一种机器人电池监测系统及监测方法与流程
1.本发明涉及机器人控制领域,尤其涉及一种机器人电池监测系统及监测方法。
背景技术:
2.随着时代发展,人类进入了智能化时代,越来越多的ai机器人进入了生产生活的一线;但是由于机器人的工作离不开电池,而目前的电池往往存在自燃、爆炸等安全隐患,如果不能及时发现,会造成不可估计的损失;当前来说,一般监测电池的方法无外乎监测温度或者气体含量等。
3.例如申请号cn202010380881.x公开了一种电池热失控的监测、预防及安全保护系统,包括高温报警监测部分、热失控预防抢救部分、热失控安全保护部分、电源和控制器,电池分别连接在高温温度监测链上和预防抢救温度监测链上,热失控预防抢救部分的连接电路上设置热失控安全保护部分的压力监测装置,声光报警器、热失控预防抢救部分的驱动泵、消防系统分别连接控制器。申请号cn202010806822.4公开了一种新能源汽车用动力电池包安全性监测系统,包括用于检测动力电池包内部温度的环境温度传感器、用于检测动力电池包内部烟雾浓度的烟雾传感器、用于检测动力电池包内冷却液液面高度的漏液传感器、用于检测液冷系统进水口处冷却液温度的第一温度传感器和用于检测液冷系统出水口处冷却液温度的第二温度传感器,但是这些都是在已经发生危险之后才能灵敏的判断,预防性不足;
技术实现要素:
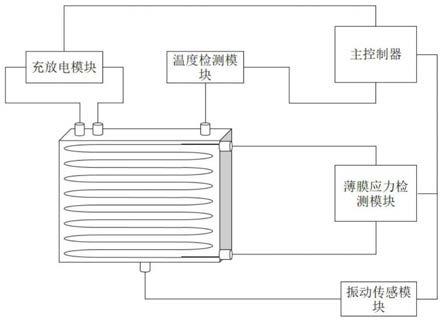
4.针对上述内容,为解决上述问题,提供一种机器人电池监测系统,包括电池包、主控制器、充放电模块、温度检测模块、振动传感模块和薄膜应力检测模块;
5.充放电模块、温度检测模块、振动传感模块和薄膜应力检测模块连接至主控制器;
6.充放电模块用于对电池包进行充放电同时检测充放电模块的电压和电流的变化,并将实时电压和电流数据发送给主控制器;
7.温度检测模块实时检测电池包的内部温度,并将实时检测的温度发送给主控制器;
8.振动传感模块实时检测电池包的振动加速度,并将检测的振动数据发送给主控制器;
9.薄膜应力检测模块实时检测电池包表面的应力变化,并将应力检测数据发送给主控制器;
10.主控制器实时采集电压、电流、温度、振动和应力数据,并将其输入危险系数检测模型,危险系数检测模型根据输入的数据计算危险系数,当电池包的危险系数超过阈值时主控制器进行警报,同时对外显示显示电压、电流、温度、振动和应力数据。
11.温度检测模块为外部封闭绝缘导热陶瓷薄膜的贴片型热电偶温度传感器;工作温度范围为-25℃至275℃,分辨率0.2℃,精度
±
0.2℃。
12.振动传感器为三轴振动加速度传感器,能够同时测量xyz三个方向上的振动加速度,并输出振动波形。
13.应力检测模块包括应力检测控制器和应力传感薄膜,应力传感薄膜铺设在电池包的表面上,当电池包表面产生应力时,应力传感器薄膜对外输出应力的大小。
14.应力传感器薄膜为掺杂p(vdf-trfe)型应力传感薄膜,掺杂材料为tio2,具体的制作方法如下:
15.1)制备p(vdf-trfe)溶液,p(vdf-trfe)溶液中的溶质为p(vdf-trfe)粉,溶剂为dmso,制备过程中将tio2粉末掺入,tio2粉末为纳米粉末,粒径为3-5nm,掺入量为p(vdf-trfe)溶液质量的5%;p(vdf-trfe)溶液的浓度为质量百分比10-20%,;
16.2)将p(vdf-trfe)溶液涂在玻璃基片上,玻璃基片的形状为“弓”字形,烘干后剥离,得厚度为10微米以内的p(vdf-trfe)“弓”字形薄膜。
17.3)将薄膜退火,退火温度为130-150℃,持续时间为5-10小时,将退火后的薄膜两端设置电极,得到应力传感器薄膜。
18.危险系数检测模型具体为:
19.主控制器提取电压u、电流i、温度t、振幅a和应力f数据随时间的变化曲线,然后求取从当前时刻向前一段时间内的电压u、电流i、温度t、振幅a和应力f曲线的一阶导数曲线;
20.然后计算该时间段内的电压u、电流i、温度t、振幅a和应力f曲线的一阶导数曲线的最大值:u
m’、i
m’、t
m’、a
m’和f
m’;
21.主控制器提取从当前时刻向前一段时间内的振动曲线,并对振动曲线进行傅里叶变换,得到振动频谱曲线;主控制器提取振动频谱曲线的峰值频率f
p
、峰值频率的强度a
p
、峰值频率的半高宽h
p
、电池包共振频率fg位置处的强度ag、峰值频率和电池包共振频率的差值
△
f;
22.主控制器首先计算u
m’、i
m’、t
m’、a
m’、f
m’是否超过各自的阈值,如果没有超过阈值则令k0=0,如果有则令k0=x,其中x为超过阈值的参数的个数,最多为5个;
23.然后主控制器将f
p
、a
p
、h
p
、ag、
△
f输入如下计算式得到危险系数;
[0024][0025]
其中
△
f=|f
p-fg|;k1为系数,根据经验获得;上述公式为经验公式,η为危险系数;
[0026]
设η0为阈值,当η》η0时主控制器进行警报,同时对外显示显示电压、电流、温度、振动和应力数据。
[0027]
一种利用机器人电池监测系统进行电池监测的方法,包括如下步骤:
[0028]
步骤1、将充放电模块、温度检测模块、振动传感模块和薄膜应力检测模块连接至主控制器
[0029]
步骤2、设置η0、k1的系数;
[0030]
步骤3、充放电模块对电池包进行充放电同时检测充放电模块的电压和电流的变化,并将实时电压和电流数据发送给主控制器;温度检测模块实时检测电池包的内部温度,并将实时检测的温度发送给主控制器;振动传感模块实时检测电池包的振动加速度,并将检测的振动数据发送给主控制器;薄膜应力检测模块实时检测电池包表面的应力变化,并将应力检测数据发送给主控制器;
[0031]
步骤4、主控制器提取电压u、电流i、温度t、振幅a和应力f数据随时间的变化曲线,然后求取从当前时刻向前一段时间内的电压u、电流i、温度t、振幅a和应力f曲线的一阶导数曲线;
[0032]
然后计算该时间段内的电压u、电流i、温度t、振幅a和应力f曲线的一阶导数曲线的最大值:u
m’、i
m’、t
m’、a
m’和f
m’;
[0033]
主控制器提取从当前时刻向前一段时间内的振动曲线,并对振动曲线进行傅里叶变换,得到振动频谱曲线;主控制器提取振动频谱曲线的峰值频率f
p
、峰值频率的强度a
p
、峰值频率的半高宽h
p
、电池包共振频率fg位置处的强度ag、峰值频率和电池包共振频率的差值
△
f;
[0034]
主控制器首先计算u
m’、i
m’、t
m’、a
m’、f
m’是否超过各自的阈值,如果没有超过阈值则令k0=0,如果有则令k0=x,其中x为超过阈值的参数的个数,最多为5个;
[0035]
然后主控制器将f
p
、a
p
、h
p
、ag、
△
f输入如下计算式得到危险系数;
[0036][0037]
其中
△
f=|f
p-fg|;k1为系数,根据经验获得;上述公式为经验公式,η为危险系数;
[0038]
设η0为阈值,当η》η0时主控制器进行警报,同时对外显示显示电压、电流、温度、振动和应力数据。
[0039]
本发明的有益效果为:
[0040]
本发明在电池表面内设置多种传感器,采集电压、电流、温度、振动和应力数据,并将其输入危险系数检测模型,首次实现将其进行综合评价,评价更加准确,尤其采用了计算时间段内的电压u、电流i、温度t、振幅a和应力f曲线的一阶导数曲线的最大值,可以在具有危险隐患时就发现危险,提前进行警报,从而及时检修,避免危险事故的发生;
[0041]
在进行危险系数计算时先计算u
m’、i
m’、t
m’、a
m’、f
m’是否超过各自的阈值,然后再根据实际的振动情况进行危险系数的评价,将传统的监测系数和振动监测结合起来,监测更加灵敏,且由于振动和冲击是电池发生危险的主要诱因,因此可以更加灵敏的对危险进行预警;
[0042]
传感器薄膜为掺杂p(vdf-trfe)型应力传感薄膜,掺杂材料为tio2,应力传感更加精准,监测能耗更低。
附图说明
[0043]
图1为本发明的整体架构示意图。
具体实施方式
[0044]
本发明的优点、特征以及达成所述目的的方法通过附图及后续的详细说明将会明确。
[0045]
实施例1:
[0046]
一种机器人电池监测系统,包括电池包、主控制器、充放电模块、温度检测模块、振动传感模块和薄膜应力检测模块;
[0047]
充放电模块、温度检测模块、振动传感模块和薄膜应力检测模块连接至主控制器;
[0048]
充放电模块用于对电池包进行充放电同时检测充放电模块的电压和电流的变化,并将实时电压和电流数据发送给主控制器;
[0049]
温度检测模块实时检测电池包的内部温度,并将实时检测的温度发送给主控制器;
[0050]
振动传感模块实时检测电池包的振动加速度,并将检测的振动数据发送给主控制器;
[0051]
薄膜应力检测模块实时检测电池包表面的应力变化,并将应力检测数据发送给主控制器;
[0052]
主控制器实时采集电压、电流、温度、振动和应力数据,并将其输入危险系数检测模型,危险系数检测模型根据输入的数据计算危险系数,当电池包的危险系数超过阈值时主控制器进行警报,同时对外显示显示电压、电流、温度、振动和应力数据。
[0053]
温度检测模块为外部封闭绝缘导热陶瓷薄膜的贴片型热电偶温度传感器;工作温度范围为-25℃至275℃,分辨率0.2℃,精度
±
0.2℃。
[0054]
振动传感器为三轴振动加速度传感器,能够同时测量xyz三个方向上的振动加速度,并输出振动波形。
[0055]
应力检测模块包括应力检测控制器和应力传感薄膜,应力传感薄膜铺设在电池包的表面上,当电池包表面产生应力时,应力传感器薄膜对外输出应力的大小。
[0056]
应力传感器薄膜为掺杂p(vdf-trfe)型应力传感薄膜,掺杂材料为tio2,具体的制作方法如下:
[0057]
1)制备p(vdf-trfe)溶液,p(vdf-trfe)溶液中的溶质为p(vdf-trfe)粉,溶剂为dmso,制备过程中将tio2粉末掺入,tio2粉末为纳米粉末,粒径为3nm,掺入量为p(vdf-trfe)溶液质量的5%;p(vdf-trfe)溶液的浓度为质量百分比10%,;
[0058]
2)将p(vdf-trfe)溶液涂在玻璃基片上,玻璃基片的形状为“弓”字形,烘干后剥离,得厚度为10微米以内的p(vdf-trfe)“弓”字形薄膜。
[0059]
3)将薄膜退火,退火温度为130℃,持续时间为5小时,将退火后的薄膜两端设置电极,得到应力传感器薄膜。
[0060]
危险系数检测模型具体为:
[0061]
主控制器提取电压u、电流i、温度t、振幅a和应力f数据随时间的变化曲线,然后求取从当前时刻向前一段时间内的电压u、电流i、温度t、振幅a和应力f曲线的一阶导数曲线;
[0062]
然后计算该时间段内的电压u、电流i、温度t、振幅a和应力f曲线的一阶导数曲线的最大值:u
m’、i
m’、t
m’、a
m’和f
m’;
[0063]
主控制器提取从当前时刻向前一段时间内的振动曲线,并对振动曲线进行傅里叶变换,得到振动频谱曲线;主控制器提取振动频谱曲线的峰值频率f
p
、峰值频率的强度a
p
、峰值频率的半高宽h
p
、电池包共振频率fg位置处的强度ag、峰值频率和电池包共振频率的差值
△
f;
[0064]
主控制器首先计算u
m’、i
m’、t
m’、a
m’、f
m’是否超过各自的阈值,如果没有超过阈值则令k0=0,如果有则令k0=x,其中x为超过阈值的参数的个数,最多为5个;
[0065]
然后主控制器将f
p
、a
p
、h
p
、ag、
△
f输入如下计算式得到危险系数;
[0066][0067]
其中
△
f=|f
p-fg|;k1为系数,根据经验获得;上述公式为经验公式,η为危险系数;
[0068]
设η0为阈值,当η》η0时主控制器进行警报,同时对外显示显示电压、电流、温度、振动和应力数据。
[0069]
实施例2:
[0070]
进一步的应力传感器薄膜为掺杂p(vdf-trfe)型应力传感薄膜,掺杂材料为tio2,具体的制作方法如下:
[0071]
1)制备p(vdf-trfe)溶液,p(vdf-trfe)溶液中的溶质为p(vdf-trfe)粉,溶剂为dmso,制备过程中将tio2粉末掺入,tio2粉末为纳米粉末,粒径为5nm,掺入量为p(vdf-trfe)溶液质量的5%;p(vdf-trfe)溶液的浓度为质量百分比20%,;
[0072]
2)将p(vdf-trfe)溶液涂在玻璃基片上,玻璃基片的形状为“弓”字形,烘干后剥离,得厚度为10微米以内的p(vdf-trfe)“弓”字形薄膜。
[0073]
3)将薄膜退火,退火温度为150℃,持续时间10小时,将退火后的薄膜两端设置电极,得到应力传感器薄膜。
[0074]
实施例3:
[0075]
一种利用机器人电池监测系统进行电池监测的方法,包括如下步骤:
[0076]
步骤1、将充放电模块、温度检测模块、振动传感模块和薄膜应力检测模块连接至主控制器
[0077]
步骤2、设置η0、k1的系数;
[0078]
步骤3、充放电模块对电池包进行充放电同时检测充放电模块的电压和电流的变化,并将实时电压和电流数据发送给主控制器;温度检测模块实时检测电池包的内部温度,并将实时检测的温度发送给主控制器;振动传感模块实时检测电池包的振动加速度,并将检测的振动数据发送给主控制器;薄膜应力检测模块实时检测电池包表面的应力变化,并将应力检测数据发送给主控制器;
[0079]
步骤4、主控制器提取电压u、电流i、温度t、振幅a和应力f数据随时间的变化曲线,然后求取从当前时刻向前一段时间内的电压u、电流i、温度t、振幅a和应力f曲线的一阶导数曲线;
[0080]
然后计算该时间段内的电压u、电流i、温度t、振幅a和应力f曲线的一阶导数曲线的最大值:u
m’、i
m’、t
m’、a
m’和f
m’;
[0081]
主控制器提取从当前时刻向前一段时间内的振动曲线,并对振动曲线进行傅里叶变换,得到振动频谱曲线;主控制器提取振动频谱曲线的峰值频率f
p
、峰值频率的强度a
p
、峰值频率的半高宽h
p
、电池包共振频率fg位置处的强度ag、峰值频率和电池包共振频率的差值
△
f;
[0082]
主控制器首先计算u
m’、i
m’、t
m’、a
m’、f
m’是否超过各自的阈值,如果没有超过阈值则令k0=0,如果有则令k0=x,其中x为超过阈值的参数的个数,最多为5个;
[0083]
然后主控制器将f
p
、a
p
、h
p
、ag、
△
f输入如下计算式得到危险系数;
[0084]
[0085]
其中
△
f=|f
p-fg|;k1为系数,根据经验获得;上述公式为经验公式,η为危险系数;
[0086]
设η0为阈值,当η》η0时主控制器进行警报,同时对外显示显示电压、电流、温度、振动和应力数据。
[0087]
以上所述,仅为本发明的优选实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1