非接触式设备运行状态监测装置的制作方法
1.本实用新型涉及设备监测技术领域,尤其涉及一种非接触式设备运行状态监测装置。
背景技术:
2.传统的人工要想检查设备运转是否正常,会使用一种工具,像长长的探针,一头靠近设备,另外一头靠近耳朵来倾听声音是否正常,用手触摸或用手持式温度计测量设备工作时的外表温度,再结合耳朵听到的噪音大小,来判断设备是异常,这种检测方式明显主观性较强,检测结果不准确。
3.随着机器人技术的发展,特别是集成环境感知、自主路径规划和自主避障的移动机器人技术,结合多传感器柔性融合技术,可实现电厂设备巡点检的自动化与智能化,如何通过智能机器人获取准确的设备运行状态是本领域技术人员目前需要解决的技术问题。
技术实现要素:
4.本实用新型所要解决的技术问题在于能够通过智能机器人获取准确的设备运行状态的非接触式设备运行状态监测装置。
5.本实用新型是通过以下技术手段实现解决上述技术问题的:非接触式设备运行状态监测装置,包括智能巡检机器人(1)、云台(2)、激光测振仪(3)、红外热成像传感器(4)、声纹故障特征识别设备(5);所述云台(2)通过活动连接部连接在所述智能巡检机器人(1)上,所述激光测振仪(3)、红外热成像传感器(4)、声纹故障特征识别设备(5)分别安装在所述云台(2)上。智能巡检机器人能够沿巡检路径或固定轨道移动行进和停靠在巡检停靠点,云台通过活动连接部可以相对于智能巡检机器人运动,以调整激光测振仪、红外热成像传感器、声纹故障特征识别设备的位置,激光测振仪用于检测设备的振动,红外热成像传感器用于检测设备的温度,声纹故障特征识别设备用于采集待测设备的声纹特征,从而能够通过智能机器人获取准确的设备运行状态。
6.作为优化的技术方案,所述活动连接部包括具有多个自由度的万向轴。云台通过活动连接部可以相对于智能巡检机器人水平旋转、上下翻转或左右翻转。
7.作为优化的技术方案,所述活动连接部包括竖直升降机构。云台通过活动连接部可以相对于智能巡检机器人竖直升降。
8.作为优化的技术方案,所述激光测振仪(3)安装在所述云台(2)的顶部,所述红外热成像传感器(4)、声纹故障特征识别设备(5)分别安装在所述云台(2)的两侧。
9.作为优化的技术方案,所述智能巡检机器人(1)设有自主导航模块和自主避障模块。标定设备的实际监测点的位置,再将这些位置信息输入至智能巡检机器人中,使智能巡检机器人将监测点的位置信息作为其行走过程中的巡检停靠点,当经过巡检停靠点时,智能巡检机器人停止行走。
10.作为优化的技术方案,所述智能巡检机器人(1)设有定位模块、通信模块、控制模
块、驱动模块、行走模块,所述定位模块用于实时扫描设备的振动检测点上的定位码,所述通信模块用于将待测振动检测点的位置信息实时传输至所述控制模块,所述控制模块用于将接收到的位置信息发送给所述驱动模块,所述驱动模块用于驱动所述行走模块。通过智能巡检机器人的定位模块、通信模块、控制模块、驱动模块、行走模块,使激光测振仪和红外热成像传感器能够完成第一次定位。
11.作为优化的技术方案,所述云台(2)存储有激光测振仪预制位装置和红外热成像传感器预制位装置。云台通过自主调用激光测振仪预制位装置和红外热成像传感器预制位装置,使激光测振仪和红外热成像传感器能够完成第二次定位,进行两次定位,使得激光测振仪和红外热成像传感器在每一次巡检时的停留位置基本一致,使检测点的检测结果偏差小,检测结果更准确。
12.作为优化的技术方案,该非接触式设备运行状态监测装置还包括通信部、后台处理部,所述通信部用于向所述后台处理部实时传输所述激光测振仪(3)、红外热成像传感器(4)、声纹故障特征识别设备(5)测得的振动、温度、声纹数据,所述后台处理部用于将模拟数据转化为数字数据,并比较处理后的数据是否小于等于预设的缺陷阈值。
13.本实用新型的优点在于:
14.1、能够通过智能机器人获取准确的设备运行状态。
15.2、通过智能巡检机器人和云台对激光测振仪和红外热成像传感器进行两次定位,使得激光测振仪和红外热成像传感器在每一次巡检时的停留位置基本一致,使检测点的检测结果偏差小,检测结果更准确。
附图说明
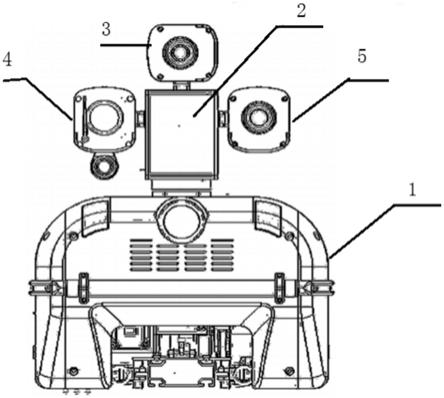
16.图1是本实用新型实施例非接触式设备运行状态监测装置的结构示意图。
具体实施方式
17.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.如图1所示,非接触式设备运行状态监测装置,包括智能巡检机器人1、云台2、激光测振仪3、红外热成像传感器4、声纹故障特征识别设备5。
19.云台2通过活动连接部连接在智能巡检机器人1上,所述活动连接部包括具有多个自由度的万向轴和竖直升降机构,云台2通过所述活动连接部可以相对于智能巡检机器人1竖直升降、水平旋转、上下翻转或左右翻转,以调整激光测振仪3、红外热成像传感器4、声纹故障特征识别设备5的位置;激光测振仪3用于检测设备的振动,红外热成像传感器4用于检测设备的温度,声纹故障特征识别设备5用于采集待测设备的声纹特征;激光测振仪3安装在云台2的顶部,红外热成像传感器4、声纹故障特征识别设备5分别安装在云台2的两侧,激光测振仪3、红外热成像传感器4、声纹故障特征识别设备5也可以安装在云台2的任意外表面上,安装位置只要满足能够检测到待测设备上所有的振动检测点即可。
20.智能巡检机器人1设有自主导航模块和自主避障模块,可沿巡检路径或固定轨道移动行进,智能巡检机器人1的巡检任务包括巡检路线和巡检停靠点;巡检停靠点与设备监测点有关,根据设备的实际,标定设备的实际监测点的位置,再将这些位置信息输入至智能巡检机器人1中,使智能巡检机器人1将监测点的位置信息作为其行走过程中的巡检停靠点,当经过巡检停靠点时,智能巡检机器人1停止行走。
21.智能巡检机器人1设有定位模块、通信模块、控制模块、驱动模块、行走模块;所述定位模块用于实时扫描设备的振动检测点上的定位码,以实现精确定位导航;所述通信模块用于将待测振动检测点的位置信息实时传输至所述控制模块;所述控制模块用于将接收到的位置信息发送给所述驱动模块;所述驱动模块用于驱动所述行走模块;从而使智能巡检机器人1移动至设备处,完成第一次定位。
22.云台2存储有激光测振仪预制位装置和红外热成像传感器预制位装置,云台2通过自主调用激光测振仪预制位装置和红外热成像传感器预制位装置,以调整激光测振仪3和红外热成像传感器4的位置,使激光测振仪3和红外热成像传感器4均能精确地定位到待测的振动检测点上,且满足激光测振仪3的光束与振动设备的检测位置相互垂直,完成第二次定位。
23.通过智能巡检机器人1和云台2对激光测振仪3和红外热成像传感器4进行两次定位,使得激光测振仪3和红外热成像传感器4在每一次巡检时的停留位置基本一致,使检测点的检测结果偏差小,检测结果更准确。
24.该非接触式设备运行状态监测装置还包括通信部、后台处理部,所述通信部用于向所述后台处理部实时传输所述激光测振仪3、红外热成像传感器4、声纹故障特征识别设备5测得的振动、温度、声纹数据,所述后台处理部用于将测得的振动、温度、声纹模拟数据转化为数字数据,并比较处理后的数据是否小于等于预设的缺陷阈值。
25.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1