一种入射角自动反馈调节装置的制作方法
1.本实用新型属于道路交通标线的快速检测领域。
背景技术:
2.车载标线测量仪:应用光源发光照射待测标线和感光探测器采集逆反射光来计算标线逆反射亮度系数的车载设备,其入射角为88.76
°
,观测角为1.05
°
,测量区域一般在仪器前方6米处。
3.入射角:车载标线测量仪光源光线与地面之间夹角的补角,分为纵向入射角β1和横向入射角β2。
4.观测角:车载标线测量仪照明光源轴线和接收器轴线之间的夹角,设计值α一般为1.05
°
。
5.道路交通标线的快速检测是道路检测技术发展进程中一个“里程碑式”的标志,在全球范围内展开了一系列研究工作。
6.2010年佛罗里达州交通部c holzschuher等人为了在交通速度下使用车载标线测量仪连续可靠地评估道路交通标线,随机选取了六个路段用于评价车载标线测量仪在路面标记后向反射率重复性方面的精度。2014年克罗地亚萨格勒布交通运输科学学院darko babic 等人介绍了测试道路交通标线逆反射(夜间能见度)的动态方法。它使用安装在车辆测量上的车载标线测量仪进行测量,因此可以在驾驶车辆时连续测量夜间能见度道路交通标线。
7.roadvista已经成功研制了型号为laserlux g7的车载标线测量仪,每秒能够记录400 次测量结果以确保道路数据的连续性;delta开发了型号为ltl
‑
m的车载标线测量仪,标称精度达到
±
5%,重复性优于3%;retrotek也推出了型号为retrotek
‑
m的车载标线测量仪,用于测量道路交通标线的光度性能。
8.然而,由于道路的不平整度和车路振动等因素,使得车载标线测量仪的入射角无法一直保持在规定的88.76
°
,测量结果准确性有待提高。
9.现有车载标线测量仪为了解决入射角准确性的问题,在静止状态下,常使用前后2个激光点测量车载标线测量仪两端距离地面的距离,以手动或自动电机调节车载标线测量仪高度差,实现入射角调节。
10.(1)需要在静止状态下调整,无法在行车状态下调整。
11.(2)仅保证了车载标线测量仪底部地面和光源入射角呈现88.76
°
,但由于实际测量的区域在仪器前方6米处,故无法保证车载标线测量仪出射的光线和前方 6米处的地面形成的夹角为88.76
°
的补角。
12.车载标线测量仪是安装在1辆检测车上进行现场测试的。
13.因为车载标线测量仪测量的道路交通标线的逆反射性能并不是各向同性的,因此对同一个道路交通标线来说入射角和观测角改变时其逆反射性能也会发生显著变化。
14.用我们实际测量的数据为例,当用最大间隙h表示道路平整度,且车载标线测量仪
所在位置到测量区域的最大间隙为15mm,则入射角偏差至少为
±
0.13
°
,那么测量道路交通标线的逆反射性能的偏差可达到52.04mcd/m2/lx,而道路交通标线的逆反射性能一般也就100mcd/m2/lx到200mcd/m2/lx。
15.然而目前交通行业要求评价道路交通标线在入射角为1.24
°
观测角为1.05
°
的逆反射性能,所以实时调整车载标线测量仪的入射角和观测角很重要,会直接影响测量结果的准确性。
16.使用振镜控制角度,解决了动态测量过程中角度变化无法匹配测量速度的难题,即车速比较快时(100km/h等),角度调整太慢了,则完成角度调整后车载标线测量仪的测量区域已经变化很多了,角度就需要再次调整。
17.使用多维位姿监测器测量车载标线测量仪的测量区域处的道路倾斜状态,使得车载标线测量仪的角度调整是符合测量区域的倾斜状态的,这个在测量区域处的道路倾斜状态识别和角度调整的整体匹配上很难实现,匹配不佳的时候,完成角度调整后车载标线测量仪的测量区域已经变化很多了,角度就需要再次调整。
18.该方法能使得测量结果的误差减小25%至80%。
技术实现要素:
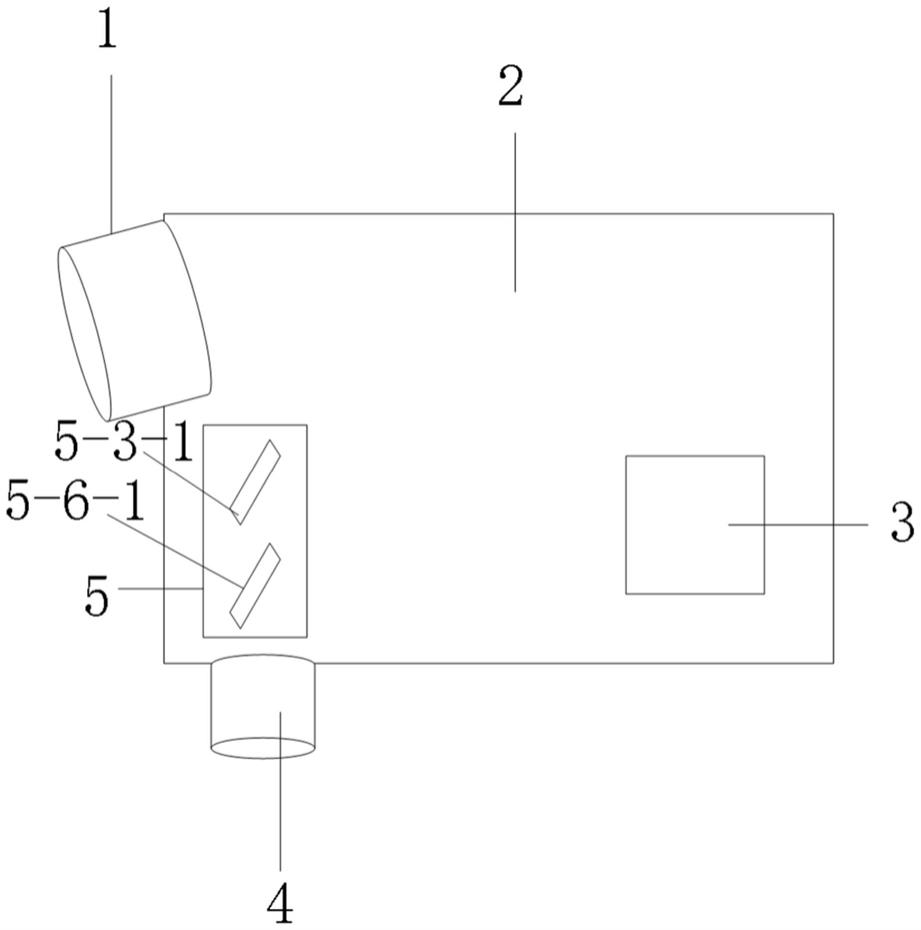
19.本专利主要由多维位姿监测器、加载壳体、高速计算模块、垂直位姿遥测器、高速双角度调节器等部分组成,硬件连接图如图1所示。
20.其中高速双角度调节器为振镜系统,调节速度不低于40千赫兹,由2个振镜组成,上部振镜为观测角调节振镜,下部振镜为入射角调节振镜,以不低于40千赫兹的频率调整从车载标线测量仪出射的光束角度(入射角)和进入车载标线测量仪的光束角度(观测角),角度定位精度优于0.01
°
。
21.观测角调节振镜出光孔在观测角调节振镜观察镜片的下端,入射角调节振镜进光孔在入射角调节振镜观察镜片的下端。观测角调节振镜第一镜片和观测角调节振镜第二镜片在观测角调节振镜观察镜片右侧,入射角调节振镜第一镜片和入射角调节振镜第二镜片在入射角调节振镜观察镜片右侧。
22.观测角调节振镜第一镜片和观测角调节振镜第二镜片初始位置为平行关系,入射角调节振镜第一镜片和入射角调节振镜第二镜片初始位置为平行关系。当处于初始位置时,照明光束和外部入射光束的方向不发生改变。观测角调节振镜第一镜片在观测角调节振镜第二镜片的左上方,入射角调节振镜第一镜片在入射角调节振镜第二镜片的左上方。
23.当进行角度调节时,观测角调节振镜第一镜片和观测角调节振镜第二镜片的夹角的2倍即为外部入射光束角度调节值pg,入射角调节振镜第一镜片和入射角调节振镜第二镜片的夹角的2倍即为照明光束角度调节值pr。照明光束角度调节值pr为入射角调节值,照明光束角度调节值pr减去外部入射光束角度调节值pg为观测角调节值。
24.当加载壳体使得装置外挂在现有的车载标线测量仪上时,可以调整高速双角度调节器中入射角调节振镜和观测角调节振镜的位置,使得入射角调节振镜对准车载标线测量仪的照明镜头,观测角调节振镜对准车载标线测量仪的接收镜头。
25.具体的实现细节是:照明光束从车载标线测量仪的照明镜头穿过接收镜头连接光阑,控制观测角调节振镜第二电机使得观测角调节振镜第二镜片发生偏转,使得照明光束
射入到观测角调节振镜第二镜片上,控制观测角调节振镜第一电机使得观测角调节振镜第一镜片发生偏转,使得从观测角调节振镜第二镜片上反射出的照明光束可以射入到观测角调节振镜第一镜片上,被反射穿过观测角调节振镜观察镜片上的观测角调节振镜出光孔。外部入射光束通过入射角调节振镜观察镜片上的入射角调节振镜进光孔,控制入射角调节振镜第一电机使得光束入射到入射角调节振镜第一镜片后被反射到入射角调节振镜第二镜片上,控制入射角调节振镜第二电机使得入射角调节振镜第二镜片将光束反射到照明镜头连接光阑。
26.多维位姿遥测器可以是多维激光测距矩阵,多维位姿遥测器与车载标线测量仪纵向水平平面的倾斜角为θ(90
°
<θ<180
°
),多维位姿遥测器与车载标线测量仪横向水平平面的倾斜角为0
°
,测量矩阵点数不小于2
×
2,激光为红外激光,功率不低于1mw,光斑不大于5mm,激光投射在前方5米至7米范围地面上,形成一个形状和车载标线测量仪测量区域相近的矩形。垂直位姿遥测器可以是面激光模组,也可以是2个交叉的线激光模组,也可以是呈十字分布的四摄像头模组,且其中一个轴线和车载标线测量仪测量方向在一个平面上,另一个轴线和车载标线测量仪测量方向所在平面垂直。高速计算模块可以选用单板机、计算机等,内嵌有加速度传感器,可通过加速度传感器感知自身运动速度和方向等状态,并可同步控制多维位姿遥测器、垂直位姿遥测器和高速双角度调节器,高速计算模块的计算速度不低于每秒50亿次浮点运算。
27.几个组成部分之间是联动的关系。高速计算模块内置的加速度传感器感知自身运动速度和方向等状态,当加速度传感器数据为动态序列时,自动启动垂直位姿遥测器和多维位姿监测器。垂直位姿遥测器测得垂直位姿发生变化时多维位姿监测器会自动工作。若垂直位姿没发生变化,需要手动启动多维位姿监测器,即使得高速计算模块判断加速度传感器数据有误,此时车载标线测量仪尚未启动。通过2个反馈环路保证装置测量的有效可靠。
附图说明
28.图1硬件连接示意图
29.图1中,1为多维位姿遥测器,2为加载壳体,3为高速计算模块,4为垂直位姿遥测器, 5为高速双角度调节器,5
‑3‑
1为观测角调节振镜观察镜片,5
‑6‑
1为入射角调节振镜观察镜片。
30.图2高速双角度调节器
31.gc为接收镜头连接光阑,rs为照明镜头连接光阑。5
‑1‑
1为观测角调节振镜第一电机, 5
‑1‑
2为观测角调节振镜第一镜片,5
‑2‑
1为观测角调节振镜第二镜片,5
‑2‑
2为观测角调节振镜第二电机,5
‑3‑
1为观测角调节振镜观察镜片,5
‑3‑
2为观测角调节振镜出光孔,5
‑4‑
1 为入射角调节振镜第一电机,5
‑4‑
2为入射角调节振镜第一镜片,5
‑5‑
1为入射角调节振镜第二镜片,5
‑5‑
2为入射角调节振镜第二电机,5
‑6‑
1为入射角调节振镜观察镜片,5
‑6‑
2为入射角调节振镜进光孔。
32.图3技术方案流程图
具体实施方式
33.本专利由多维位姿监测器、加载壳体、高速计算模块、垂直位姿遥测器、高速双角度调节器等部分组成。
34.总体技术方案实现过程如下:
35.(1)将本专利所述装置挂载在车载标线测量仪上。
36.(2)启动车载标线测量仪,按照车载标线测量仪厂家的要求进行初始化,初始化观测角,初始化入射角,初始化横向摆动角,初始化路面测量阈值,初始化道路交通标线逆反射性能的测量系数值,初始化道路交通标线的测量类型和数量,初始化定位信息。调节车载标线测量仪的观测角、入射角,进行自标定。
37.(3)启动装置,进行初始化,使得多维位姿监测器和垂直位姿遥测器数据清零,高速双角度调节器保持初始位置使得不影响车载标线测量仪的光线出射和入射。
38.(4)垂直位姿遥测器工作。在车载标线测量仪测量方向测得1个高程序列ch。计算高程序列ch中前后位置的高程差p0和左右位置的高程差q0,得到车载标线测量仪的纵向倾角初始值a0=arctan(p0/w),横向倾角初始值b0=arctan(q0/w),其中w为垂直位姿遥测器中两个测点之间的水平距离。将高程差之和(p0+q0)除以4得到理论垂直高度初始值lch0。
39.(5)垂直位姿遥测器测得垂直位姿发生变化时多维位姿监测器自动工作。若垂直位姿没发生变化,需要手动启动多维位姿监测器。
40.(6)多维位姿监测器工作。往高速计算模块里输入对应车载标线测量仪的测量距离和测量范围,高速计算模块控制多维位姿监测器的激光投射在前方地面上形成以车载标线测量仪测量距离为中心线、测量范围为边长的矩形,激光点数可为2
×
2,得到一个前置位置的道路表面高程矩阵fh。将道路表面高程矩阵fh中纵向分布的高程数据进行计算,得到高程差z0,得到纵向初始倾角βs10=arctan(k/z0),其中k为计算高程差z0用到的不同测点间的水平距离。将道路表面高程矩阵fh中横向分布的高程数据进行计算,得到高程差h,得到横向初始倾角βs20=arctan(j/h0),其中j为计算高程差h0用到的不同测点间的水平距离。
41.(7)计算得到纵向初始倾角差dβ10=βs10
‑
a0,横向初始倾角差dβ20=βs20
‑
b0。
42.(8)启动车载标线测量仪,进行动态测量,装置根据内置的加速度传感器动态序列判断车载标线测量仪处于动态测量状态,自动进入工作状态。
43.(9)垂直位姿遥测器工作。在车载标线测量仪测量方向测得1个高程序列chi。计算高程序列chi中前后位置的高程差pi和左右位置的高程差qi,得到车载标线测量仪的纵向倾角动态值ai=arctan(pi/w),横向倾角动态值bi=arctan(qi/w)。将高程差之和(pi+qi) 除以4得到垂直高度动态值lchi。
44.(10)垂直位姿遥测器测得垂直位姿发生变化时多维位姿监测器也同时自动工作。多维位姿监测器工作,测得道路表面实时高程矩阵fhi。将道路表面高程矩阵fhi中纵向分布的高程数据进行计算,得到实时高程差zi,得到纵向实时倾角βs1i=arctan(k/zi)。将道路表面高程矩阵fhi中横向分布的高程数据进行计算,得到高程差hi,得到横向实时倾角βs2i=arctan(j/hi)。
45.(11)若垂直位姿没发生变化,高速计算模块判断加速度传感器数据有误,此时车载标线测量仪尚未启动,则多维位姿监测器不启动,装置等待车载标线测量仪启动,此时通
过加速度传感器动态序列和垂直位姿遥测器测得垂直位姿是否发生变化来判断车载标线测量仪是否启动。
46.(12)计算得到纵向实时倾角差dβ1i=βs1i
‑
ai,横向实时倾角差dβ2i=βs2i
‑
bi。
47.(13)计算得到纵向实时倾角修正值x1=dβ1i
‑
dβ10,横向实时倾角修正值x2=dβ2i
‑
dβ20。
48.(14)高速计算模块将x1和x2数据进行处理,控制高速双角度调节器中的观测角调节振镜在纵向和横向上产生角度偏差x1和x2,控制入射角调节振镜在纵向和横向上产生角度偏差x1和x2,调整从车载标线测量仪出射的光束角度(入射角)和进入车载标线测量仪的光束角度(观测角),使得出射的光束与测量区域平面形成的夹角为1.24
°
,出射的光束与进入车载标线测量仪的光束夹角为1.05
°
。
49.(15)若车载标线测量仪继续测量,则重复步骤(8)~(12)。
50.(16)若车载标线测量仪停止测量,则装置停止工作。
51.本专利可用于roadvista laserlux g7等车载标线测量仪。
52.(1)将本专利所述装置挂载在车载标线测量仪上。
53.(2)启动车载标线测量仪,按照车载标线测量仪厂家的要求进行初始化,调节车载标线测量仪的观测角、入射角,进行自标定。
54.(3)启动装置,进行初始化,使得多维位姿监测器和垂直位姿遥测器数据清零,高速双角度调节器保持初始位置使得不影响车载标线测量仪的光线出射和入射。
55.(4)垂直位姿遥测器工作。在车载标线测量仪测量方向测得1个高程序列ch。计算高程序列ch中前后位置的高程差p0和左右位置的高程差q0,得到车载标线测量仪的纵向倾角初始值a0=arctan(p0/w),横向倾角初始值b0=arctan(q0/w),其中w为垂直位姿遥测器中两个测点之间的水平距离。将高程差之和(p0+q0)除以4得到理论垂直高度初始值lch0。
56.(5)垂直位姿遥测器测得垂直位姿发生变化时多维位姿监测器自动工作。若垂直位姿没发生变化,需要手动启动多维位姿监测器。
57.(6)多维位姿监测器工作。往高速计算模块里输入对应车载标线测量仪的测量距离和测量范围,高速计算模块控制多维位姿监测器的激光投射在前方地面上形成以车载标线测量仪测量距离为中心线、测量范围为边长的矩形,激光点数可为2
×
2,得到一个前置位置的道路表面高程矩阵fh。将道路表面高程矩阵fh中纵向分布的高程数据进行计算,得到高程差z0,得到纵向初始倾角βs10=arctan(k/z0),其中k为计算高程差z0用到的不同测点间的水平距离。将道路表面高程矩阵fh中横向分布的高程数据进行计算,得到高程差h,得到横向初始倾角βs20=arctan(j/h0),其中j为计算高程差h0用到的不同测点间的水平距离。
58.(7)计算得到纵向初始倾角差dβ10=βs10
‑
a0,横向初始倾角差dβ20=βs20
‑
b0。
59.(8)启动车载标线测量仪,进行动态测量,装置根据内置的加速度传感器动态序列判断车载标线测量仪处于动态测量状态,自动进入工作状态。
60.(9)垂直位姿遥测器工作。在车载标线测量仪测量方向测得1个高程序列chi。计算高程序列chi中前后位置的高程差pi和左右位置的高程差qi,得到车载标线测量仪的纵向倾角动态值ai=arctan(pi/w),横向倾角动态值bi=arctan(qi/w)。将高程差之和(pi+qi) 除以4得到垂直高度动态值lchi。
61.(10)垂直位姿遥测器测得垂直位姿发生变化时多维位姿监测器也同时自动工作。多维位姿监测器工作,测得道路表面实时高程矩阵fhi。将道路表面高程矩阵fhi中纵向分布的高程数据进行计算,得到实时高程差zi,得到纵向实时倾角βs1i=arctan(k/zi)。将道路表面高程矩阵fhi中横向分布的高程数据进行计算,得到高程差hi,得到横向实时倾角βs2i=arctan(j/hi)。
62.(11)若垂直位姿没发生变化,高速计算模块判断加速度传感器数据有误,此时车载标线测量仪尚未启动,则多维位姿监测器不启动,装置等待车载标线测量仪启动,此时通过加速度传感器动态序列和垂直位姿遥测器测得垂直位姿是否发生变化来判断车载标线测量仪是否启动。
63.(12)计算得到纵向实时倾角差dβ1i=βs1i
‑
ai,横向实时倾角差dβ2i=βs2i
‑
bi。
64.(13)计算得到纵向实时倾角修正值x1=dβ1i
‑
dβ10,横向实时倾角修正值x2=dβ 2i
‑
dβ20。
65.(14)高速计算模块将x1和x2数据进行处理,控制高速双角度调节器中的观测角调节振镜在纵向和横向上产生角度偏差x1和x2,控制入射角调节振镜在纵向和横向上产生角度偏差x1和x2,调整从车载标线测量仪出射的光束角度(入射角)和进入车载标线测量仪的光束角度(观测角),使得出射的光束与测量区域平面形成的夹角为1.24
°
,出射的光束与进入车载标线测量仪的光束夹角为1.05
°
。
66.(15)若车载标线测量仪继续测量,则重复步骤(8)~(12)。
67.(16)若车载标线测量仪停止测量,则装置停止工作。
68.本专利实现了车载标线测量仪动态测量过程中入射角保持在88.76
°
,观测角保持在 1.05
°
。即车载标线测量仪发出光束与被测区域地面水平面的夹角为88.76
°
。
69.本专利具有极好的适用性,属于外挂式装备,角度调节过程不影响车载标线测量仪本身工作。
70.本专利利用了多维位姿监测器和垂直位姿遥测器监测车载标线测量仪动态测量过程中的入射角变化,并使用高速双角度调节器进行快速角度调整。
71.本专利的角度调整速度能够满足测量需要。因为高速双角度调节器中观测角调节振镜和入射角调节振镜的调节频率不低于40千赫兹,故每次装置测得车载标线测量仪入射角存在偏差后,可以在1/40000秒内完成角度调整,以车载标线测量仪最快工作时速100千米 /小时计算,即在车载标线测量仪移动0.7毫米内即可完成角度调整。若多维位姿监测器和垂直位姿遥测器的测量和响应速度取较差情况,则每组位姿测量和角度调整所需时间为 20毫秒,在车载标线测量仪移动0.56米内即可完成角度调整。国内一般标线的最小长度为3米,则角度调整时车载标线测量仪仅移动了最短标线的1/6部分,不影响最终测量结果的计算。
72.本专利中几个组成部分之间是联动的关系。高速计算模块内置的加速度传感器感知自身运动速度和方向等状态,当加速度传感器数据为动态序列时,自动启动垂直位姿遥测器和多维位姿监测器。垂直位姿遥测器测得垂直位姿发生变化时多维位姿监测器会自动工作。若垂直位姿没发生变化,需要手动启动多维位姿监测器,即使得高速计算模块判断加速度传感器数据有误,此时车载标线测量仪尚未启动。通过2个反馈环路保证装置测量的有效可靠。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1