位移式测距仪的制作方法
1.本实用新型涉及测距技术领域,具体涉及一种位移式测距仪。
背景技术:
2.轮式测距仪是测距仪的一种,主要为户外距离测量而设计制造的,适用于各种地面条件,包括草地、山坡、崎岖不平的施工场地等等。轮式测距仪的测量距离长,数显系统的清晰、准确,因此被广泛用于道路工程、管线铺设工程、专业测绘等施工作业的测量和评估,交通事故距离位置的测量,高尔夫球场的施工测量,及农田建设管理的测量等等,其省时方便的优势被越来越多的人所发现和利用。
3.现有技术中人们采用霍尔效应的原理做成轮式测距仪,这种轮式测距仪主要用于测量地面的上尺寸,它通过轮子在地面上转动时产生的开关变化检测脉冲个数,通过计算轮子周长和开孔个数来计算距离。
4.对于以霍尔传感器制成的轮式测距仪而言,由于轮子每转一圈,由霍尔传感器产生的脉冲个数很少,通常为几个,因此,在实际的测量过程中,霍尔效应的轮式测距仪的精度较低。
技术实现要素:
5.本实用新型提供一种用于提升检测精度的位移式测距仪。
6.解决上述技术问题的技术方案如下:
7.位移式测距仪,包括:
8.壳体;
9.滚动组件,滚动组件可转动地安装在壳体上;
10.还包括:
11.与滚动组件连接并受滚动组件驱动后发出脉冲信号的编码器,编码器与壳体固定连接;
12.控制电路,控制电路与编码器电连接,控制电路根据编码器提供的脉冲数量和脉冲的相位差计算距离。
13.本实用新型通过编码器将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小,再根据脉冲的相位差,判断滚动组件前进和后退,从而控制电路计算出脉冲数目的增加与减少。编码器旋转一圈可以产生上千个脉冲信号,因此,本实用新型相对现有技术而言,脉冲数量成指数倍增加,控制电路根据这些脉冲信号有利于准确地计算出所测距离。本实施例中的编码器采用增量式编码器,具有分辨率高、成本低的优点。
附图说明
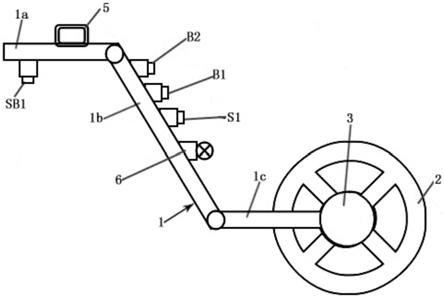
14.图1为位移式测距仪的侧视图
15.图2为控制电路的示意图;
16.附图中的标记:
17.壳体1,手持段1a,中间连接段1b,叉头连接段1c,滚动组件2,编码器3,控制电路4,显示器5,发射器6,驱动电路7,转换器8,供电电池9,充电器10,启动开关s1,行进指引开关b1,计数按钮sb1,控制器mcu,清零按钮b2,第一二极管d1,第二二极管d2。
具体实施方式
18.下面结合附图对本实用新型进行说明。
19.如图1,本实用新型的位移式测距仪,包括:壳体1、滚动组件2、编码器3、控制电路4,下面对每部分以及各部分之间的关系进行详细说明:
20.如图1,所述壳体1包括手持段1a、中间连接段1b、叉头连接段1c,中间连接段1b的一端与手持段1a连接后,在中间连接段1b与手持段1a之间形成第一夹角,叉头连接段1c与中间连接段1b的另一端连接后,在叉头连接段1c与中间连接段1b之间形成第二夹角。第一夹角和第二夹角均为钝角。
21.如图1,手持段1a与中间连接段1b优先采用固定方式连接,叉头连接段1c与中间连接段1b优先采用固定方式连接。手持段1a与叉头连接段1c优先以相互平行的方式布置,中间连接段1b与手持段1a以及叉头连接段1c既不平行也不垂直,即中间连接段1b相对手持段1a和叉头连接段1c而言是倾斜的,由此形成的第一夹角和第二夹角均为钝角。这种结构的壳体1在使用过程中不但省力,而且利用中间连接段1b可以安装控制电路4中的一些部件。
22.如图1,滚动组件2可转动地安装在壳体1上,本实施例中,滚动组件2优先采用的结构为:包括轮子以及转轴、轴承,叉头连接段1c上设有两个安装孔,每个安装孔内安装一个轴承,其中一个安装孔为盲孔,另一个安装孔为通孔,转轴与轴承配合,转轴的一端穿过轴承暴露在安装孔的外部,轮子与转轴固定连接,当轮子转动时,轮子带动转轴转动。
23.如图1,编码器3与滚动组件2连接并受滚动组件2驱动后发出脉冲信号,编码器3与壳体1固定连接,其中,转轴暴露在安装孔外部的一端与编码器3连接,当转轴转动时,转轴带动编码器3工作,编码器3输出脉冲信号。
24.如图1,控制电路4与编码器3电连接,控制电路4根据编码器3提供的脉冲数量和脉冲相位差计算距离。操控人员从测距起点开启控制电路4,操控人员推动测距仪移动,轮子旋转带动转轴旋转,转轴驱动编码器3工作输出脉冲信号,在此期间,控制电路4累计计数脉冲数量,到达终点时,操控人员使控制电路4停止计数。控制电路4根据以下公式计算距离:
25.距离公式:
26.l:测量距离;
27.sum:控制器计量的总脉冲数;
28.n:编码器旋转1圈输出的脉冲总数;
29.c:轮子周长。
30.如图1和图2,本实施例中,控制电路4包括控制器mcu、计数按钮sb1,控制器mcu根据编码器3提供的脉冲数量和脉冲的相位差计算距离,脉冲相位差的作用在于:比如前进时属于脉冲数量增加的计数,后退时属于脉冲数量减少的计数,计数按钮sb1与控制器mcu电
连接。控制器mcu可以是单片机或plc,控制器mcu优先采用单片机。计数按钮sb1接通时,使控制器mcu开启准备计数脉冲的指示,当编码器3工作输出脉冲信号时,控制器mcu接收编码器3输出的脉冲信号并进行计数。当计数按钮sb1断开时,控制器mcu停止对脉冲进行计数。计数按钮sb1安装在壳体1上,优选地,计数按钮sb1优先安装在手持段1a上,以便于操作时对计数按钮sb1的闭合或断开进行控制。
31.如图1和图2,本实施例中,编码器3优先采用输出为5v的编码器,例如增量式编码器,由于控制器mcu采用的是单片机,单片机工作时识别的信号通常为5v或3.3v,因此,当编码器3选用输出为24v的编码器时,则控制电路4还包括转换器8,转换器8与控制器mcu电连接,转换器8还与编码器3电连接,转换器8用于将编码器3输出的24v电信号转换为5v的电信号并提供给控制器mcu。转换器8优先采用光耦,即光电耦合器。
32.如图1和图2,本实施例中,控制电路4还包括用于清除控制器mcu内累计脉冲数量的清零按钮b2,清零按钮b2与控制器mcu电连接。当清零按钮b2接通时,控制器mcu内累计的脉冲数量归零,通过清零按钮便于对不同的距离进行测量,或者对相同距离进行重复测量。
33.如图1和图2,清零按钮b2安装在壳体1上,优选地,清零按钮b2优先安装在中间连接段1b上,清零按钮b2远离手持段1a,从而避免在测距过程中触碰到清零按钮b2引发误操作,杜绝造成测距失败或不准确。
34.如图1和图2,本实施例中,控制电路4还包括启动开关s1、供电电池9,启动开关s1的一端与供电电池9连接,启动开关s1的一端还与控制器mcu连接,启动开关s1闭合时,使控制电路4得电,启动开关s1断开后,控制电路4失电不能工作。控制电路4还包括充电器10、第一二极管d1、第二二极管d2,充电器10通过第一二极管d1与供电电池9连接,第二二极管d2连接于启动开关s1与供电电池9之间,第二二极管d2将供电电池9输出的电流整流后提供给控制器mcu。
35.本实用新型不限于上述结构,例如:
36.(a),如图1和图2,还包括用于显示测出距离的显示器5,显示器5与控制电路4连接,通过显示器5可以直接显示出测量的距离,以便于操作人员直观地观察到所测距离的情况。显示器5安装在壳体1上,优选地,显示器5优先安装在手持段1a上。显示器5与计数按钮sb1优先分别安装在手持段1a的不同的面上,例如,计数按钮sb1安装在手持段1a的下表面,而显示器5安装于手持段1a的上表面。
37.(b),如图1和图2,还包括发射器6、驱动电路7、行进指引开关b1,发射器6用于发出行进指引线,发射器6优先采用激光头。驱动电路7分别与控制电路4和发射器6电连接,行进指引开关b1与控制电路4电连接。发射器6发出的行进指引线为直线,以便于轮子行进时沿着直线移动,增加测距的精度。行进指引开关b1闭合时,控制电路4的控制器mcu接收到使发射器6工作的指令,控制器mcu输出指令到驱动电路7,驱动电路7将指令信号放大后输出到发射器6,从而使发射器6发射出光线。驱动电路7为信号放大器,该信号放大器可以采用三极管或mos管。
38.如图1和图2,发射器6安装在壳体1上,优选地,发射器6优先安装在中间连接段1b上,发射器6在壳体1上可以调节角度,例如,发射器6与壳体1配合的表面均为球面,发射器6地壳体1上转动后,即可进行角度调整,在壳体1上安装有锁紧螺钉,当发射器6转动时,通过锁紧螺钉将发射器6锁定。
39.(c),如图1和图2,手持段1a与中间连接段1b还可以采用铰接方式连接,叉头连接段1c与中间连接段1b优先采用铰接方式连接,利用例如折叠自行车上的折叠锁定结构来锁定呈展开或折叠状态的壳体1。
40.(d),对于测距结果的显示,还可以采用:在控制电路4包括无线通信模块,无线通信模块可以是蓝牙模块或wifi模块等,接收终端可以是移动终端,例如智能手机,通过无线通信模块与智能手机通信,将测距的数据发送到智能手机。通过这种方式用于代替直接在壳体1上安装显示器的方式。
41.本实用新型的工作过程如下:
42.如图1和图2,闭合启动开关s1,系统得电,并进入工作状态。此时可以根据需要选择是否闭合行进指引开关b1,如果使行进指引开关b1闭合,发射器6发出行进指引线,即激光,发射器6发出直线激光照射在测距物表面和/或地面上,便于轮子滚动轨迹成直线。如果需要关闭激光,则使行进指引开关b1断开即可。如果距离数据需要清零,则按下清零按钮b2。
43.如图1和图2,在测距时,按住计数按钮sb1并保持,将力施加在壳体1上,使滚动组件2中的轮子滚动,轮子带动转轴转动,转轴带动编码器3工作,从而使编码器3的a、b通道输出脉冲信号。编码器3的a、b通道输出的脉冲信号经过控制器mcu处理,从而获得到距离数据。到达终点时,释放计数按钮sb1,停止计数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1