一种星载多波束激光测距仪在轨无场指向定标方法与流程
1.本发明属于星载激光测距仪在轨定标技术领域,尤其涉及一种星载多波束激光测距仪在轨无场指向定标方法。
背景技术:
2.星载激光测距仪由于卫星发射过程中的振动、卫星轨道、姿态、时标以及激光测距仪地面标定的测距与指向误差,会降低激光测量结果作为高程控制的精度,因此,需要对影响精度的激光测距仪参数进行在轨标定。
3.目前,国内外针对星载激光测距仪采用的标定方法主要有基于地面探测器法、机载红外成像法、基于地形定标法、卫星姿态机动法等。每种方法各有优缺点,由于国产大比例尺测绘相机一般采用高稳大平台,不适合卫星姿态机动定标的方法;机载红外成像法成功率低,实施难度大。基于地面探测器法铺设成本高,定标周期长。
4.针对卫星入轨初期靶标铺设困难的特点,提出一种星载多波束激光测距仪无场指向定标方法。
技术实现要素:
5.本发明的技术解决问题:克服现有技术的不足,提供一种星载多波束激光测距仪在轨无场指向定标方法,旨在解决卫星入轨初期靶标铺设困难的问题,是一种不依赖定标场的定标方法,可应用于星载激光测距仪几何定位。
6.为了解决上述技术问题,本发明公开了一种星载多波束激光测距仪在轨无场指向定标方法,包括:
7.步骤1,选取定标区域;
8.步骤2,获取多波束激光测距仪的理论指向角;
9.步骤3,获取在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息;
10.步骤4,根据步骤3获取的在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息,获取在轨阶段、正常飞行姿态下卫星到星下点的高度;
11.步骤5,在步骤1选取的定标区域内,多波束激光测距仪开机工作,获取在轨阶段、正常飞行姿态下卫星到定标区域的实测距离;
12.步骤6,根据步骤3~5获取的信息,构建在轨阶段、正常飞行姿态下的激光指向误差解算方程;
13.步骤7,控制卫星进行姿态机动,并构建姿态机动后的激光指向误差解算方程;
14.步骤8,根据步骤6构建的在轨阶段、正常飞行姿态下的激光指向误差解算方程和步骤7构建的姿态机动后的激光指向误差解算方程,标定多波束激光测距仪的指向偏差。
15.在上述星载多波束激光测距仪在轨无场指向定标方法中,选取的定标区域为平坦地形区域,包括:包括:海洋、湖泊、平原和草原。
16.在上述星载多波束激光测距仪在轨无场指向定标方法中,获取多波束激光测距仪
的理论指向角,包括:
17.构建笛卡尔坐标系;其中,笛卡尔坐标系的原点o定义为卫星质心;oz轴位于轨道面内,指向地心;ox轴位于轨道面内,与oz轴垂直,指向卫星速度方向;
18.在卫星发射前,根据多波束激光测距仪的安装矩阵,得到多波束激光测距仪的三波束激光的理论指向角:θ1、θ2和θ3,即oa、ob、oc与z轴的理论夹角分别为θ1、θ2和θ3;其中,点a、点b和点c分别表示多波束激光测距仪的三波束激光的光斑在海面的质心位置;e表示星下点位置,ea、eb、ec与x轴的理论夹角分别为α1、α2和α3;多波束激光测距仪的三波束激光之间的夹角∠aoc、∠boc和∠aob分别为β1、β3和β2。
19.在上述星载多波束激光测距仪在轨无场指向定标方法中,根据步骤3~5获取的信息,构建在轨阶段、正常飞行姿态下的激光指向误差解算方程,包括:
20.根据步骤3~5获取的信息,确定在轨阶段、正常飞行姿态下各点坐标分别为:
[0021][0022]
其中,θ1+δθ1、θ2+δθ2和θ3+δθ3分别表示oa、ob、oc与笛卡尔坐标系z轴的实际夹角,δθ1、δθ2和δθ3分别表示由于火箭发射振动和星地环境差异导致的θ1、θ2和θ3的偏差;α1+δα1、α2+δα2和α3+δα3分别表示ea、eb、ec与笛卡尔坐标系x轴的实际夹角,δα1、δα2和δα3分别表示由于火箭发射振动和星地环境差异导致的α1、α2和α3的偏差;h表示在轨阶段、正常飞行姿态下卫星到星下点的高度;
[0023]
在轨阶段、正常飞行姿态下,多波束激光测距仪的三波束激光之间的夹角β1、β3和β2为:
[0024][0025]
l1、l2和l3分别表示在轨阶段、正常飞行姿态下多波束激光测距仪的三波束激光的实际测距值:
[0026][0027]
由于δθ1、δθ2、δθ3、δα1、δα2、δα3均为小量,则简化得到:
[0028][0029][0030][0031]
在上述星载多波束激光测距仪在轨无场指向定标方法中,控制卫星进行姿态机动,并构建姿态机动后的激光指向误差解算方程,包括:
[0032]
子步骤71,控制卫星按照侧摆角γ进行姿态机动,获取按照侧摆角γ进行姿态机动后的卫星姿态信息和卫星轨道信息;
[0033]
子步骤72,根据按照侧摆角γ进行姿态机动后的卫星姿态信息和卫星轨道信息,获取按照侧摆角γ进行姿态机动后卫星到星下点的高度;
[0034]
子步骤73,在步骤1选取的定标区域内,多波束激光测距仪开机工作,获取按照侧摆角γ进行姿态机动后卫星到定标区域的实测距离;
[0035]
子步骤74,根据子步骤71~73获取的按照侧摆角γ进行姿态机动后的信息,构建按照侧摆角γ进行姿态机动后的激光指向误差解算方程。
[0036]
在上述星载多波束激光测距仪在轨无场指向定标方法中,根据子步骤71~73获取的按照侧摆角γ进行姿态机动后的信息,构建按照侧摆角γ进行姿态机动后的激光指向误差解算方程,包括:
[0037]
根据子步骤71~73获取的按照侧摆角γ进行姿态机动后的信息,确定按照侧摆角γ进行姿态机动后各点坐标分别为:
[0038][0039]
其中,点a
′
、点b
′
和点c
′
表示按照侧摆角γ进行姿态机动后、多波束激光测距仪的三波束激光的光斑在海面的质心位置;h
′
表示按照侧摆角γ进行姿态机动后卫星到星下点的高度;κ1、κ2和κ3分别表示:oa、ob、oc在yoz面的投影与z轴的夹角;
[0040][0041]
卫星按照侧摆角γ进行姿态机动后多波束激光测距仪的三波束激光之间的夹角保持不变:
[0042][0043]
其中,l1′
、l2′
和l3′
分别表示卫星按照侧摆角γ进行姿态机动后多波束激光测距仪的三波束激光的实际测距值:
[0044][0045]
在上述星载多波束激光测距仪在轨无场指向定标方法中,根据步骤6构建的在轨阶段、正常飞行姿态下的激光指向误差解算方程和步骤7构建的姿态机动后的激光指向误差解算方程,标定多波束激光测距仪的指向偏差,包括:联立公式(1)~(8),通过最小二乘标定多波束激光测距仪的指向偏差。
[0046]
在上述星载多波束激光测距仪在轨无场指向定标方法中,控制卫星进行姿态机动,并构建姿态机动后的激光指向误差解算方程,包括:
[0047]
子步骤75,控制卫星按照俯仰角ξ进行姿态机动,获取按照俯仰角ξ进行姿态机动后的卫星姿态信息和卫星轨道信息;
[0048]
子步骤76,根据按照俯仰角ξ进行姿态机动后的卫星姿态信息和卫星轨道信息,获取按照俯仰角ξ进行姿态机动后卫星到星下点的高度;
[0049]
子步骤77,在步骤1选取的定标区域内,多波束激光测距仪开机工作,获取按照俯仰角ξ进行姿态机动后卫星到定标区域的实测距离;
[0050]
子步骤78,根据子步骤75~77获取的按照俯仰角ξ进行姿态机动后的信息,构建按照俯仰角ξ进行姿态机动后的激光指向误差解算方程。
[0051]
在上述星载多波束激光测距仪在轨无场指向定标方法中,根据子步骤75~77获取的按照俯仰角ξ进行姿态机动后的信息,构建按照俯仰角ξ进行姿态机动后的激光指向误差解算方程,包括:
[0052]
根据子步骤75~77获取的按照俯仰角ξ进行姿态机动后的信息,确定按照俯仰角ξ进行姿态机动后各点坐标分别为:
[0053][0054]
其中,点a
′
、点b
′
和点c
′
表示按照俯仰角ξ进行姿态机动后、多波束激光测距仪的三波束激光的光斑在海面的质心位置;h
′
表示按照俯仰角ξ进行姿态机动后卫星到星下点的高度;κ1、κ2和κ3分别表示:oa、ob、oc在yoz面的投影与z轴的夹角;
[0055][0056]
卫星按照俯仰角ξ进行姿态机动后多波束激光测距仪的三波束激光之间的夹角保持不变:
[0057][0058]
其中,l
′1、l
′2和l
′3分别表示卫星按照俯仰角ξ进行姿态机动后多波束激光测距仪的三波束激光的实际测距值:
[0059][0060]
在上述星载多波束激光测距仪在轨无场指向定标方法中,根据步骤6构建的在轨阶段、正常飞行姿态下的激光指向误差解算方程和步骤7构建的姿态机动后的激光指向误差解算方程,标定多波束激光测距仪的指向偏差,包括:联立公式(1)~(5)、(9)~(11),通过最小二乘标定多波束激光测距仪的指向偏差。
[0061]
本发明具有以下优点:
[0062]
本发明公开了一种星载多波束激光测距仪在轨无场指向定标方法,选取平坦区域,通过卫星进行不同的姿态机动,利用获得的卫星姿态轨道信息和不同机动条件下的激光测距值,标定多波束激光测距仪的指向偏差;是一种不依赖定标场的定标方法,解决了卫星入轨初期靶标铺设困难的问题,可应用于星载激光测距仪几何定位。
附图说明
[0063]
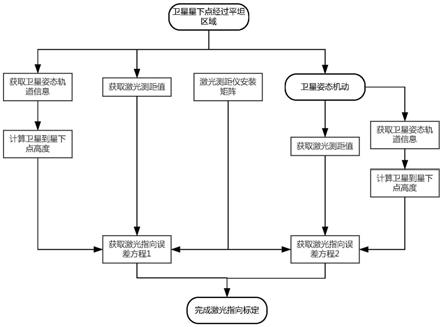
图1是本发明实施例中一种星载多波束激光测距仪在轨无场指向定标方法的步骤流程图;
[0064]
图2是本发明实施例中一种卫星正常姿态下、星载多波束激光测距仪指向的几何
关系示意图;
[0065]
图3是本发明实施例中一种卫星进行侧摆机动时、星载多波束激光测距仪某通道激光指向的几何关系示意图;
[0066]
图4是本发明实施例中一种卫星进行俯仰机动时、星载多波束激光测距仪某通道激光指向的几何关系示意图。
具体实施方式
[0067]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
[0068]
实施例1
[0069]
在本实施例中,公开了一种星载多波束激光测距仪在轨无场指向定标方法,选取平坦区域,通过卫星进行不同的姿态机动,利用获得的卫星姿态轨道信息和不同机动条件下的激光测距值,处理得到激光指向误差。
[0070]
如图1,该星载多波束激光测距仪在轨无场指向定标方法,包括:
[0071]
步骤1,选取定标区域。选取的定标区域为平坦地形区域,包括但不仅限于:海洋、湖泊、平原和草原。
[0072]
步骤2,获取多波束激光测距仪的理论指向角。其中,多波束激光测距仪的理论指向角可通过多波束激光测距仪的安装矩阵确定。
[0073]
步骤3,获取在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息。其中,卫星姿态信息可以通过星敏感器、星相机测量得到,卫星轨道信息可通过导航接收机测量得到。
[0074]
步骤4,根据步骤3获取的在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息,获取在轨阶段、正常飞行姿态下卫星到星下点的高度。
[0075]
步骤5,在步骤1选取的定标区域内,多波束激光测距仪开机工作,获取在轨阶段、正常飞行姿态下卫星到定标区域的实测距离。其中,实测距离是指:多波束激光测距仪向定标区域发送激光,并接收定标区域的返回激光,进而确定卫星到定标区域的实测距离。
[0076]
步骤6,将卫星进行一定角度姿态机动,获取姿态机动后的卫星姿态信息和卫星轨道信息。其中,一定角度姿态机动包括但不仅限于:按照不同角度的侧摆角、俯仰角和/或偏航角进行机动。卫星进行一定角度姿态机动后,多波束激光测距仪的三波束激光之间的夹角保持不变。
[0077]
步骤7,根据步骤6获取的姿态机动后的卫星姿态信息和卫星轨道信息姿态机动后的卫星姿态信息和卫星轨道信息,获取姿态机动后卫星到星下点的高度。
[0078]
步骤8,在步骤1选取的定标区域内,多波束激光测距仪开机工作,获取姿态机动后卫星到定标区域的实测距离。
[0079]
步骤9,根据步骤4、5、6、8获取的信息,采用最小二乘法标定多波束激光测距仪的指向偏差。
[0080]
实施例2
[0081]
在本实施例中,该星载多波束激光测距仪在轨无场指向定标方法,包括:
[0082]
步骤1,选取定标区域。
[0083]
在本实施例中,选取用于定标的区域为里海,通过查询气象信息,在里海海面定标时天气晴朗无云层遮挡,海面风浪较小,浪高小于1m。
[0084]
步骤2,获取多波束激光测距仪的理论指向角。
[0085]
在本实施例中,步骤2的具体实现如下:构建笛卡尔坐标系。其中,笛卡尔坐标系的原点o定义为卫星质心;oz轴位于轨道面内,指向地心;ox轴位于轨道面内,与oz轴垂直,指向卫星速度方向。
[0086]
如图2,在卫星发射前,根据多波束激光测距仪的安装矩阵,得到多波束激光测距仪的三波束激光的理论指向角:θ1、θ2和θ3,即oa、ob、oc与z轴的理论夹角分别为θ1、θ2和θ3。其中,点a、点b和点c分别表示多波束激光测距仪的三波束激光的光斑在海面的质心位置;e表示星下点位置,ea、eb、ec与x轴的理论夹角分别为α1、α2和α3。多波束激光测距仪的三波束激光之间的夹角∠aoc、∠boc和∠aob分别为β1、β3和β2。
[0087]
根据卫星射前测量结果可知:
[0088]
[θ
1 θ
2 θ3]=[2.03268
°ꢀ
2.16974
°ꢀ
2.01428
°
]
[0089]
[α
1 α
2 α3]=[90.24780
°ꢀ
92.16763
°ꢀ
90.04802
°
]
[0090]
[β
1 β
2 β3]=[4.04695
°ꢀ
4.18324
°ꢀ
4.20149
°
]
[0091]
其中,需要说明的是,由于在轨阶段由于火箭发射振动和星地环境差异,多波束激光测距仪的实际指向角与理论指向角存在偏差,多波束激光测距仪的实际指向角可以表示为:θ1+δθ1、θ2+δθ2和θ3+δθ3,即θ1+δθ1、θ2+δθ2和θ3+δθ3分别表示oa、ob、oc与笛卡尔坐标系z轴的实际夹角;δθ1、δθ2和δθ3分别表示由于火箭发射振动和星地环境差异导致的θ1、θ2和θ3的偏差。进一步的,ea、eb、ec与笛卡尔坐标系x轴的实际夹角分别为α1+δα1、α2+δα2和α3+δα3,δα1、δα2和δα3分别表示由于火箭发射振动和星地环境差异导致的α1、α2和α3的偏差。此外,由于分系统自身的稳定性,波束激光之间的夹角β1、β3和β2始终保持不变。
[0092]
步骤3,获取在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息。
[0093]
在本实施例中,可以将获取的在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息写入卫星辅助数据中,随激光数据一起下传至地面。
[0094]
步骤4,根据步骤3获取的在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息,获取在轨阶段、正常飞行姿态下卫星到星下点的高度。
[0095]
在本实施例中,在轨阶段、正常飞行姿态下卫星到星下点的高度h序列如下表1所示:
[0096]
序号高度h(m)1491992.3
…………
n491783.7n+1491762.7
[0097]
表1
[0098]
步骤5,在步骤1选取的定标区域内,多波束激光测距仪开机工作,获取在轨阶段、正常飞行姿态下卫星到定标区域的实测距离。
[0099]
步骤6,根据步骤3~5获取的信息,构建在轨阶段、正常飞行姿态下的激光指向误差解算方程。
[0100]
在本实施例中,在轨阶段、正常飞行姿态下的激光指向误差解算方程的构建过程具体如下:
[0101]
根据步骤3~5获取的信息,确定在轨阶段、正常飞行姿态下各点坐标分别为:
[0102][0103]
由于分系统自身的稳定性,波束激光之间的夹角β1、β3和β2保持不变,即在轨阶段、正常飞行姿态下,多波束激光测距仪的三波束激光之间的夹角为:
[0104][0105]
l1、l2和l3分别表示在轨阶段、正常飞行姿态下多波束激光测距仪的三波束激光的实际测距值(即,oa、ob和oc的值):
[0106][0107]
在轨阶段、正常飞行姿态下l1、l2和l3序列如下表2所示:
[0108]
序号l1(m)l2(m)l3(m)1492369.7251492363.666492281.7495
……………………
n492149.4492143.3492061.7n+1492139.0492132.7492051.4
[0109]
表2
[0110]
由于δθ1、δθ2、δθ3、δα1、δα2、δα3均为小量,则简化得到:
[0111][0112]
[0113][0114]
步骤7,控制卫星进行姿态机动,并构建姿态机动后的激光指向误差解算方程。
[0115]
在本实施例中,如图3,以侧摆角γ进行姿态机动为例,有:
[0116]
子步骤71,控制卫星按照侧摆角γ进行姿态机动,获取按照侧摆角γ进行姿态机动后的卫星姿态信息和卫星轨道信息。例如,γ=3.5
°
。
[0117]
子步骤72,根据按照侧摆角γ进行姿态机动后的卫星姿态信息和卫星轨道信息,获取按照侧摆角γ进行姿态机动后卫星到星下点的高度。
[0118]
优选的,按照侧摆角γ进行姿态机动后卫星到星下点的高度h
′
序列如下表3所示:
[0119]
序号高度h
′
(m)1488901.4
…………
n488619.9n+1498601.1
[0120]
表3
[0121]
子步骤73,在步骤1选取的定标区域内,多波束激光测距仪开机工作,获取按照侧摆角γ进行姿态机动后卫星到定标区域的实测距离。
[0122]
优选的,卫星按照侧摆角γ进行姿态机动后多波束激光测距仪的三波束激光的实际测距值l
′1、l
′2和l
′3序列如下表4所示:
[0123]
序号l
′1(m)l
′2(m)l
′3(m)1490362.5488697.7487504.2
……………………
n490064.3488428.2487320.8n+1490044.3488412.5487242.9
[0124]
表4
[0125]
子步骤74,根据子步骤71~73获取的按照侧摆角γ进行姿态机动后的信息,构建按照侧摆角γ进行姿态机动后的激光指向误差解算方程。
[0126]
优选的,根据子步骤71~73获取的按照侧摆角γ进行姿态机动后的信息,确定按照侧摆角γ进行姿态机动后各点坐标分别为:
[0127][0128]
其中,点a
′
、点b
′
和点c
′
表示按照侧摆角γ进行姿态机动后、多波束激光测距仪的三波束激光的光斑在海面的质心位置;κ1、κ2和κ3分别表示:oa、ob、oc在yoz面的投影与z轴
的夹角。
[0129][0130]
卫星按照侧摆角γ进行姿态机动后多波束激光测距仪的三波束激光之间的夹角保持不变:
[0131][0132][0133]
步骤8,根据步骤6构建的在轨阶段、正常飞行姿态下的激光指向误差解算方程和步骤7构建的姿态机动后的激光指向误差解算方程,标定多波束激光测距仪的指向偏差。
[0134]
在本实施例中,最终确定的误差项为:δθ1、δθ2、δθ3、δα1、δα2、δα3,即可以联立公式(1)~(8),通过最小二乘标定多波束激光测距仪的指向偏差。
[0135]
实施例3
[0136]
在本实施例中,该星载多波束激光测距仪在轨无场指向定标方法,包括:
[0137]
步骤1,选取定标区域。
[0138]
在本实施例中,选取用于定标的区域为里海,通过查询气象信息,在里海海面定标时天气晴朗无云层遮挡,海面风浪较小,浪高小于1m。
[0139]
步骤2,获取多波束激光测距仪的理论指向角。
[0140]
在本实施例中,步骤2的具体实现如下:
[0141]
构建笛卡尔坐标系。其中,笛卡尔坐标系的原点o定义为卫星质心;oz轴位于轨道面内,指向地心;ox轴位于轨道面内,与oz轴垂直,指向卫星速度方向。
[0142]
如图2~4,在卫星发射前,根据多波束激光测距仪的安装矩阵,得到多波束激光测距仪的三波束激光的理论指向角:θ1、θ2和θ3,即oa、ob、oc与z轴的理论夹角分别为θ1、θ2和θ3。其中,点a、点b和点c分别表示多波束激光测距仪的三波束激光的光斑在海面的质心位置;e表示星下点位置,ea、eb、ec与x轴的理论夹角分别为α1、α2和α3。多波束激光测距仪的三波束激光之间的夹角∠aoc、∠boc和∠aob分别为β1、β3和β2。
[0143]
根据卫星射前测量结果可知:
[0144]
[θ
1 θ
2 θ3]=[2.03268
°ꢀ
2.16974
°ꢀ
2.01428
°
]
[0145]
[α
1 α
2 α3]=[90.24780
°ꢀ
92.16763
°ꢀ
90.04802
°
]
[0146]
[β
1 β
2 β3]=[4.04695
°ꢀ
4.18324
°ꢀ
4.20149
°
]
[0147]
其中,需要说明的是,由于在轨阶段由于火箭发射振动和星地环境差异,多波束激光测距仪的实际指向角与理论指向角存在偏差,多波束激光测距仪的实际指向角可以表示为:θ1+δθ1、θ2+δθ2和θ3+δθ3,即θ1+δθ1、θ2+δθ2和θ3+δθ3分别表示oa、ob、oc与笛卡尔坐标系z轴的实际夹角;δθ1、δθ2和δθ3分别表示由于火箭发射振动和星地环境差异导致的θ1、θ2和θ3的偏差。进一步的,ea、eb、ec与笛卡尔坐标系x轴的实际夹角分别为α1+δα1、α2+δα2和α3+δα3,δα1、δα2和δα3分别表示由于火箭发射振动和星地环境差异导致的α1、α2和α3的偏差。此外,由于分系统自身的稳定性,波束激光之间的夹角β1、β3和β2始终保持不变。
[0148]
步骤3,获取在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息。
[0149]
在本实施例中,可以将获取的在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息写入卫星辅助数据中,随激光数据一起下传至地面。
[0150]
步骤4,根据步骤3获取的在轨阶段、正常飞行姿态下的卫星姿态信息和卫星轨道信息,获取在轨阶段、正常飞行姿态下卫星到星下点的高度。
[0151]
步骤5,在步骤1选取的定标区域内,多波束激光测距仪开机工作,获取在轨阶段、正常飞行姿态下卫星到定标区域的实测距离。
[0152]
步骤6,根据步骤3~5获取的信息,构建在轨阶段、正常飞行姿态下的激光指向误差解算方程。
[0153]
在本实施例中,在轨阶段、正常飞行姿态下的激光指向误差解算方程的构建过程具体如下:根据步骤3~5获取的信息,确定在轨阶段、正常飞行姿态下各点坐标分别为:
[0154][0155]
其中,h表示在轨阶段、正常飞行姿态下卫星到星下点的高度。
[0156]
由于分系统自身的稳定性,波束激光之间的夹角β1、β3和β2保持不变,即在轨阶段、正常飞行姿态下,多波束激光测距仪的三波束激光之间的夹角为:
[0157][0158]
l1、l2和l3分别表示在轨阶段、正常飞行姿态下多波束激光测距仪的三波束激光的实际测距值(即,oa、ob和oc的值):
[0159][0160]
由于δθ1、δθ2、δθ3、δα1、δα2、δα3均为小量,则简化得到:
[0161][0162][0163][0164]
步骤7,控制卫星进行姿态机动,并构建姿态机动后的激光指向误差解算方程。
[0165]
在本实施例中,如图4,以俯仰角ξ进行姿态机动为例,有:
[0166]
子步骤75,控制卫星按照俯仰角ξ进行姿态机动,获取按照俯仰角ξ进行姿态机动后的卫星姿态信息和卫星轨道信息。例如,ξ=3.5
°
。
[0167]
子步骤76,根据按照俯仰角ξ进行姿态机动后的卫星姿态信息和卫星轨道信息,获取按照俯仰角ξ进行姿态机动后卫星到星下点的高度。
[0168]
优选的,按照侧摆角ξ进行姿态机动后卫星到星下点的高度h
′
序列如下表5所示:
[0169]
序号高度h
′
(m)1483873.1
…………
n488321.9n+1493332.3
[0170]
表5
[0171]
子步骤77,在步骤1选取的定标区域内,多波束激光测距仪开机工作,获取按照俯仰角ξ进行姿态机动后卫星到定标区域的实测距离。
[0172]
优选的,卫星按照俯仰角ξ进行姿态机动后多波束激光测距仪的三波束激光的实际测距值l
′1、l
′2和l
′3序列如下表6所示:
[0173]
序号l
′1(m)l
′2(m)l
′3(m)1490232.3482245.7484534.4
……………………
n494334.3489533.1489330.3n+1490332.2488331.1487184.1
[0174]
表6
[0175]
子步骤78,根据子步骤75~77获取的按照俯仰角ξ进行姿态机动后的信息,构建按照俯仰角ξ进行姿态机动后的激光指向误差解算方程。
[0176]
优选的,根据子步骤75~77获取的按照俯仰角ξ进行姿态机动后的信息,确定按照俯仰角ξ进行姿态机动后各点坐标分别为:
[0177][0178]
其中,点a
′
、点b
′
和点c
′
表示按照俯仰角ξ进行姿态机动后、多波束激光测距仪的三波束激光的光斑在海面的质心位置;h
′
表示按照俯仰角ξ进行姿态机动后卫星到星下点的高度;κ1、κ2和κ3分别表示:oa、ob、oc在yoz面的投影与z轴的夹角。
[0179][0180]
卫星按照俯仰角ξ进行姿态机动后多波束激光测距仪的三波束激光之间的夹角保持不变:
[0181][0182][0183]
步骤8,根据步骤6构建的在轨阶段、正常飞行姿态下的激光指向误差解算方程和步骤7构建的姿态机动后的激光指向误差解算方程,标定多波束激光测距仪的指向偏差。
[0184]
在本实施例中,最终确定的误差项为:δθ1、δθ2、δθ3、δα1、δα2、δα3,即可以联立公式(1)~(5)、(9)~(11),通过最小二乘标定多波束激光测距仪的指向偏差。
[0185]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0186]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1