一种面向多域作战的传感器管理及控制方法与流程
1.本发明涉及多域作战系统的态势感知技术领域,尤其涉及一种面向多域作战的传感器管理及控制方法。
背景技术:
2.传统单机及编队作战中传感器作为平台一部分,单独控制,然而单一传感器能力有上限,在信息化时代,依靠单机完成火控杀伤链闭环越来越困难,因而需要将协同作战系统中的传感器有机整合,如何在协同作战过程中实现“借眼”和“控眼”成为多域协同作战的首要解决的问题。
技术实现要素:
3.面对上述技术背景,本发明提出了一种面向多域作战的传感器管理及控制方法,该方法能够实现平台传感器任务筛选处理、而且能够控制平台传感器探测跟踪任务执行,实现搜索与探测功能模块数据,完成传感器数据跨平台数据通信和交换,充分利用对节点自身传感器的控制和优化管理,实现多域作战系统的态势感知。
4.为达到上述目的,本发明的实施例采用如下技术方案:
5.一种面向多域作战的传感器管理及控制方法,其特征在于,包括如下步骤:
6.1)监控传感器状态、参数:对传感器现有工作状态进行监控,基于传感器能力,实时计算传感器任务饱和度,并反馈剩余传感器资源至任务分配系统;
7.2)接收搜索、探测、跟踪及制导任务:接收并解析任务分配分系统的指令、需求,分解出本地节点相关的传感器任务指令;
8.3)分解搜索、探测、跟踪及制导任务:对传感器任务进行分析,完成任务绝对坐标系转换为任务相对坐标系,明确雷达扫描参数;
9.4)生成传感器控制参数:针对搜索、跟踪及制导任务,对比传感器扫描参数,生成传感器量程、扫描宽度、扫描中心、扫描行数及雷达频组参数;
10.5)传感器任务执行:将产生的传感器控制参数通过中间件对机上和舰上的传感器进行参数调整,以完成搜索、跟踪及制导任务;
11.6)监控传感器任务执行进度:监控传感器对分配任务的执行情况;
12.7)传感器任务执行确认及评估反馈:判断传感器对分配的任务是否执行完毕、并进行任务完成度评估,若有异常向任务分配及siap系统反馈;
13.8)任务数据抽取及数据打标签:任务执行过程中,对传感器数据进行读取,并添加时戳和平台及传感器id;
14.9)传感器任务数据管理及上报:实时将数据通过中间件向在网节点进行分发,将带标签的传感器数据发送至dis分系统;
15.10)参数、指令、进度数据显示:在执行探测、跟踪及制导任务过程中,需对生成的相关参数、指令以及进度在mfd中显示,提供人机交互接口。
16.优选的,所述监控传感器状态、参数步骤中,包括如下流程:
17.1)功能模块准备;
18.2)任务系统主模式提取:任务系统主模式包括准备及维护保障主模式、导航主模式、空空拦截主模式、空空格斗主模式、空面主模式和训练模式;
19.3)明确传感器类型;
20.4)传感器状态模式及参数提取:传感器分为雷达传感器和光电传感器,针对雷达传感器需要计算雷达传感器使用功率、雷达传感器剩余资源、并将剩余资源上报was、最后提取雷达设置的参数;针对光电传感器要计算光电传感器使用功率、光电传感器剩余资源、并将剩余资源上报was、最后提取光电传感器设置的参数。
21.优选的,所述接收搜索、探测、跟踪及制导任务步骤中,包括如下流程:读取本节点id、本节点传感器id;向中间件请求探测任务计划、跟踪任务及制导任务计划表;匹配筛选本节点任务;明确传感器任务序列。
22.优选的,所述分解搜索、探测、跟踪及制导任务步骤中,包括如下流程:功能模块准备;明确本机传感器任务;划分传感器任务类,将任务类划分为分解搜索、分解跟踪和分解制导。
23.优选的,所述生成传感器控制参数步骤中,包括如下流程:
24.1)功能模块准备;
25.2)将各传感器任务绝对坐标系转化为机体轴坐标系;
26.3)传感器任务类型划分为搜索参数计算、跟踪参数计算和制导参数计算,其中:
27.所述搜索参数计算包括计算任务区域与传感器载机相对距离、匹配雷达射程、匹配方位扫描宽度、确定扫描中心、确定雷达扫描行数、半球方式选择、雷达频组选择和搜索任务区域绘制操作;
28.所述跟踪参数计算包括计算跟踪任务目标与传感器载机相对距离、匹配雷达射程、扫描宽度设为
±
10
°
、确定扫描中心、雷达扫描行数设置、半球方式选择、雷达频组选择、小区搜索到后转跟踪和跟踪任务区域绘制操作;
29.所述制导参数计算包括计算制导任务目标与传感器载机相对距离、制导目标跟踪判断、与制导武器频点号匹配和制导任务区域绘制操作。
30.优选的,所述传感器任务执行步骤中,包括如下流程:
31.1)功能模块准备;
32.2)传感器通电;
33.3)传感器故障排查;
34.4)传感器自检及准备;
35.5)接收传感器控制参数,并执行搜索、执行探测、执行跟踪和执行制导,其中:
36.所述执行搜索包括雷达模式设置为rws、设置方位扫描宽度、设置俯仰行数、半球选择、距离量程、传感器模式设置和传感器波门调整操作;
37.所述执行探测包括雷达模式设置为tas、设置方位扫描宽度、设置俯仰行数、半球选择、距离量程、传感器模式设置和传感器波门调整至任务区域操作;
38.所述执行跟踪包括雷达模式设置为tas、设置方位扫描宽度、设置俯仰行数、半球选择、距离量程、传感器模式设置、传感器波门调整至任务目标位置和传感器模式设置操
作;
39.所述执行制导包括与制导武器协调同步、雷达执行探测、雷达执行跟踪、雷达按特定周期及模式发送指令修正信号、导弹制导需求结束和退出修正指令发送操作。
40.本发明提出的面向多域作战的传感器管理及控制方法具有以下有益效果:
41.1)该方法能够实现平台传感器任务筛选处理,基于多域作战系统信息源需求、指挥官探测指令及was智能生成任务指令,筛选明确归类传感器探测、跟踪任务,为搜索与探测分系统后续任务的分配及执行提供基础支撑。
42.2)该方法能够控制平台传感器探测跟踪任务执行,根据作战系统给出的传感器任务,通过传感器作战使用研究形成任务数据库,支撑传感器使用流程及参数设定研究,进一步以三步计划实现手动、半自动及自动的传感器任务执行。
43.3)该方法能够处理搜索与探测功能模块数据,本模块带来的最大收益为实现传感器数据跨平台数据通信和交换。根据各作战单元通讯设备带宽限制,作战单元必须基于需要智能地在决策节点之间分配数据和信息,其随着作战活动和任务的改变而动态地改变。每个作战单元应以近乎实时的精度向其他单元提供本地传感器数据及情报数据。这些数据信息将为远端作战单元/传感器提供跟踪体系。
附图说明
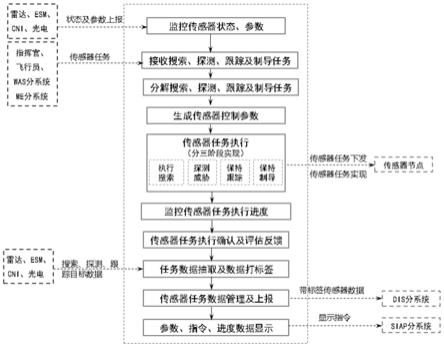
44.图1为本发明主逻辑示意图;
45.图2为本发明的监控传感器状态、参数逻辑示意图;
46.图3为本发明的分解搜索、探测、跟踪及制导任务逻辑示意图;
47.图4为本发明的生成传感器控制参数逻辑示意图;
48.图5为本发明的传感器任务执行逻辑示意图;
49.图6为本发明的参数、指令、进度数据显示逻辑示意图;
50.图7为本发明的数据提取预处理逻辑示意图。
具体实施方式
51.在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
52.根据附图所示,对本发明进行进一步说明:
53.如图1至图7所示,该方法的逻辑设计是按照三层开展,基于传感器使用决策生成使用三步实现作战系统传感器管理及协同使用。其中,决策层:实现针对传感器控制决策的生成及飞行员操作的提取;控制管理层:实现对决策的分发及实施保证;执行层:实现飞机交战区、协同交战区的传感器管理及数据分发,图1中,具体包括十个步骤。
54.1)监控传感器状态、参数:对传感器现有工作状态进行监控,基于传感器能力,实
时计算传感器任务饱和度,并反馈剩余传感器资源至任务分配系统;
55.具体如图2所示,完成在网传感器模式、当前主要参数及使用功率提取;比对传感器能力数据库中的数据;计算当前传感器任务饱和度及资源剩余;向任务分配分系统反馈计算结果。图中,监控传感器状态、参数步骤中,包括如下流程:功能模块准备;任务系统主模式提取:任务系统主模式包括准备及维护保障主模式、导航主模式、空空拦截主模式、空空格斗主模式、空面主模式和训练模式;明确传感器类型;传感器状态模式及参数提取:传感器分为雷达传感器和光电传感器,针对雷达传感器需要计算雷达传感器使用功率、雷达传感器剩余资源、并将剩余资源上报was、最后提取雷达设置的参数;针对光电传感器要计算光电传感器使用功率、光电传感器剩余资源、并将剩余资源上报was、最后提取光电传感器设置的参数。
56.2)接收搜索、探测、跟踪及制导任务:接收并解析任务分配分系统的指令、需求,分解出本地节点相关的传感器任务指令;
57.具体的,读取本节点id、本节点传感器id;向中间件请求探测任务计划、跟踪任务及制导任务计划表;匹配筛选本节点任务;明确传感器任务序列。
58.3)分解搜索、探测、跟踪及制导任务:对传感器任务进行分析,完成任务绝对坐标系转换为任务相对坐标系,明确雷达扫描参数;具体的,明确本节点id及传感器id对应的任务;将传感器任务绝对坐标系转换为任务相对坐标系;形成传感器物理扫描参数:扫描方位、预期距离及预期高度,参见图3,分解搜索、探测、跟踪及制导任务步骤中,包括如下流程:功能模块准备;明确本机传感器任务;划分传感器任务类,将任务类划分为分解搜索、分解跟踪和分解制导。
59.4)生成传感器控制参数:针对搜索、跟踪及制导任务,对比传感器扫描参数,生成传感器量程、扫描宽度、扫描中心、扫描行数及雷达频组参数;
60.具体参见图4,生成传感器控制参数步骤中,包括如下流程:功能模块准备;将各传感器任务绝对坐标系转化为机体轴坐标系;传感器任务类型划分为搜索参数计算、跟踪参数计算和制导参数计算,其中:所述搜索参数计算包括计算任务区域与传感器载机相对距离、匹配雷达射程、匹配方位扫描宽度、确定扫描中心、确定雷达扫描行数、半球方式选择、雷达频组选择和搜索任务区域绘制操作;所述跟踪参数计算包括计算跟踪任务目标与传感器载机相对距离、匹配雷达射程、扫描宽度设为
±
10
°
、确定扫描中心、雷达扫描行数设置、半球方式选择、雷达频组选择、小区搜索到后转跟踪和跟踪任务区域绘制操作;所述制导参数计算包括计算制导任务目标与传感器载机相对距离、制导目标跟踪判断、与制导武器频点号匹配和制导任务区域绘制操作。
61.5)传感器任务执行:将产生的传感器控制参数通过中间件对机上和舰上的传感器进行参数调整,以完成搜索、跟踪及制导任务。
62.具体参见图5,传感器任务执行步骤中,包括如下流程:功能模块准备;传感器通电;传感器故障排查;传感器自检及准备;接收传感器控制参数,并执行搜索、执行探测、执行跟踪和执行制导,其中:所述执行搜索包括雷达模式设置为rws、设置方位扫描宽度、设置俯仰行数、半球选择、距离量程、传感器模式设置和传感器波门调整操作;所述执行探测包括雷达模式设置为tas、设置方位扫描宽度、设置俯仰行数、半球选择、距离量程、传感器模式设置和传感器波门调整至任务区域操作;所述执行跟踪包括雷达模式设置为tas、设置方
位扫描宽度、设置俯仰行数、半球选择、距离量程、传感器模式设置、传感器波门调整至任务目标位置和传感器模式设置操作;所述执行制导包括与制导武器协调同步、雷达执行探测、雷达执行跟踪、雷达按特定周期及模式发送指令修正信号、导弹制导需求结束和退出修正指令发送操作。
63.6)监控传感器任务执行进度:监控传感器对分配任务的执行情况;
64.7)传感器任务执行确认及评估反馈:判断传感器对分配的任务是否执行完毕、并进行任务完成度评估,若有异常向任务分配及siap系统反馈;
65.8)任务数据抽取及数据打标签:任务执行过程中,对传感器数据进行读取,并添加时戳和平台及传感器id;
66.9)传感器任务数据管理及上报:实时将数据通过中间件向在网节点进行分发,将带标签的传感器数据发送至dis分系统;
67.10)参数、指令、进度数据显示:在执行探测、跟踪及制导任务过程中,需对生成的相关参数、指令以及进度在mfd中显示,提供人机交互接口。
68.需要说明的是,传感器数据预处理模块处理的数据包括2大类:传感器控制数据和传感器探测数据。对于传感器控制数据,接收上层作战服务的标准控制接口,通过识别传感器类型和型号,映射为对应传感器的控制接口,并传输至传感器或显控,若传感器返回状态数据,则更新红方平台关联的传感器信息;对于传感器探测/跟踪数据,接收其对应型号的探测数据,根据传感器类型和型号解析其出数据含义,并转换为统一的探测数据接口,存入传感器探测/跟踪信息这一分类中,并向上层作战服务输出使用,与此同时,在联网状态下在网络内共享,如图7所示。
69.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1