分辨率可配置的激光雷达的制作方法
1.本发明涉及激光传感器领域,尤其涉及一种分辨率可配置的激光雷达。
背景技术:
2.激光雷达是机器视觉中一种主要探测手段,其通过向目标发射激光,探测目标表面漫反射返回的光计算目标距离,再通过单点激光的扫描或阵列排布扩展到二维,得到目标三维信息。
3.激光雷达作为感知的重要传感器,视场和分辨率是其重要参数,现有技术的激光雷达在视场范围内通常采用均匀分辨率进行扫描,在实际应用中,不同视场方向对分辨率的要求可能不同。提高分辨率,满足部分视场要求,会造成其余部分资源过剩;降低分辨率,降低资源但会造成分辨率不足,无法识别被测物。
4.此外,激光雷达需要满足体积小、可靠性高、高成像帧频、高分辨率、远测距等性能,更需要将有限的资源合理分配,提高产品适应性、合理性仍是目前亟需改进的方面。
技术实现要素:
5.为解决上述问题,本发明公开了一种分辨率可配置的激光雷达,包括:主控模块、发射模块、至少一个接收模块以及扫描模块,
6.所述主控模块包括第一时序控制单元和至少一个第二时序控制单元,所述发射模块包括第一光源和至少一个第二光源,所述第一时序控制单元用于控制所述第一光源发射激光脉冲,每个所述第二时序控制单元用于控制一个所述第二光源发射激光脉冲。
7.在其中一个实施例中,所述第一时序控制单元由主控模块控制输出预设时序,所述第二时序控制单元由主控模块实时控制输出时序。
8.在其中一个实施例中,所述发射模块还包括转折镜、至少一个分光镜、第一聚焦透镜及至少一个第二聚焦透镜;
9.所述第一光源、第一聚焦透镜、转折镜构成第一发射光路,每个所述第二光源、第二聚焦透镜、分光镜构成第二发射光路;
10.所述第一聚焦透镜用于对第一光源发出的激光进行准直得到第一准直激光,所述第二聚焦透镜用于对第二光源发出的激光进行准直得到第二准直激光;
11.所述分光镜和所述转折镜用于将所述第一准直激光和第二准直激光调整至同轴,并经所述扫描模块反射至待测目标。
12.在其中一个实施例中,所述扫描模块按照第一预设频率沿水平及垂直方向二维扫描。
13.在其中一个实施例中,所述接收模块包括第一接收镜组、第一探测器和第二分光镜,经过待测目标反射的激光返回至所述扫描模块,再经过所述第二分光镜和第一接收镜组聚焦至所述第一探测器。
14.在其中一个实施例中,所述发射模块还包括第三聚焦透镜及至少一个第四聚焦透
镜;
15.所述第一光源、第三聚焦透镜构成第三发射光路,每个所述第二光源、第四聚焦透镜构成第四发射光路;
16.所述第三聚焦透镜用于对第一光源发出的激光进行准直得到第三准直激光,所述第四聚焦透镜用于对第二光源发出的激光进行准直得到第四准直激光;
17.所述第三准直激光和所述第四准直激光经过所述扫描模块反射至待测目标。
18.在其中一个实施例中,所述发射模块、接收模块、扫描模块、主控模块均沿水平方向进行旋转,还包括,所述扫描模块按照第二预设频率沿垂直方向一维摆动。
19.在其中一个实施例中,所述接收模块包括第二接收镜组和第二探测器,经过待测目标反射的激光返回至所述第二接收镜组,并聚焦至所述第二探测器。
20.本发明的优点和有益效果为:
21.1、本发明提供的一种分辨率可配置的激光雷达,可有效提高系统硬件利用率,降低系统消耗,提高性价比。
22.2、本发明提供的一种分辨率可配置的激光雷达,充分提高每一帧图像的应用价值,降低算法压力,提高系统效率。
23.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
24.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
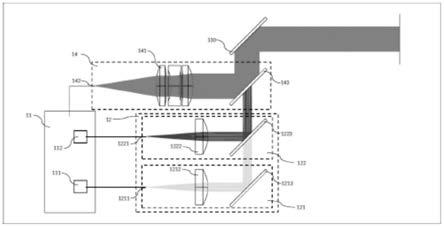
25.图1是本实用新型实施例提供的激光雷达一种结构示意图;
26.图2是本实用新型实施例提供的激光雷达分辨率分布的一种情况示意图;
27.图3是本实用新型实施例提供的激光雷达分辨率分布的另一种情况示意图;
28.图4是本实用新型实施例提供的激光雷达另一种结构示意图;
29.图5是本实用新型实施例提供的激光雷达分辨率分布的一种情况示意图。
具体实施方式
30.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
31.本发明公开了一种分辨率可配置的激光雷达,图1是本实用新型实施例提供的激光雷达一种光路结构示意图;所述的激光雷达主要包括四个部分,分别为:主控模块11、发射模块12、扫描模块13、接收模块14。
32.其中,主控模块11包括第一时序控制单元111和至少一个第二时序控制单元112;
33.发射模块12包括第一光源1211和至少一个第二光源1221,所述发射模块12还包括第一聚焦透镜1212、至少一个第二聚焦透镜1222、转折镜 1213以及至少一个分光镜1223;所述第一光源1211和第一聚焦镜1212以及转折镜1213组成第一发射光路121;每个所述第二光源1221、第二聚焦镜1222、分光镜1223构成第二发射光路122。
34.所述接收模块11包括第一接收镜组141、第一探测器142和第二分光镜143。
35.所述激光雷达采用同轴光学系统,所述主控模块11中的第一时序控制控制单元
111控制第一光源1211发射激光脉冲,经过第一聚焦透镜1212得到第一准直激光;每个所述第二时序控制单元112控制第二光源1221发射激光脉冲,经过第二聚焦透镜1222得到第二准直激光;所述第一准直激光经过所述转折镜1213与所述第二准直激光经过所述分光镜1223调至同轴,并经过所述扫描模块13反射至待测目标表面。
36.激光经过待测目标漫反射返回至所述扫描模块13,再经过所述第二分光镜143和第一接收镜组141聚焦至第一探测器142,通过飞行时间实现探测目标距离。
37.更为具体的,所述扫描模块13按照第一预设频率沿水平及垂直方向二维扫描。
38.更为具体的,所述第一时序控制单元111由所述主控模块11控制输
39.出预设时序,所述第二时序控制单元112由所述主控模块11实时控制输出时序。
40.更为具体的,所述主控模块11输出的预设时序周期等于所述扫描模块 13一次摆动周期。
41.作为优选的,图2、图3是本实用新型图1实施例提供的激光雷达分辨率分布的一种情况示意图。图中
○
为固定分辨率部分,
×
为可配置分辨率部分。
42.更为具体的,车辆在正常行驶过程中,对分辨率无特殊要求,此时所述第一时序控制单元111由所述主控模块11控制输出预设时序,控制第一光源1211以预设分辨率发射激光脉冲,以固定分辨率
○
扫描前方目标;
43.更为具体的,车辆在高速行驶过程中,车辆对正前方探测分辨率及精度要求提高,所述第二时序控制单元112由所述主控模块11实时控制输出时序,控制第二光源1221在图2中
×
部分发射激光脉冲,同时所述第一时序控制单元111依然由所述主控模块11控制输出预设时序,形成图2式的分辨率分布图;
44.更为具体的,在车辆转弯过程中,车辆对转向方向(如右侧)探测分辨率及精度要求提高,所述第二时序控制单元112由所述主控模块11实时控制输出时序,控制第二光源1221在图3中
×
部分发射激光脉冲,同时所述第一时序控制单元111依然由所述主控模块11控制输出预设时序,形成图 3式的分辨率分布图;
45.更为具体的,所述第二时序控制单元112由所述主控模块11实时控制输出时序,控制第二光源1221在任意时刻发射激光脉冲,该时序可根据需求在扫描模块130的一个摆动周期内任意配置,在第一光源1211固定扫描点中插入新的扫描点,实现分辨率任意配置。
46.图4是本实用新型实施例提供的激光雷达另一种光路结构示意图;所述的激光雷达主要包括四个部分,包括主控模块11、发射模块12、扫描模块 13、接收模块14。所述主控模块11包括第一时序控制单元111和至少一个第二时序控制单元112;
47.所述发射模块12包括第一光源1211和至少一个第二光源1221,所述发射模块12还包括第三聚焦透镜1214、至少一个第四聚焦透镜1224;
48.所述第一光源1211和第三聚焦镜1214组成第三发射光路123;每个所述第二光源1221、第四聚焦镜1224组成第四发射光路124。
49.所述接收模块11包括第二接收镜组144、第二探测器145。
50.所述激光雷达采用平行轴光学系统,所述主控模块11中的第一时序控制控制单元111控制第一光源1211发射激光脉冲,经过第三聚焦透镜1214 得到第三准直激光;每个所述第二时序控制单元112控制第二光源1221发射激光脉冲,经过第二聚焦透镜1224得到第四准直激光;所述第三准直激光与所述第四准直激光经过所述扫描模块13反射至待测目标
表面。
51.激光经过待测目标漫反射返回至所述扫描模块13,再经过所述第二接收镜组144聚焦至第二探测器145,通过飞行时间实现探测目标距离。
52.更为具体的,所述主控模块11、发射模块12、扫描模块13、接收模块 14均沿水平方向进行旋转;
53.更为具体的,所述扫描模块13按照第二预设频率沿垂直方向一维摆动;更为具体的,所述第一时序控制单元111由所述主控模块11控制输出预设时序,所述第二时序控制单元112由所述主控模块11实时控制输出时序。作为优选的,图5是实用新型图4实施例提供的激光雷达分辨率分布的一种情况示意图。图中
○
为固定分辨率部分,
×
为可配置分辨率部分。
54.更为具体的,所述第一时序控制单元111由所述主控模块11控制输出预设时序,控制第一光源1211以预设分辨率发射激光脉冲,以固定分辨率
○
沿水平方向360
°
均匀分布;
55.更为具体的,所述激光雷达在车顶或路侧沿水平倾斜向下扫描时,对沿着道路分辨率要求更高,且越远距离分辨率要求更高。如图5所示,图中扫描视场为示意图,只表示出水平方向360
°
中一部分视场。图中510为水平 180
°
视场在二维平面上的投影;520为沿道路方向水平30
°
56.视场分辨率分布;530为沿道路视场内,与水平夹角15
°
范围内视场。
57.实施例说明的情况对530视场内分辨率要求更高,将可配置分辨率
×
配置在530视场。此时所述第二时序控制单元112由所述主控模块11实时控制输出时序,控制第二光源1221在图5中
×
部分发射激光脉冲,同时所述第一时序控制单元111依然由所述主控模块11控制输出预设时序,形成图 5式的分辨率分布图。水平方向360
°
另外部分视场与所述视场510对称。
58.更为具体的,所述第二时序控制单元112由所述主控模块11实时控制输出时序,控制第二光源1221在任意时刻发射激光脉冲,该时序可根据需求在水平360
°
、垂直30
°
任意位置任意配置,在第一光源1211固定扫描点中插入新的扫描点,实现分辨率任意配置。
59.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
60.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
61.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1