一种PCB板线宽线距测量原点复位系统的制作方法
一种pcb板线宽线距测量原点复位系统
技术领域
1.本发明涉及线宽线距测量技术领域,更具体的,涉及一种pcb板线宽线距测量原点复位系统。
背景技术:
2.随着pcb板行业的飞速发展,生产过程对品质要求越来越严格。pcb板线宽测量设备越来越普及,目前市场上多以手动线宽测量仪为主,手动线宽测量仪需要人工移动被测pcb板,将测量点移动到成像装置的成像范围内,然后再手动定位操作测量,测量过程中没有限位预警机制,测量后手动对xyz轴进行复位,浪费人力,检测效率低下。
3.因此,现有技术存在缺陷,有待改进与发展。
技术实现要素:
4.本发明要解决的技术问题在于,针对背景技术中指出的现有技术的缺陷,提供一种pcb板线宽线距测量原点复位系统。
5.本发明的另一目的在于,提供一种设有上述pcb板线宽线距测量原点复位系统的pcb板线宽线距测量装置。
6.本发明解决技术问题所采用的技术方案如下:
7.提供一种pcb板线宽线距测量原点复位系统,其特征在于,包括:
8.xyz轴系统,其被设置为带动测量镜头运动至待测pcb板待测点上方,所述xyz轴系统包括:x轴系统、y轴系统和z轴系统;
9.光电感应系统,所述光电感应系统包括分别设置在x轴系统、y轴系统和z轴系统上的光电开关和光电开关感应片,所述x轴系统、y轴系统和z轴系统上分别设置有3个光电开关和1个光电开关感应片,所述3个光电开关为正限位光电开关、原点光电开关和负限位光电开关;
10.计算机装置;
11.其中,所述成像装置、所述光电感应系统和xyz轴系统与所述计算机装置电连接。
12.本发明创造性地在x轴系统、y轴系统和z轴系统中均设置有光电感应系统,光电感应系统中的光电开关均包括正限位、原点、负限位开关,对光电开关感应片的位置进行感应,可实现xyz系统的感应开关、感应复位和感应定位功能,进而能实现自动进行定位操作测量、测量过程的限位预警防控和测量后的镜头自动复位。
13.本发明原点复位系统包含感应限位、定位和复位的功能,具体原理为:
14.(1)控制计算机装置实行x轴/y轴/z轴复位时,x轴/y轴/z轴会同时向正限位移动,当触发正限位光电开关时,x轴/y轴/z轴再往回找原点光电开关,当触发原点光电开关时,x轴/y轴/z轴停止运动,即复位完成。
15.(2)随着x轴/y轴/z轴的移动,当相应的光电开关感应到有光电开关感应片时会触发信号给到计算机装置,计算机装置软件显示触发状态。例如感应片碰到正限位光电开关,
软件就会提示相应轴已触发正限位,计算机装置会报警并停止相应x轴/y轴/z轴的运动。
16.(3)当x轴/y轴/z轴三轴驱动器调试时,在计算机装置中设定好运动控制卡发多少脉冲即x轴/y轴/z轴对应移动多少距离,然后计算机装置反馈实际移动的脉冲数,由发出的脉冲和收到反馈的脉冲比较是否定位完成。
17.进一步地,所述y轴系统包括底板、设置在底板上的y轴驱动装置,所述y轴驱动装置为y轴直线电机,所述y轴直线电机包括y轴直线电机定子和y轴直线电机动子,所述底板中间为凹部,所述y轴直线电机定子为设置在凹部内的长条状长定子,所述底板上y轴直线电机定子两侧都均匀设置有两条y轴导轨,每条所述y轴导轨上设有y轴滑块,所述y轴滑块与y轴直线电机动子凸出底板的高度一致,在y轴直线电机动子和y轴滑块上部固定设置有y轴滑台。
18.进一步优选地,所述y轴系统设置有y轴光电开关,所述y轴光电开关通过光电开关导轨设置在y轴直线电机定子两端的底板上,所述光电开关导轨固定在底板上,与y轴导轨平行设置,所述y轴光电开关可在光电开关导轨上滑动,在y轴滑台底部设置有与y轴光电开关相对应的一个y轴光电开关感应片。
19.再进一步优选地,所述y轴光电开关设有3个,光电开关导轨设有2条,一条光电开关导轨上设有2个y轴光电开关,另一条光电开关导轨设有1个y轴光电开关,所述3个光电开关分别为正限位、原点和负限位开关。
20.进一步地,x轴系统包括x轴支撑座、x轴底座、x轴驱动装置,x轴支撑座设有两个,分别固定安装在y轴滑台的两端,在x轴支撑座中间固定设置有x轴底板,在x轴底板的一侧平行设置有两条x轴导轨,两条x轴导轨之间为x轴驱动装置,所述x轴驱动装置为直线电机,所述x轴驱动装置包括设置在两条x轴导轨之间的x轴直线电机定子和x轴直线电机动子,2条x轴导轨上设有x轴滑块,在x轴直线电机动子和x轴滑块上部固定设置有x轴滑台。
21.进一步优选地,在x轴底座上还设置有x轴光电开关,在x轴滑台上部设置有与x轴光电开关相对应的一个x轴光电开关感应片。
22.再进一步优选地,所述x轴光电开关设有3个,所述3个光电开关分别为正限位、原点和负限位开关。
23.进一步地,z轴系统包括z轴支撑座、z轴底座、z轴驱动系统和z轴转接板,z轴支撑座固定在x轴滑台上,z轴支撑座与z轴底座的一侧固定连接,z轴底座的另一侧设置为z轴驱动系统,所述z轴驱动系统为旋转电机,所述z轴驱动系统包括电机主体、电机侧封盖和与z轴底座平行设置的电机上盖,电机上盖上套有z轴滑台,z轴滑台的一端与旋转电机的电机主体输出端连接,实现z轴滑台的z向运动,z轴滑台另一侧固定有z轴转接板。
24.进一步优选地,在z轴底座上还设置有z轴光电开关,在z轴滑台上设置有与z轴光电开关相对应的一个z轴光电开关感应片,所述z轴光电开关感应片随着z轴滑台的移动而移动。
25.再进一步优选地,所述z轴光电开关设有3个,所述3个光电开关分别为正限位、原点和负限位开关。
26.进一步地,所述待测pcb板固定设置,且所述待测pcb板不随着xyz系统的移动而移动。
27.本发明还公开了包括上述一种pcb板线宽线距测量原点复位系统的pcb板线宽线
距测量装置。
28.相对于现有技术,本发明有益效果在于:
29.本发明创造性通过设置在可移动的x轴系统、y轴系统和z轴系统上的测量镜头,操作计算机装置,测量镜头能够在xyz三轴的带动下,使得测量镜头自动移动至待测pcb的待测点,无需操作员对待测pcb板进行手动移动位置,节省了人力,也防止由于移动待测pcb板带来的脱落、凸起、漏气和pcb板偏移的风险,提高了检测效率和精准度。同时,本发明设置有光电感应系统,光电感应系统中的光电开关均包括正限位、原点、负限位开关,对光电开关感应片的位置进行感应,可实现xyz系统的感应开关、感应复位和感应定位功能,进而能实现自动进行定位操作测量、测量过程的限位预警防控和测量后的镜头自动复位。
附图说明
30.图1是实施例1中pcb板线宽线距测量装置结构示意图。
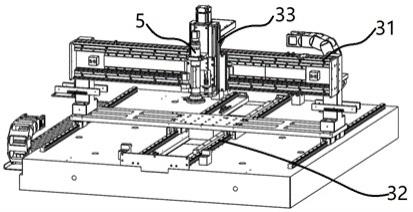
31.图2是实施例1中pcb板线宽测量原点复位系统系统结构示意图。
32.图3是实施例1中pcb板线宽测量设备的y轴系统结构示意图。
33.图4是实施例1中pcb板线宽测量设备的x轴系统结构示意图。
34.图5是实施例1中pcb板线宽测量设备的z轴系统和成像系统结构示意图。
35.图6是实施例1中pcb板线宽测量设备的pcb板固定吸附装置结构示意图。
36.图7是实施例1中pcb板线宽测量设备的pcb板固定吸附装置局部爆炸结构示意图。
37.图8是实施例1中pcb板线宽测量设备的下机架结构示意图。
38.图9是实施例1中pcb板线宽测量设备的上机架结构示意图。
39.图10是实施例1中pcb板线宽测量设备的z轴系统和成像系统结构示意图二。
40.附图标记说明:
[0041]1‑
机架;11
‑
上机架;12
‑
下机架;
[0042]2‑
pcb板固定吸附装置;21
‑
吸附平台主体;22
‑
平台架;23
‑
吸附平台固定条;24
‑
矩形框架;25
‑
支撑柱;26
‑
角固定块;27
‑
吸附区;28
‑
盖板;29
‑
吸附板;210
‑
密封板;211
‑
接风管;212
‑
吸气孔;213
‑
档条;214
‑
抽气装置;
[0043]3‑
xyz轴系统;31
‑
x轴系统;311
‑
x轴支撑座;312
‑
x轴底座;313
‑
x轴端板;314
‑
x轴底板;315
‑
x轴导轨;316
‑
x轴直线电机定子;317
‑
x轴直线电机动子;318
‑
x轴滑块;319
‑
x轴滑台;3110
‑
x轴拖链安装槽;3111
‑
x轴拖链;3112
‑
防撞胶;3113
‑
x轴固定防撞块;3114
‑
x轴光电开关;3115
‑
x轴护线槽;32
‑
y轴系统;321
‑
底板;322
‑
y轴直线电机定子;323
‑
y轴直线电机动子;324
‑
y轴导轨;325
‑
y轴滑块;326
‑
y轴滑台;327
‑
y轴拖链安装槽;328
‑
y轴拖链;329
‑
y轴固定防撞块;3210
‑
光电开关导轨;3211
‑
y轴光电开关;33
‑
z轴系统;331
‑
z轴支撑座;332
‑
z轴底座;333
‑
z轴转接板;334
‑
z轴电机主体;335
‑
z轴电机侧封盖;336
‑
z轴电机上盖;337
‑
z轴滑台;338
‑
z轴光电开关;339
‑
z轴光电开关感应片。
[0044]4‑
计算机装置;
[0045]5‑
成像装置;51
‑
镜头固定座;52
‑
测试相机;53
‑
镜筒;54
‑
自动变倍模块;55
‑
光源;56
‑
超声波传感器。
具体实施方式
[0046]
下面结合具体实施方式对本实用新型作进一步的说明。其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本实用新型的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0047]
实施例1
[0048]
本实施例公开了一种pcb板线宽线距测量原点复位系统和使用该原点复位系统的一种pcb板线宽线距测量装置。
[0049]
参见图2,本实施例提供一种pcb板线宽线距测量原点复位系统,包括:
[0050]
xyz轴系统3,其被设置为带动成像装置5运动至待测pcb板待测点上方,所述xyz轴系统包括:x轴系统31、y轴系统32和z轴系统33;
[0051]
光电感应系统,所述光电感应系统包括分别设置在x轴系统31、y轴系统32和z轴系统33上的光电开关和光电开关感应片,所述x轴系统31、y轴系统32和z轴系统33上分别设置有3个光电开关和1个光电开关感应片,所述3个光电开关为正限位光电开关、原点光电开关和负限位光电开关;
[0052]
计算机装置4;
[0053]
其中,所述成像装置5、所述光电感应系统和xyz轴系统3与所述计算机装置4电连接。
[0054]
本实施例1中一种pcb板线宽线距测量原点复位系统适合多种结构的pcb板线宽线距测量装置,下面将结合使用该原点复位系统的一种pcb板线宽线距测量装置对上述一种pcb板线宽线距测量原点复位系统和应用该系统的典型测量装置进行阐述:
[0055]
参见图1和2,为使用该原点复位系统的一种pcb板线宽线距测量设备,包括:机架1、pcb板固定吸附装置2、xyz轴系统3、计算机装置4和成像装置5。所述pcb板固定吸附装置2、xyz轴系统3、计算机装置4和成像装置5均设置在机架1上,所述pcb板固定吸附装置2用于吸附放置待测pcb板。所述xyz轴系统3包括:x轴系统31、y轴系统32和z轴系统33;所述成像装置5设置于所述z轴系统33上,z轴系统33设置在x轴系统31上,x轴系统31设置在所述y轴系统32上,所述y轴系统32用于带动x轴系统31沿y 轴移动,所述x轴系统31用于带动z轴系统33沿x 轴移动,所述z轴系统33用于带动成像装置4沿z轴移动,即:所述成像装置被xyz轴系统3带动,可沿xyz方向移动,所述成像装置5、xyz轴系统3与所述计算机装置4电连接。
[0056]
本发明设置固定的pcb板固定吸附装置2,通过设置在可移动的x轴系统31、y轴系统32和z轴系统33上的成像装置5,操作计算机装置4,使得成像装置5能够在三轴的带动下,使得成像装置4的成像范围自动移动至待测pcb的待测点,无需操作员对待测pcb板进行手动移动位置,节省了人力,也防止由于移动待测pcb板带来的脱落、凸起、漏气和pcb板偏移的风险,提高了检测效率和精准度。
[0057]
如图8和图9所示,所述机架1包括上机架11和下机架12,所述上机架11和下机架12均为框架式结构,四周设置有常规可开闭的门窗结构,所述计算机装置4设置在下机架12内,所述下机架12内还设置有抽气装置214,所述下机架12的框架式结构上固定设置xyz轴系统3,更具体的,所述下机架12的框架式结构与xyz轴系统3的y轴系统32直接接触固定。所述上机架11上还设置有状态显示台111和抽屉式键盘座112。
[0058]
图3为y轴系统32结构图,包括固定在机架1上的底板321、设置在底板321上的y轴驱动装置,y轴驱动装置为y轴直线电机,y轴直线电机包括y轴直线电机定子322和y轴直线电机动子323,底板321中间设有凹部,y轴直线电机定子322为长条状长定子,且设置在凹部内,y轴直线电机动子323为块状,且位于y轴直线电机定子322上方,可相对y轴直线电机定子322的长度范围内做往返运动,底板321上y轴直线电机定子322两侧都均匀设置有两条y轴导轨324,4条y轴导轨324上设有y轴滑块325,所述y轴滑块325与y轴直线电机动子323凸出底板321的高度一致,在y轴直线电机动子323和y轴滑块325上部固定设置有y轴滑台326。即:y轴滑台326可在y轴驱动装置的驱动下,沿y轴导轨324或者y轴直线电机定子322方向作往复运动。本实施例中,在相对y轴导轨324平行的底板321侧边固定设置有y轴拖链安装槽327,在y轴拖链安装槽327内设置有y轴拖链328。本实施例中,在底板321上靠近y轴导轨324的y轴滑块325移动路径上,设置有4个y轴固定防撞块329,所述y轴固定防撞块329分别设置在靠近y轴直线电机定子322的两条y轴导轨324的两端。
[0059]
本实施例中,y轴系统32还设置有3个y轴光电开关3211,所述y轴光电开关3211通过光电开关导轨3210设置在y轴直线电机定子322两端的底板321上,所述光电开关导轨3210固定在底板321上,其与y轴导轨324平行设置,所述y轴光电开关3211可在光电开关导轨3210上滑动,通过滑动所述y轴光电开关3211,限定所述xyz轴系统3上y轴的传感调控位置,在y轴滑台326底部设置有与y轴光电开关3211相对应的一个y轴光电开关感应片(未示出),所述y轴光电开关感应片随着y轴滑台326的移动而移动,对应3个y轴光电开关3211用于感应开关功能。
[0060]
具体地,本实施例中,y轴系统32的3个y轴光电开关3211分别为正限位、原点和负限位开关,当y轴在平台上移动时,固定在y轴滑台326底部的y轴光电开关感应片也随着移动。
[0061]
另外的,本实施例y轴系统32的两端设有y轴端板3212,所述y轴端板3212通过短板支撑块3213固定在y轴系统32两端。
[0062]
图4为x轴系统31结构图,x轴系统31包括x轴支撑座311、x轴底座312、x轴驱动装置,x轴支撑座311设有两个,分别固定安装在y轴滑台326的两端,实现x轴系统31的y向移动。在x轴支撑座311中间固定设置有x轴底板314,在x轴底板314的一侧平行设置有两条x轴导轨315,两条x轴导轨315之间为x轴驱动装置313,与y轴系统相类似,x轴驱动装置为直线电机,包括设置在两条x轴导轨315之间的x轴直线电机定子316和x轴直线电机动子317,2条x轴导轨315上设有x轴滑块318,所述x轴滑块318与x轴直线电机动子317高度一致,在x轴直线电机动子317和x轴滑块318上部固定设置有x轴滑台319。本实施例中,在x轴底板314的另一侧设置有x轴拖链安装槽3110,在x轴拖链安装槽3110内设置有x轴拖链3111。本实施例中,x轴直线电机动子317两端设置有防撞胶3112,x轴直线电机定子316的两端分别设置有1个x轴固定防撞块3113,被设置为限制x轴直线电机动子317的运动。在x轴底座312上还设置有3个x轴光电开关3114,在x轴滑台319上部设置有与x轴光电开关3114相对应的一个x轴光电开关感应片(未示出),所述x轴光电开关感应片随着x轴滑台319的移动而移动,对应3个x轴光电开关3114用于感应开关功能。具体地,本实施例中,x轴系统31的3个x轴光电开关3114分别为正限位、原点和负限位开关,当x轴在平台上移动时,固定在x轴滑台319的x轴光电开关感应片也随着移动。
[0063]
作为选择方案之一,本实施例中3个x轴光电开关3114在x轴底座312上的位置可调整,即其连接方式为可拆卸固定连接或可滑动连接,若为可滑动连接,在x轴底座312上设置相应导轨即可实现该功能,此为常规设置,本实施例不再示出相应结构图片。
[0064]
另外的,本实施例x轴系统31的两端设有x轴端板313,所述x轴端板313固定在x轴系统31两端。z轴支撑座331固定在x轴滑台319上,在z轴支撑座331上部设置有x轴护线槽3115。
[0065]
图5和图10为z轴系统33和成像装置5结构图,z轴系统33包括z轴支撑座331、z轴底座332、z轴驱动系统和z轴转接板333,z轴支撑座331固定在x轴滑台319上,可实现z轴系统33的x/y向移动,z轴支撑座331与z轴底座332的一侧固定连接,z轴底座332的另一侧为z轴驱动系统,本实施例中,z轴驱动系统为旋转电机,包括电机主体334、电机侧封盖335和与z轴底座332平行设置的电机上盖336,电机上盖336上套有z轴滑台337,z轴滑台337的一端与旋转电机的电机主体334输出端连接,实现z轴滑台337的z向运动,z轴滑台337另一侧固定有z轴转接板333。在z轴底座332上还设置有3个z轴光电开关338,在z轴滑台337上设置有与z轴光电开关338相对应的一个z轴光电开关感应片339,所述z轴光电开关感应片339随着z轴滑台337的移动而移动,对应3个z轴光电开关338用于感应开关功能。具体地,本实施例中,z轴系统33的3个z轴光电开关338分别为正限位、原点和负限位开关,当z轴在平台上移动时,固定在z轴滑台337上的z轴光电开关感应片339也随着移动。
[0066]
作为选择方案之一,本实施例中3个z轴光电开关338在z轴底座332上的位置可调整,即其连接方式为可拆卸固定连接或可滑动连接,若为可滑动连接,在z轴底座332上设置相应导轨即可实现该功能,此为常规设置,本实施例不再示出相应结构图片。
[0067]
所述成像装置5设置于所述z轴系统33上,所述z轴系统33用于带动成像装置5沿z轴移动,本实施例中:所述成像装置5被xyz轴系统3带动,可沿xyz方向移动,具体的,本实施例中,所述z轴转接板338上固定有镜头固定座51,所述成像装置5通过镜头固定座51固定安装在z轴系统33上。
[0068]
本实施例中,所述成像装置5包括相互连接的测试相机52和导航相机56。所述测试相机52下端面依次连接有镜筒53、自动变倍模块54和光源55;所述导航相机53与所述自动变倍模块54相连接。所述自动变倍模块54可以根据图形中待测点的宽度切换放大倍率,使实物成像在视野中占据合适比例。所述光源55可自动切换上下光源,调整亮度,实现光源自适应。所述光源55为上下组合环形光源。将待测pcb板放置于成像装置5下,通过调整光源亮度,镜头倍率等硬件获取图像。计算机装置4上的软件通过获取到的图像进行计算得到需要测量的尺寸。
[0069]
本实施例中,还包括与成像装置5连接的显示器(未示出),所述显示器为常规选择设置,固定在机架上。
[0070]
本实施例中,z轴转接板338上还设置有超声波传感器57,所述超声波传感器57与所述计算机装置4电连接,由于生产现场存在厚度不同的pcb板,单一的对焦高度不能完全兼容;当pcb板板厚高度不一致时容易导致成像装置5撞击到pcb板上,对仪器造成严重伤害。本实施例中超声波传感器57与成像装置5配套使用,软件可读取pcb板的上表面高度值,转换成自动对焦参数,可提升对焦效率,实时探测待测物的高度,当成像装置5到达阈值下限时启动z轴刹车,避免发生碰撞。
[0071]
参见图6和图7,本实施例中,pcb板固定吸附装置2包括吸附平台主体21和用于固定放置吸附平台主体21的平台架22。
[0072]
所述平台架22采用框架结构,包括由四根首尾相接的吸附平台固定条23形成的直接用于放置吸附平台主体21的矩形框架24、位于矩形框架24四个角落的吸附平台支撑柱25,支撑柱25用于支撑矩形框架24及吸附平台主体21。其中,吸附平台固定条23之间采用螺栓连接固定,在支撑柱25和矩形框架24之间采用螺栓固定,辅以角固定块26加强固定。
[0073]
本实施例中,所述支撑柱25固定在y轴系统32的底板321上,所述支撑柱25的高度小于x轴支撑座311的高度,所述吸附平台主体21的宽度小于y轴系统32最外侧y轴导轨324之间的距离,即所述吸附平台主体21通过平台架22固定在底板321上,位于y轴系统32和x轴系统31之间。
[0074]
本实施例中吸附平台主体21包括吸附区27和盖板28,吸附区27由表面的吸附板29、中部的密封盖210、下部的接风管211和与接风管211连通的抽气装置214组成。吸附板29表面均匀设有吸气孔212,密封盖210上设有与接风管211连通的开口,密封盖210固定在吸附板29下部,如果密封吸气孔212和与接风管211连通的开口,密封盖210与吸附板29之间形成为密闭空间,为提升密闭效果,密封盖210和吸附板29固定部位设有密封措施,如密封圈。
[0075]
采用上述结构,吸气孔212通过密封区域和接风管211与抽气装置214连接,使吸附区27表面吸附板29具有吸附性,将待测量pcb板吸附于吸附板29表面,此时pcb板被均匀吸附。
[0076]
接风管211采用长条形,设有三个,均匀、并排设置在密封盖210上,与密封盖210螺栓固定,对应每个接风管211的密封盖210部位,设有与密闭空间连通的开口,本实施例优选均匀设有12个开口214,每个接触固定区域设有4个开口214,为加强吸附效果,接风管211与密封盖210固定部位设有密封措施,如密封圈。
[0077]
为更好地对待侧pcb板进行限位,在吸附板29表面还固定设有档条213,除吸附板29与盖板28接触的周向外,其余三周向,档条213均匀设置。
[0078]
综上,上述的pcb板固定吸附装置2采用真空吸附的方式,可保证了pcb板可靠吸附,也有效杜绝了中部凸起、翘边、漏气等现象发生,提高检测精度和效率。
[0079]
本实施例中测量设备中,xyz轴系统3、光电感应系统和计算机装置4组成了pcb板线宽线距测量原点复位系统,其中,x轴系统、y轴系统和z轴系统中光电开关和光电开关感应片组成了pcb板线宽线距测量装置的光电感应系统,每个系统的光电开关均包括正限位、原点、负限位开关,所述光电感应系统可实现pcb板线宽线距测量装置xyz系统的感应开关、感应复位和感应定位功能,在本实施例中,该功能具体表现为:
[0080]
(1)随着x轴/y轴/z轴的移动,当相应的光电开关感应到有感应片时会触发信号给到计算机装置4,计算机装置4软件显示触发状态。例如感应片碰到正限位光电开关,软件就会提示相应轴已触发正限位,计算机装置4会报警并停止x轴/y轴/z轴的运动。
[0081]
(2)当控制计算机装置4实行x轴/y轴/z轴复位时,x轴/y轴/z轴同时向正限位移动,当触发正限位光电开关时,x轴/y轴/z轴再往回找原点光电开关,当触发原点光电开关时,x轴/y轴/z轴停止运动,即复位完成。
[0082]
(3)当xyz系统三轴驱动器调试时,在计算机装置4中设定好运动控制卡发多少脉冲即x轴/y轴/z轴对应移动多少距离,然后计算机装置4反馈实际移动的脉冲数,由发出的
脉冲和收到反馈的脉冲比较是否定位完成。
[0083]
本实施例公开了一种pcb板线宽线距测量原点复位系统和使用该原点复位系统的一种pcb板线宽线距测量装置,其中,一种pcb板线宽线距测量原点复位系统也适用于其他不同结构的pcb线宽线距测量装置,本实施例中所示测量装置仅为优选应用示例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1