲线,并根据渣土表面曲线确定盾构机水平传送带上的渣土在垂直于传送带运动方向的割线角度θ;
[0009]
步骤3,根据盾构机水平传送带上的渣土的割线角度θ与合适改良状态下渣土的静止状态割线角度取值范围[w
min
,w
max
],实时判断盾构机水平传送带上的渣土的改良状态。
[0010]
进一步地,步骤3的判断方法为:
[0011]
若λθ∈[w
min
,w
max
],则判定盾构机水平传送带上的渣土的改良状态合适;其中,λ为静动割线角转变系数;
[0012]
若λθ>w
max
,则判定盾构机水平传送带上的渣土的流动性较差,需要调整注水量及泡沫注入比,使渣土的流动性增加;
[0013]
若λθ<w
min
,则判定盾构机水平传送带上的渣土的流动性太强或渣土过于松散,需
要调整注水量及泡沫注入比,使渣土的流动性降低。
[0014]
进一步地,所述静动割线角转变系数λ,通过同样改良状态下渣土,在室内实验测得渣土割线角与处于盾构机水平传送带上渣土割线角比值获得。
[0015]
进一步地,采用三维激光扫描仪发射线性激光,通过发送与接收激光脉冲获取渣土表面的点云数据,利用编程或现有点云数据处理软件对点云数据进行去噪处理,进而对渣土表面进行三维模型重建,进而获取垂直传送带运动方向的渣土表面曲线,进而根据渣土表面曲线确定割线角度。
[0016]
进一步地,所述三维激光扫描仪通过以太网或usb接口实时传输扫描到的点云数据。
[0017]
进一步地,所述割线角度的确定方法为:
[0018]
(1)以传送带上渣土堆积的方向为z轴,以传送带运动的方向为y轴,以垂直于yoz平面的方向为x轴建立坐标系;
[0019]
(2)将三维激光扫描仪沿x轴方向对渣土表面扫描得到的所有点云数据,均使用建立的坐标系表示,然后拟合出渣土表面曲线f1(x,y,z);
[0020]
(3)计算渣土表面曲线f1(x,y,z)中,z轴值最大的两个点a1(x1,y1,z1)、a2(x2,y2,z2),和z轴值最小两个交点b1(x3,y3,z3)、b2(x4,y4,y4);其中,x1≤x2,x3<x4;
[0021]
(4)根据四个点a1,a2,a3,a4,按以下公式计算盾构机水平传送带上的渣土的割线角度θ:
[0022][0023]
本发明与现有技术相比,具有以下优点:
[0024]
1、提高盾构机水平传送带上渣土状态判定的准确性。现有技术中判断盾构机水平传送带上渣土改良状态基本上依靠在现场取土,进行坍落度试验测得,不同的人进行试验的操作步骤及操作方式不同,造成结果有一定误差;同时,对坍落值的读数产生误差,对判定的结果也会产生一定影响。而本发明通过三维激光扫描仪技术,对渣土表面进行无接触测量,根据获取渣土表面的点云数据进行渣土表面三维模型重建,通过计算机计算对渣土状态进行判定,使判定结果更加准确。
[0025]
2、本发明通过对现场改良后的渣土堆积状态进行研究,通过计算出盾构机水平传送带上动渣土割线角度θ,对盾构机水平传送带上改良后渣土状态进行判定,避免现场采土进行试验的复杂性与耗时性。
[0026]
3、采用三维激光扫描技术对盾构机水平传送带上渣土改良状态进行判定,有利于减少现场人力的配置,减少现场人力、物力的损耗,有利于促成盾构施工向着少人化,智能化方向发展,切实保证施工人员的人身安全。
[0027]
4、采用三维激光扫描技术对盾构机水平传送带上渣土改良状态进行判定,通过计算机对数据进行处理充分利用计算机强大的计算功能,更加快速的判断出渣土改良状态,直接为盾构司机的下步操作提供借鉴,更加体现在施工过程中进行控制,有利于增加其时效性。
附图说明
[0028]
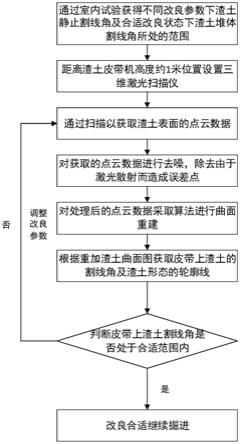
图1为本发明实施例所述方法的流程图;
[0029]
图2为渣土堆体的割线角度定义图;
[0030]
图3为本发明实施例坐标系下盾构机水平传送带上渣土横截面轮廓线图。
具体实施方式
[0031]
下面对本发明的实施例作详细说明,本实施例以本发明的技术方案为依据开展,给出了详细的实施方式和具体的操作过程,对本发明的技术方案作进一步解释说明。
[0032]
参见图1-图3,一种基于三维激光扫描技术的盾构机水平传送带上渣土改良状态的实时判定方法,包括如下步骤:
[0033]
步骤1,利用现场渣土及改良剂作为实验材料,对不同改良状态下的渣土进行坍落度试验和堆积实验,获取合适改良状态下渣土的静止状态割线角度取值范围[w
min
,w
max
]。
[0034]
利用现场渣土及改良剂作为实验材料,对不同改良状态下渣土进行坍落度试验,根据坍落度值及渣土表面判断渣土的改良状态,将该改良后的渣土模仿盾构螺旋机至盾构机传送带的距离从高度h落下,测得渣土堆积静止状态下的割线角度,进而得到合适改良状态下渣土的静止状态割线角度范围[w
min
,w
max
],由此作为盾构机水平传送带上渣土改良状态的判定依据。
[0035]
在具体的实验例中,可选择将高度h设为1米,根据坍落度及渣土表面特征确定坍落度位于[15cm,20cm]改良为合适改良,其静止状态下割线角度应处于[19.6
°
,28
°
]范围内。
[0036]
本步骤中渣土堆静止状态下的割线角度,与后续步骤2中的割线角度确定方法相同,即:在垂直于传送带运动方向渣土截面,取同一截面下两端渣土割线角的平均值,以下割线角取值均如此。
[0037]
步骤2,通过三维激光扫描仪对现场盾构机水平传送带上的渣土进行扫描,扫描方向垂直于传送带运动方向;每次扫描得到渣土表面的点云数据,相应建立盾构机水平传送带上的渣土表面曲线,并根据渣土表面曲线确定盾构机水平传送带上的渣土在垂直于传送带运动方向的割线角度θ(垂直于传送带运动方向渣土截面,取同一截面下两端渣土割线角的平均值,以下割线角取值均如此);
[0038]
采用三维激光扫描仪发射线性激光,通过发送与接收激光脉冲获取渣土表面的点云数据,然后通过以太网或usb接口将实时传输扫描到的点云数据发送到电脑端进行下一步处理。
[0039]
电脑从三维激光扫描仪接收到原始的点云数据后,由于其中包含各种噪声,噪声源包括:三维激光扫描仪随着盾构机传送带的震动而晃动、三维激光扫描仪发射出的激光线照射在水面上发生散射、三维激光扫描仪工作环境的昏暗及灰尘产生的噪点等,因此本实施例首先利用编程或现有点云数据处理软件对点云数据进行去噪处理;
[0040]
然后,利用python或其他相关编程软件对处理后的点云数据进行读取,进而对渣土表面进行三维模型重建,获取垂直传送带运动方向的渣土表面曲线,进而根据渣土表面曲线确定割线角度。其中,割线角度的确定方法为:
[0041]
(1)以传送带上渣土堆积的方向为z轴,以传送带运动的方向为y轴,以垂直于yoz
平面的方向为x轴建立坐标系;
[0042]
(2)将三维激光扫描仪沿x轴方向对渣土表面扫描得到的所有点云数据,均使用建立的坐标系表示,然后拟合出渣土表面曲线f1(x,y,z);
[0043]
(3)计算渣土表面曲线f1(x,y,z)中,z轴值最大的两个点a1(x1,y1,z1)、a2(x2,y2,z2),和z轴值最小两个交点b1(x3,y3,z3)、b2(x4,y4,y4);其中,x1≤x2,x3<x4,若x1=x2则点a1,a2为同一点;
[0044]
(4)根据四个点a1,a2,a3,a4,按以下公式计算盾构机水平传送带上的渣土的割线角度θ:
[0045][0046]
步骤3,根据盾构机水平传送带上的渣土的割线角度θ与合适改良状态下渣土的静止状态割线角度取值范围[w
min
,w
max
],实时判断盾构机水平传送带上的渣土的改良状态。
[0047]
若λθ∈[w
min
,w
max
],则判定盾构机水平传送带上的渣土的改良状态合适,记为工况一,可保持渣土当前改良参数继续进行掘进;
[0048]
本发明中的λ为静动割线角转变系数,通过同样改良状态下渣土,在室内实验测得渣土割线角与处于盾构机水平传送带上渣土割线角比值获得。本实验例中砂土的静动割线角转变系数λ取值为2。
[0049]
若λθ>w
max
,则可从一定程度上反映当前状况下渣土的堆积角度较大,表明盾构机水平传送带上的渣土的流动性较差,记为工况二。此时需要调整注水量及泡沫注入比,使渣土的流动性增加,通过不断监控调整,直至盾构机水平传送带上的渣土的割线角度θ满足λθ∈(w
min
,w
max
)后再继续掘进。
[0050]
若λθ<w
min
,则可以从一定程度上反映当前状况下渣土的堆积角较小,表明在该状态下渣土的流动性太强或渣土过于松散,记为工况三。此时需要调整注水量及泡沫注入比,降低渣土的流动性使之满足要求,对调整改良后的渣土继续进行监测,直至渣土的割线角度λθ达到合适改良状态下渣土的割线角度区间[w
min
,w
max
]内,当达到合适改良状态保持相应的改良参数继续进行掘进。
[0051]
以上实施例为本技术的优选实施例,本领域的普通技术人员还可以在此基础上进行各种变换或改进,在不脱离本技术总的构思的前提下,这些变换或改进都应当属于本技术要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1