一种星载激光雷达在轨定标方法与流程
1.本发明属于星载激光雷达在轨定标技术领域,尤其涉及一种星载激光雷达在轨定标方法。
背景技术:
2.星载激光雷达由于卫星发射过程中的振动、卫星轨道、姿态、时标以及激光雷达地面标定的测距与指向误差,会降低激光测量结果作为高程控制的精度,因此,需要对影响精度的激光雷达参数进行在轨标定。
3.目前,国内外针对星载激光雷达采用的标定方法主要有基于地面探测器法、机载红外成像法、基于地形定标法、卫星姿态机动法等。每种方法各有优缺点,由于国产大比例尺测绘相机一般采用高稳大平台,不适合卫星姿态机动定标的方法;机载红外成像法成功率低,实施难度大;基于地面探测器法成功率大精度高,需要铺设成本高,定标周期长。
技术实现要素:
4.本发明的技术解决问题:克服现有技术的不足,提供一种星载激光雷达在轨定标方法,不依赖定标场即可实现星载激光雷达的在轨定标,可应用于星载激光雷达几何定位。
5.为了解决上述技术问题,本发明公开了一种星载激光雷达在轨定标方法,包括:
6.步骤1,选取定标区域,并在定标区域铺设靶标场;
7.步骤2,控制卫星从常规轨道机动至定标轨道;
8.步骤3,提前预报降轨段的卫星姿态轨道信息;
9.步骤4,在卫星降轨段,控制星载激光雷达在靶标场区域开机工作,根据提前预报的降轨段的卫星姿态轨道信息和靶标场的位置信息,确定卫星降轨段的激光测距值、激光光斑质心位置和激光光强在地面分布;
10.步骤5,提前预报升轨段的卫星姿态轨道信息;
11.步骤6,在卫星升轨段,控制星载激光雷达在靶标场区域开机工作,根据提前预报的升轨段的卫星姿态轨道信息和靶标场的位置信息,确定卫星升轨段的激光测距值、激光光斑质心位置和激光光强在地面分布;
12.步骤7,重复步骤3~6,在卫星降轨段和升轨段多次重访靶标场,获取多次重访测量和解算得到的数据;
13.步骤8,根据多次重访测量和解算得到的数据,进行激光指向和测距标定、出光能量标定;
14.步骤9,标定结束后,控制卫星从定标轨道机动至常规轨道。
15.在上述星载激光雷达在轨定标方法中,还包括:根据星载激光雷达的安装矩阵和卫星姿态轨道信息,确定激光足印理论位置;根据激光足印理论位置,在定标区域内铺设靶标场。
16.在上述星载激光雷达在轨定标方法中,在卫星降轨段,控制星载激光雷达在靶标
场区域开机工作,根据提前预报的降轨段的卫星姿态轨道信息和靶标场的位置信息,确定卫星降轨段的激光测距值、激光光斑质心位置和激光光强在地面分布,包括:
17.在卫星降轨段,控制星载激光雷达在靶标场区域开机工作;根据提前预报的降轨段的卫星姿态轨道信息和靶标场的位置信息,调整星载激光雷达出光时刻和小角度卫星姿态机动,使星载激光雷达开机工作时足印落到靶场靶标场;星载激光雷达出射光照射到靶标场上时将靶标点亮,测量并解算得到卫星降轨段的激光测距值、激光光斑质心位置和激光光强在地面分布;其中,小角度卫星姿态机动包括:小角度的侧摆、俯仰、偏航机动。
18.在上述星载激光雷达在轨定标方法中,在卫星升轨段,控制星载激光雷达在靶标场区域开机工作,根据提前预报的升轨段的卫星姿态轨道信息和靶标场的位置信息,确定卫星升轨段的激光测距值、激光光斑质心位置和激光光强在地面分布,包括:
19.在卫星升轨段,控制星载激光雷达在靶标场区域开机工作;根据提前预报的升轨段的卫星姿态轨道信息和靶标场的位置信息,调整星载激光雷达出光时刻和小角度卫星姿态机动,使星载激光雷达开机工作时足印落到靶场靶标场;星载激光雷达出射光照射到靶标场上时将靶标点亮,测量并解算得到卫星升轨段的激光测距值、激光光斑质心位置和激光光强在地面分布;其中,小角度卫星姿态机动包括:小角度的侧摆、俯仰、偏航机动。
20.在上述星载激光雷达在轨定标方法中,激光光斑质心位置的表达式如下:
[0021][0022]
其中,[x
spot y
spot z
spot
]
t
表示激光光斑质心位置,表示卫星质心在地固坐标系的坐标,表示国际天球参考坐标系到地固坐标系转的转换矩阵,表示卫星本体坐标系到国际天球参考坐标系的转换矩阵,表示激光发射参考点与卫星质心间的固定偏移量,ρ表示激光测距值,α和β表示激光指向安装角。
[0023]
在上述星载激光雷达在轨定标方法中,激光光强在地面分布的表达式如下:
[0024][0025]
其中,i表示位置(x,y)处的能量密度,单位为j
·
m-2
;η表示激光在大气中的单向衰减系数;ω0表示地面激光能量占比86.5%处对应的激光半径,单位为m;e0表示脉冲能量,单位为j。
[0026]
在上述星载激光雷达在轨定标方法中,激光指向和测距的误差方程表示如下:
[0027]
[0028]
其中,ρ0表示利用激光脉冲时间差计算得到的激光测距值;
[0029]
三个系数a、b、c表示如下:
[0030][0031]
测距误差δρ表示如下:
[0032][0033]
其中,δρ
x
、δρy和δρz分别为δρ的三轴分量。
[0034]
在上述星载激光雷达在轨定标方法中,星载激光雷达出光时刻调整分辨率为微秒级。
[0035]
在上述星载激光雷达在轨定标方法中,卫星从常规轨道机动至定标轨道的距离不超过20km。
[0036]
在上述星载激光雷达在轨定标方法中,卫星姿态轨道信息,包括:卫星姿态信息和卫星轨道信息;其中,卫星姿态信息通过星敏感器、星相机获取得到,卫星轨道信息通过导航接收机获取得到。
[0037]
本发明具有以下优点:
[0038]
本发明公开了一种星载激光雷达在轨定标方法,在选取的定标区域内铺设靶标场,通过卫星轨道机动进入定标轨道,通过卫星机动和激光出光时间调整,在靶标场不转运的情况下,多次快速的获取激光光斑,实现星载激光雷达的在轨定标。本发明所述的飞在轨定标方法不依赖定标场,可应用于星载激光雷达几何定位。
附图说明
[0039]
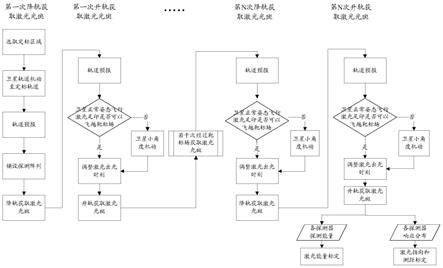
图1是本发明实施例中一种星载激光雷达在轨定标方法的步骤流程图。
具体实施方式
[0040]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
[0041]
本发明的核心思想之一在于:提供一种星载激光雷达在轨定标方法,即在选取的定标区域内铺设靶标场,通过卫星轨道机动进入定标轨道,通过卫星机动和激光出光时间调整,在靶标场不转运的情况下,多次快速的获取激光光斑,实现星载激光雷达的在轨定标。
[0042]
如图1,在本实施例中,该星载激光雷达在轨定标方法,包括:
[0043]
步骤1,选取定标区域,并在定标区域铺设靶标场。
[0044]
在本实施例中,定标区域是一个较大范围的区域,如宁夏。靶标场是一个具体位置,如某块农田、某块坡地等;可以根据星载激光雷达的安装矩阵和卫星姿态轨道信息,确定激光足印理论位置;然后,根据激光足印理论位置,在定标区域内铺设靶标场。
[0045]
步骤2,控制卫星从常规轨道机动至定标轨道。
[0046]
在本实施例中,常规轨道的升降交点位置会发生漂移,定标轨道的升降轨交点分布在规定的区域,位置相对稳定,可以实现对目标区域快速重访,故而在进行标定时,需控制卫星从常规轨道机动至定标轨道。其中,卫星从常规轨道机动至定标轨道的距离不超过20km。
[0047]
步骤3,提前预报降轨段的卫星姿态轨道信息。
[0048]
在本实施例中,卫星姿态轨道信息可以包括:卫星姿态信息和卫星轨道信息;卫星姿态信息和卫星轨道信息可以写入卫星辅助数据中,随卫星辅助数据一起下传至地面。进一步的,卫星姿态信息可以通过星敏感器、星相机获取得到;卫星轨道信息可以通过导航接收机获取得到。
[0049]
步骤4,在卫星降轨段,控制星载激光雷达在靶标场区域开机工作,根据提前预报的降轨段的卫星姿态轨道信息和靶标场的位置信息,确定卫星降轨段的激光测距值、激光光斑质心位置和激光光强在地面分布。
[0050]
在本实施例中,在卫星降轨段,控制星载激光雷达在靶标场区域开机工作;根据提前预报的降轨段的卫星姿态轨道信息和靶标场的位置信息,调整星载激光雷达出光时刻和小角度卫星姿态机动,使星载激光雷达开机工作时足印落到靶场靶标场;星载激光雷达出射光照射到靶标场上时将靶标点亮,测量并解算得到卫星降轨段的激光测距值、激光光斑质心位置和激光光强在地面分布。其中,小角度卫星姿态机动包括:小角度的侧摆、俯仰、偏航机动;星载激光雷达出光时刻调整分辨率可达微秒级。
[0051]
进一步的,激光测距值可根据星上信息获取的回波信息得到。激光光斑质心位置的获取方式通常有两种:一是将靶标响应最大的靶标位置作为激光光斑质心位置,二是将所有点亮的靶标进行拟合、加权,将最终得到的结果作为激光光斑质心位置。
[0052]
步骤5,提前预报升轨段的卫星姿态轨道信息。
[0053]
步骤6,在卫星升轨段,控制星载激光雷达在靶标场区域开机工作,根据提前预报的升轨段的卫星姿态轨道信息和靶标场的位置信息,确定卫星升轨段的激光测距值、激光光斑质心位置和激光光强在地面分布。
[0054]
在本实施例中,在卫星升轨段,控制星载激光雷达在靶标场区域开机工作;根据提前预报的升轨段的卫星姿态轨道信息和靶标场的位置信息,调整星载激光雷达出光时刻和小角度卫星姿态机动,使星载激光雷达开机工作时足印落到靶场靶标场;星载激光雷达出射光照射到靶标场上时将靶标点亮,测量并解算得到卫星升轨段的激光测距值、激光光斑质心位置和激光光强在地面分布。其中,小角度卫星姿态机动包括:小角度的侧摆、俯仰、偏航机动;星载激光雷达出光时刻调整分辨率可达微秒级。
[0055]
步骤7,重复步骤3~6,在卫星降轨段和升轨段多次重访靶标场,获取多次重访测量和解算得到的数据。
[0056]
步骤8,根据多次重访测量和解算得到的数据,进行激光指向和测距标定、出光能量标定。
[0057]
在本实施例中,激光指向和测距的误差方程表示如下:
[0058][0059]
其中,ρ0表示利用激光脉冲时间差计算得到的激光测距值;
[0060]
三个系数a、b、c表示如下:
[0061][0062]
测距误差δρ表示如下:
[0063][0064]
其中,δρ
x
、δρy和δρz分别为δρ的三轴分量。
[0065]
基于多次重访测量和解算得到的激光测距值、激光光斑质心位置等数据,结合上述激光指向和测距的误差方程,通过最小二乘法可实现激光指向和测距的标定。
[0066]
进一步的,基于多次重访测量和解算得到的激光光强在地面分布等数据,可实现对出光能量的标定:
[0067][0068]
其中,n表示有效飞过靶标场的次数。
[0069]
步骤9,标定结束后,控制卫星从定标轨道机动至常规轨道。
[0070]
在本实施例中,激光光斑质心位置的表达式如下:
[0071][0072]
其中,[x
spot y
spot z
spot
]
t
表示激光光斑质心位置,表示卫星质心在地固坐标系的坐标,表示国际天球参考坐标系到地固坐标系转的转换矩阵,表示卫星本体坐标系到国际天球参考坐标系的转换矩阵,表示激光发射参考点与卫星质心间的固定偏移量,ρ表示激光测距值,α和β表示激光指向安装角,α具体是指激光出光轴在本体坐标系xoy面投影与x轴正方向的夹角,β具体是指激光出光轴与其在xoy面的投影的夹角。
[0073]
在本实施例中,激光能量在地面呈高斯分布,因此激光光强在地面分布可以表示为:
[0074][0075]
其中,i表示位置(x,y)处的能量密度,单位为j
·
m-2
;η表示激光在大气中的单向衰减系数;ω0表示地面激光能量占比86.5%处对应的激光半径,单位为m;e0表示脉冲能量,单位为j。
[0076]
在上述实施例的基础上,下面以一个具体实例进行说明。
[0077]
s1,选取定标区域:本实施例选取宁夏北部某区域作为定标区域。
[0078]
s2,在定标区域内铺设靶标场。
[0079]
靶标场是一个具体位置,如某块农田、某块坡地等。根据星载激光雷达的安装矩阵和卫星姿态轨道信息获得激光足印理论位置,根据激光足印理论位置铺设靶标场。所述靶标场探测器位置中心为:
[0080][0081]
s3,控制卫星从常规轨道机动至定标轨道。
[0082]
常规轨道的升降交点位置发生漂移,本实施例中所述卫星的重访周期为73天,相邻轨迹在赤道上的间距为36km。卫星机动至定标轨道后,卫星间隔很短时间便可实现对目标区域快速重访;设计定标轨道如下表1所示,综合考虑重访周期与轨道调整所需燃料选择4号轨道作为定标轨道,即卫星机动1.0297km实现在降轨段4天对靶标场的重访,由于激光雷达在夜间也可以工作,为提升定标效率在卫星升轨段也安排定标工作,因此考虑升轨与降轨同时定标的模式,4天可以实现两次对靶标场的重访。
[0083]
序号轨道高度调整,km(常规轨道—定标轨道)重访周期(天)175.18562225.972133123.5249341.029745-14.04515645.764057104.29255
[0084]
表1,定标轨道设计示意表
[0085]
s4,提前预报降轨段的卫星姿态轨道信息。
[0086]
卫星机动至定标轨道后,通过星敏感器、星相机获得卫星姿态信息,通过导航接收机获取卫星轨道信息。卫星姿态信息和卫星轨道信息写入卫星辅助数据中,随激卫星辅助数据一起下传至地面。
[0087]
s5,在卫星降轨段,控制星载激光雷达在靶标场区域开机工作,根据提前预报的降轨段的卫星姿态轨道信息和靶标场的位置信息,调整星载激光雷达出光时刻和小角度卫星姿态机动,使星载激光雷达开机工作时足印落到靶场靶标场;星载激光雷达出射光照射到
靶标场上时将靶标点亮,测量并解算得到卫星降轨段的激光测距值、激光光斑质心位置和激光光强在地面分布。
[0088]
激光测距值可根据星上信息获取的回波信息得到:根据卫星获取的激光往返时间信息确定卫星到靶标场的距离值,使用大气水文、固体潮等信息对测距值进行修正以获取准确的距离值。
[0089]
激光光斑质心位置的获取方式通常有两种:方式一:将靶标响应最大的靶标位置作为激光光斑质心位置;方式二:将所有点亮的靶标进行拟合、加权,将最终得到的结果作为激光光斑质心位置。
[0090]
对于方式二,涉及的计算公式如下:
[0091][0092]
其中,ai表示第i个靶标的响应强度,(xi,yi)表示第i个靶标的位置,n表示靶标的数目。
[0093]
激光能量在地面呈高斯分布,因此激光光强在地面分布可以表示为:
[0094][0095]
其中,i可以根据得到,a表示靶标响应强度,d表示相邻靶标的间距;η在标定时结合当地气象信息提供具体值;ω0=25m;进而可以解算得到脉冲能量e0。
[0096]
s6,提前预报升轨段的卫星姿态轨道信息。与步骤s4类似,不再赘述。
[0097]
s7,在卫星升轨段,控制星载激光雷达在靶标场区域开机工作;根据提前预报的升轨段的卫星姿态轨道信息和靶标场的位置信息,调整星载激光雷达出光时刻和小角度卫星姿态机动,使星载激光雷达开机工作时足印落到靶场靶标场;星载激光雷达出射光照射到靶标场上时将靶标点亮,测量并解算得到卫星升轨段的激光测距值、激光光斑质心位置和激光光强在地面分布。
[0098]
由于轨道的漂移,当卫星再次经过靶标场上空时,激光光斑可能不会正好落到靶标场内,有两种方式可以实现调整,分别是微调星载激光雷达出光时刻和小角度卫星姿态机动。
[0099]
卫星升轨段的激光测距值、激光光斑质心位置和激光光强在地面分布的测量解算与步骤s5类似,不再赘述。
[0100]
s8,重复步骤s4~s7,在卫星降轨段和升轨段多次重访靶标场,获取多次重访测量和解算得到的数据。
[0101]
s9,根据多次重访测量和解算得到的数据,进行激光指向和测距标定、出光能量标定。
[0102]
s10,标定结束后,控制卫星从定标轨道机动至常规轨道。
[0103]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发
明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0104]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1