一种智能采血系统机械臂的制作方法
1.本实用新型涉及采血设备技术领域,具体涉及一种智能采血系统机械臂。
背景技术:
2.在医疗领域中,常常需要对患者进行采血化验,以对病症进行确诊,在进行采血时,需要把采集后血液放入采血试管内,后续再把采血试管内的血液拿到化验室进行化验。现有医院使用采血试管时,一般随意放置在收纳盒内,手动流转操作等,没有一种自动化流转保存设备。实际使用中,现有的采血方式,一般是采集多个病人血样后再一起送入化验室,因此,先采集转运途中采血试管和采血试管之间容易产生碰撞而导致采血试管的损坏,从而导致后续实验室检测出的数据不能真实反映患者情况。
技术实现要素:
3.本实用新型为了克服以上技术的不足,提供了一种方便采血试管的摆放,减少人工操作的智能采血系统机械臂。
4.本实用新型克服其技术问题所采用的技术方案是:
5.一种智能采血系统机械臂,包括:沿左右方向水平设置于底座上的直线导轨ⅰ、安装于直线导轨ⅰ上的导轨滑块上的滑座ⅰ、沿前后方向水平安装于滑座ⅰ的横梁、沿前后方向水平安装于横梁上的直线导轨ⅱ、滑动安装于直线导轨ⅱ上的滑座ⅱ、沿竖直方向安装于滑座ⅱ上的纵梁、沿竖直方向安装于纵梁上的直线导轨ⅲ以及滑动安装于直线导轨ⅲ上的滑座ⅲ,电动夹爪安装于滑座ⅲ上,x轴驱动机构驱动滑座ⅰ沿直线导轨ⅰ左右移动,y轴驱动机构驱动滑座ⅱ沿直线导轨ⅱ前后移动,z轴驱动机构驱动滑座ⅲ沿直线导轨ⅲ上下移动。
6.进一步的,上述x轴驱动机构包括安装于底座上的伺服电机ⅰ、分别转动安装于底座左右两端的同步带轮ⅱ以及台同步带ⅱ,其中一同步带轮ⅱ与伺服电机ⅰ的输出轴传动连接,同步带ⅱ的两端分别包绕过同侧对应的同步带轮ⅱ后固定于滑座ⅰ上。
7.进一步的,上述y轴驱动机构包括安装于横梁上的伺服电机ⅲ、分别转动安装于横梁前后两端的同步带轮ⅲ以及台同步带ⅲ,其中一同步带轮ⅲ与伺服电机ⅲ的输出轴传动连接,同步带ⅲ的两端分别包绕过同侧对应的同步带轮ⅲ后固定于滑座ⅱ上。
8.进一步的,上述z轴驱动机构包括安装于纵梁上的伺服电机ⅱ、分别转动安装于纵梁上下两端的同步带轮ⅰ以及台同步带ⅰ,其中一同步带轮ⅰ与伺服电机ⅱ的输出轴传动连接,同步带ⅰ的两端分别包绕过同侧对应的同步带轮ⅰ后固定于滑座ⅲ上。
9.本实用新型的有益效果是:三轴驱动机构驱动电动夹爪沿x轴、y轴、z轴的三轴方向移动,电动夹爪可以移动至试管处后电动夹爪将试管抓取,之后三轴驱动机构驱动电动夹爪带动试管移动至所需存放位置进行摆放,之后电动夹爪松开对试管的夹持,完成试管的转运,整个过程不需人工操作,提高了效率,防止采血试管之间发生直接接触导致损坏,同时降低了试管流传过程中的风险。
附图说明
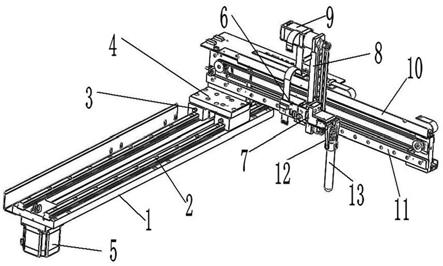
10.图1为本实用新型的x轴y轴z轴机构的立体结构示意图;
11.图2为本实用新型的横梁部位的立体结构示意图ⅰ;
12.图3为本实用新型的伺服电机ⅰ部位的立体结构示意图;
13.图4为本实用新型的横梁部位的立体结构示意图ⅱ;
14.图5为本实用新型的纵梁部位的立体结构示意图;
15.图中,1.底座 2.直线导轨
ⅰꢀ
3.导轨滑块 4.滑座
ⅰꢀ
5.伺服电机
ⅰꢀ
6.滑座
ⅱꢀ
7.滑座
ⅲꢀ
8.纵梁 9.伺服电机
ⅱꢀ
10.横梁 11.直线导轨
ⅱꢀ
12.电动夹爪 13.试管 14.伺服电机
ⅲꢀ
15. 同步带轮
ⅰꢀ
16.同步带
ⅰꢀ
17.同步带
ⅱꢀ
18.同步带轮
ⅱꢀ
19.直线导轨
ⅲꢀ
20.同步带轮
ⅲꢀ
21.同步带ⅲ。
具体实施方式
16.下面结合附图1至附图5对本实用新型做进一步说明。
17.一种智能采血系统机械臂,包括:沿左右方向水平设置于底座1上的直线导轨
ⅰꢀ
2、安装于直线导轨
ⅰꢀ
2上的导轨滑块3上的滑座
ⅰꢀ
4、沿前后方向水平安装于滑座
ⅰꢀ
4的横梁10、沿前后方向水平安装于横梁10上的直线导轨
ⅱꢀ
11、滑动安装于直线导轨
ⅱꢀ
11上的滑座
ⅱꢀ
6、沿竖直方向安装于滑座
ⅱꢀ
6上的纵梁8、沿竖直方向安装于纵梁8上的直线导轨
ⅲꢀ
19以及滑动安装于直线导轨
ⅲꢀ
19上的滑座
ⅲꢀ
7,电动夹爪12安装于滑座
ⅲꢀ
7上,x轴驱动机构驱动滑座
ⅰꢀ
4沿直线导轨
ⅰꢀ
2左右移动,y轴驱动机构驱动滑座
ⅱꢀ
6沿直线导轨
ⅱꢀ
11前后移动,z轴驱动机构驱动滑座
ⅲꢀ
7沿直线导轨
ⅲꢀ
19上下移动。三轴驱动机构驱动电动夹爪16沿x轴、y轴、z轴的三轴方向移动,电动夹爪16可以移动至试管13处后电动夹爪16将试管17抓取,之后三轴驱动机构驱动电动夹爪16带动试管17移动至所需存放位置进行摆放,之后电动夹爪16松开对试管17的夹持,完成试管13的转运,整个过程不需人工操作,提高了效率,防止采血试管之间发生直接接触导致损坏,同时降低了试管流传过程中的风险。
18.x轴驱动机构可以为如下结构,其包括安装于底座1上的伺服电机
ⅰꢀ
5、分别转动安装于底座1左右两端的同步带轮
ⅱꢀ
18以及台同步带
ⅱꢀ
17,其中一同步带轮
ⅱꢀ
17与伺服电机
ⅰꢀ
5的输出轴传动连接,同步带
ⅱꢀ
17的两端分别包绕过同侧对应的同步带轮
ⅱꢀ
18后固定于滑座
ⅰꢀ
4上。伺服电机
ⅰꢀ
5驱动一同步带轮
ⅱꢀ
18转动,由于两个同步带轮
ⅱꢀ
18通过同步带
ⅱꢀ
17传动连接,同步带
ⅱꢀ
17的两端分别与滑座
ⅰꢀ
4固定,因此通过伺服电机
ⅰꢀ
5正向或反向转动实现驱动滑座
ⅰꢀ
4沿直线导轨
ⅰꢀ
2左右移动。
19.y轴驱动机构可以为如下结构,其包括安装于横梁10上的伺服电机
ⅲꢀ
14、分别转动安装于横梁10前后两端的同步带轮
ⅲꢀ
20以及台同步带
ⅲꢀ
21,其中一同步带轮
ⅲꢀ
20与伺服电机
ⅲꢀ
14的输出轴传动连接,同步带
ⅲꢀ
21的两端分别包绕过同侧对应的同步带轮
ⅲꢀ
20后固定于滑座
ⅱꢀ
6上。伺服电机
ⅲꢀ
14驱动一同步带轮
ⅲꢀ
20转动,由于两个同步带轮
ⅲꢀ
20通过同步带
ⅲꢀ
21传动连接,同步带
ⅲꢀ
21的两端分别与滑座
ⅱꢀ
6固定,因此通过伺服电机
ⅲꢀ
14正向或反向转动实现驱动滑座
ⅱꢀ
6沿直线导轨
ⅱꢀ
11前后移动。
20.z轴驱动机构可以为如下结构,其包括安装于纵梁8上的伺服电机
ⅱꢀ
9、分别转动安装于纵梁8上下两端的同步带轮
ⅰꢀ
15以及台同步带
ⅰꢀ
16,其中一同步带轮
ⅰꢀ
15与伺服电机
ⅱꢀ
9的输出轴传动连接,同步带
ⅰꢀ
16的两端分别包绕过同侧对应的同步带轮
ⅰꢀ
15后固定
于滑座
ⅲꢀ
7上。伺服电机
ⅱꢀ
9驱动一同步带轮
ⅰꢀ
15转动,由于两个同步带轮
ⅰꢀ
15通过同步带
ⅰꢀ
16传动连接,同步带
ⅰꢀ
16的两端分别与滑座
ⅲꢀ
7固定,因此通过伺服电机
ⅱꢀ
9正向或反向转动实现驱动滑座
ⅲꢀ
7沿直线导轨
ⅲꢀ
19上下移动。
21.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1