扫描振镜、弹性构件、镜托总成、镜托与动件的总成的制作方法
1.本技术涉及激光雷达技术领域,具体涉及一种扫描振镜、弹性构件、镜托总成、镜托与动件的总成。
背景技术:
2.激光雷达,通常用于探测物体以及测量与物体之间的距离等。例如,在无人驾驶领域使用激光雷达对行驶方向上的一定空间范围扫描探测,车用激光雷达可以采用光运行时间(time of flight,tof)测量方法来测量物体与车辆之间的距离,tof测距原理参考图1所示,激光雷达101’中的发射器101’a发射一个红外光束脉冲,此时设置在激光雷达101’中的计时器102’记录下发射脉冲的时间,红外光束探测到物体103’后返回并由激光雷达101’中的接收器101’b接收,此时计时器102’记录下接收时间。计时器102’先后记录的两个时间相减即得到了光的“飞行时间”,而光速是一定的,从而计算出物体103’与激光雷达101’之间的距离。
3.为了使激光雷达能够实现更大的探测范围,通常在激光雷达中使用扫描振镜实现激光旋转扫描。参考图2a至2c所示,激光雷达101’的发射器下方设置有扫描振镜200’,在激光雷达101’的水平扫描平面上,当扫描振镜200’旋转至图2a所示位置时,激光雷达101’发出的探测光束经过扫描振镜200’反射后的探测光束沿图2a中1011a所示轨迹发射及返回;当扫描振镜200’沿图2a中箭头所示方向转动至图2b所示位置时,激光雷达101’发出的探测光束经过扫描振镜200’反射后的探测光束沿图2b中1011b所示轨迹发射及返回;当扫描振镜200’沿图2b中箭头所示方向继续转动至图2c所示位置时,激光雷达101’发出的探测光束经过扫描振镜200’反射后沿图2c中1011c所示轨迹向外发射进行探测。如此,激光雷达101’所发出的探测光束能够探测到更大空间范围内的物体103’,激光雷达101’及其所发出的探测光束与物体103’的相对位置可以分别参考图2a至2c中下方的矩形框内所示。
4.在上述2a至2c所示的激光旋转扫描场景中,扫描振镜实现激光旋转扫描的原理是在线圈中通电产生电磁力,驱动扫描振镜中的反射镜旋转,以达到一定扫描角度的作用。驱动方式分为高频谐振式和低频准静式两种。其中高频谐振式具有频率高、扫描角度大等特点,但扫描角度越大相应的应力水平也越高,故而会降低旋转结构的使用寿命。因此,现有的扫描振镜在保持较高谐振频率的条件下难以兼顾大扫描角度以及高使用寿命。
技术实现要素:
5.本技术的目的在于解决现有技术中扫描振镜在保持较高谐振频率的条件下难以兼顾大扫描角度和高使用寿命的要求的问题。因此,本技术实施例提供了一种扫描振镜、弹性构件、镜托总成、镜托与动件的总成,通过改进扫描振镜上的弹性构件的结构,采用呈轴对称的非封闭式的条形弹性材料,并且该弹性构件与扫描振镜的镜托和动件相连的连接端至少有3个,从而实现在扫描振镜工作时,通过形变产生旋转的弹性构件既能适应较高谐振频率的工作条件,又能处于较低的应力水平,从而能够提高扫描振镜旋转结构的使用寿命,
并具有较大的旋转角度,即能够同时满足扫描角度大和高使用寿命要求。
6.第一方面,本技术实施例提供了一种弹性构件,弹性构件是由条形弹性材料弯折形成,弹性构件相对于对称轴呈轴对称的非封闭式结构,其中,弹性构件上用于与第一部件相接的连接端包括至少两个关于对称轴对称并位于对称轴外的条形弹性材料的自由端;弹性构件上用于与第二部件相接的连接端包括:位于对称轴上的条形弹性材料的至少一个自由端,或者,至少两个关于对称轴对称并位于对称轴外的条形弹性材料的自由端,或者,相交于对称轴上的条形弹性材料的相交端。
7.即本技术的弹性构件是轴对称结构,并且弹性构件作为连接件使用时能够提供至少2个轴对称的偶数个连接端与第一部件相连、能够提供至少1个连接端与第二部件相连,当弹性构件与第二部件相连的连接端为奇数时,弹性构件与第二部件相连的某个连接端须在对称轴上并且其他连接端关于对称轴对称;当弹性构件与第二部件相连的连接端为偶数时,弹性构件与第二部件相连的连接端须均匀分布在对称轴两侧并且关于对称轴对称。
8.其中,条形弹性材料的自由端是指非封闭的条形弹性材料结构上不与该条形弹性材料的其他部分相连的端体或端部,在一些实施例中,该自由端也是该条形弹性材料的非封闭端或开口端。可以理解,条形弹性材料的相交端可以是固定连接形成,例如焊接,也可以一体成型形成。
9.例如,本技术的弹性构件为条形金属弹片或者金属条弯折形成的连接件,在另一些实施例中,本技术的弹性构件也可以是通过浇注等工艺一体成型的条形弹性结构。
10.在上述第一方面的一种可能的实现中,条形弹性材料包括一个直线段和两个弯折段,直线段位于对称轴上,两个弯折段关于对称轴对称并位于对称轴的两边;并且直线段的一端与两个弯折段的一端相交于对称轴上,其中,直线段的另一端作为弹性构件上用于与第二部件相接的连接端,两个弯折段的另一端作为弹性构件上用于与第一部件相接的连接端。
11.即弹性构件与第一部件、第二部件相接的连接端有3个,并且其中1个连接端是条形弹性材料的直线段上不与2个弯折段相交的自由端,直线段位于弹性构件的对称轴上,该直线段与2个弯折段的相交端和该直线段的自由端也位于弹性结构的对称轴上,可以理解,直线段与2个弯折段的相交端可以是固定连接相交,例如焊接,也可以是一体成型相交。2个弯折段各自的另一个自由端,分别作为两个轴对称的连接端。
12.例如,第一部件是安装有反射镜的镜托,第二部件是动件时,弹性构件的对称轴上的连接端可以与镜托相接,弹性构件上轴对称的两个连接端可以与动件相接。
13.在上述第一方面的一种可能的实现中,两个弯折段的另一端是垂直于对称轴并且反向延伸的条形弹性材料的自由端。
14.在上述第一方面的一种可能的实现中,条形弹性材料包括一个直线段和四个弯折段,直线段位于对称轴上,四个弯折段关于对称轴对称并位于对称轴的两边;并且直线段的一端与其中两个轴对称的弯折段的一端相交于对称轴上,其中,直线段的另一端作为弹性构件上用于与第二部件相接的连接端,其中两个轴对称的弯折段的另一端作为弹性构件上用于与第一部件相接的连接端;另外两个轴对称的弯折段的一端相交于对称轴上,另外两个轴对称的弯折段的另一端作为弹性构件上用于与第一部件相接的连接端。
15.即弹性构件与第一部件、第二部件相接的连接端有5个,并且其中1个连接端是条
形弹性材料的直线段的自由端,直线段位于弹性构件的对称轴上,该直线段的另一端与其中两个轴对称的2个弯折段的各自一端相交,形成相交端,该相交端和该直线段上作为1个连接端的自由端均位于弹性结构的对称轴上。可以理解,上述相交端可以是固定连接相交,也可以是一体成型相交。另外2个轴对称的弯折段的各自一端相交于直线段上两端之间的部分形成相交点,可以理解,该相交点处可以是固定连接形成,例如焊接,也可以是一体成型形成,另外2个轴对称的弯折段的各自的另一自由端分别作为另外两个关于轴对称的连接端。
16.在上述第一方面的一种可能的实现中,条形弹性材料包括一个直线段和四个弯折段,直线段位于对称轴上,四个弯折段关于对称轴对称并位于对称轴的两边;并且直线段的一端与其中两个轴对称的弯折段的一端相交于对称轴上,直线段的另一端与另外两个轴对称的弯折段的一端相交于对称轴上;其中两个轴对称的弯折段的另一端作为弹性构件上用于与第一部件相接的连接端,另外两个轴对称的弯折段的另一端作为弹性构件上用于与第二部件相接的连接端。
17.即条形弹性材料的直线段两端分别连接两个对称的弯折段的各自一端,各弯折段的各自另一端对称分布在对称轴两侧形成4个轴对称的连接端,其中2个连接端与第一部件连接,另外2个连接端与第二部件连接。
18.在上述第一方面的一种可能的实现中,条形弹性材料包括两个弯折段,两个弯折段关于对称轴对称并位于对称轴的两边,其中,两个弯折段的一端相交于对称轴上形成相交端,相交端作为弹性构件上用于与第二部件相接的连接端;两个弯折段的另一端作为弹性构件上用于与第一部件相接的连接端。
19.即条形弹性材料的2个弯折段的各自一端相交于一点,形成的相交端作为1个连接端,并且该连接端位于弹性构件的对称轴上;条形弹性材料的2个弯折段的各自另一端是自由端,分别形成2个连接端,并且这2个连接端对称分布在对称轴的两侧。例如,第一部件是安装有反射镜的镜托,第二部件是动件时,位于对称轴上的1个连接端可以与镜托固定连接或一体成型,位于对称轴两侧的2个连接端可以与动件固定连接或一体成型。
20.第二方面,本技术实施例提供了一种扫描振镜,包括反射镜、镜托、动件和基座,反射镜固定于镜托上,动件与基座通过销轴连接,动件能够绕销轴的中心线相对于基座转动;扫描振镜还包括上述弹性构件;其中,动件作为与弹性构件相接的第一部件,镜托作为与弹性构件相接的第二部件;或者镜托作为与弹性构件相接的第一部件,动件作为与弹性构件相接的第二部件;并且镜托通过弹性构件可绕弹性构件的对称轴相对于动件转动,弹性构件的对称轴与销轴的中心线之间相互垂直。
21.本技术所提供的扫描振镜,通过采用上述由轴对称的非封闭式的条形弹性材料构成的弹性构件,将上述弹性构件上的至少3个连接端分别与镜托和动件固定连接或一体成型,从而实现镜托借助于弹性构件的形变产生的旋转相对于动件转动,固定于镜托上的反射镜随之产生旋转,最终使得扫描振镜实现激光雷达的扫描功能,基于上述弹性构件能够满足较高谐振频率的要求,并且能够同时满足扫描角度大和高使用寿命的要求,因此,本技术所提供的扫描振镜也具有高寿命且扫描角度大的特点,利于提高激光雷达的扫描性能。
22.上述扫描振镜中用于固定反射镜的镜托,可以通过上述各种结构形式的弹性构件与动件连接,并且镜托带动反射镜在弹性构件的弹性基础上,可以相对于动件绕弹性构件
的对称轴转动。弹性构件的两端与镜托、动件连接的情形,可以包括多种,例如第一部件是安装有反射镜的镜托、第二部件是动件时,上述弹性构件的位于对称轴两侧对称的连接端可以连接镜托、位于对称轴上的连接端可以连接动件;在另一些实施例中,第一部件也可以是动件、第二部件是安装有反射镜的镜托,则上述弹性构件的位于对称轴两侧对称的连接端还可以连接动件、位于对称轴上的连接端连接镜托。另外,弹性构件的对称轴与销轴的中心线可以相互垂直或大体垂直,即允许具体实施过程中弹性构件的对称轴与销轴的中心线在一定的偏角误差范围内相互垂直的情形。在此不做限制。
23.在上述第二方面的一种可能的实现中,扫描振镜还包括:磁性部件和线圈,其中,磁性部件与反射镜分别固定于镜托的上下两面上,线圈包括缠绕方向相互垂直的第一线圈和第二线圈,并且第一线圈通电后产生使磁性部件带动反射镜绕弹性构件的对称轴转动的电磁力;第二线圈通电后产生使磁性部件带动反射镜绕销轴的中心线转动的电磁力。也就是说,本技术提供的扫描振镜在上述弹性构件的结构优势基础上,采用作用方向更加直接的电磁力驱动旋转,在这种电磁力的作用下,基于弹性构件的对称结构,扫描振镜中的反射镜在旋转时不会产生其他方向的旋转分量,使得反射镜的旋转角度更加便于控制,即扫描振镜的控制精度也能够有所提高。
24.即本技术的扫描振镜还可以在磁性部件(比如,磁石)的设置和线圈的布置方面做出改进,例如采用1个磁石固定在镜托下表面,而反射镜固定于镜托的上表面,位于磁石下方的第一线圈和第二线圈也采用在同一塑胶板缠绕并且缠绕方向相互垂直的方式,当第一线圈通电时,第一线圈与磁石相互作用形成电磁力,驱动镜托和反射镜相对于动件转动,或者说绕x轴旋转,其中x轴为虚拟坐标轴,其与扫描振镜中弹性构件的对称轴在同一直线上。同理,当第二线圈通电时,第二线圈与磁石相互作用形成电磁力,驱动、动件(带动镜托和反射镜)一起相对于销轴转动,或者说绕y轴旋转,其中y轴也为虚拟坐标轴,其与扫描振镜中销轴的中心线在同一直线上。这种改进结构,优化了磁石数量及设置位置,利于节省扫描振镜的内部空间,并且能够更加精准的控制线圈通电后对磁石的作用力,能够实现扫描振镜在x轴和y轴方向转动角度的更精确控制。
25.第三方面,本技术实施例提供了一种镜托总成,包括:上述弹性构件,以及用于固定反射镜的镜托,弹性构件与镜托固定连接或一体成型;其中,镜托作为与弹性构件相接的第一部件;或者镜托作为与弹性构件相接的第二部件。
26.本技术所提供的镜托总成,通过采用上述由轴对称的非封闭式的条形弹性材料构成的弹性构件,将上述弹性构件上的至少3个连接端中的至少1个连接端与镜托固定连接或一体成型,形成该镜托总成结构,从而实现该总成在于动件连接后,镜托能够借助于弹性构件的形变产生的旋转相对于动件转动,固定于镜托上的反射镜随之产生旋转。基于上述弹性构件能够满足较高谐振频率的要求,并且能够同时满足扫描角度大和高使用寿命的要求,本技术所提供的镜托总成也能够具有较高寿命,并且使得固定于镜托上的反射镜能够达到较大的旋转扫描角度,满足要求。
27.上述一体成型的镜托总成中,用于与动件连接的弹性构件采用上述各种结构形式的弹性构件,其中弹性构件与镜托总成中的镜托固定连接或一体成型的连接端可以是位于对称轴上的连接端、也可以是位于对称轴两侧的轴对称连接端。如果弹性构件的连接端是偶数个,则任意一侧轴对称的连接端与镜托固定连接或一体成型形成镜托总成均可,在此
不做限制。
28.第四方面,本技术实施例提供了一种镜托与动件的总成,包括:上述弹性构件,以及用于固定反射镜的镜托和动件,弹性构件与镜托固定连接或一体成型、弹性构件与动件固定连接或一体成型,其中,镜托作为与弹性构件相接的第一部件、动件作为与弹性构件相接的第二部件;或者镜托作为与弹性构件相接的第二部件、动件作为与弹性构件相接的第一部件。
29.本技术所提供的镜托与动件的总成,通过采用上述由轴对称的非封闭式的条形弹性材料构成的弹性构件,将上述弹性构件上的至少3个连接端分别与镜托和动件固定连接或一体成型,形成该总成结构,从而实现镜托能够借助于弹性构件的形变产生的旋转相对于动件转动,固定于镜托上的反射镜随之产生旋转。基于上述弹性构件能够满足较高谐振频率的要求,并且能够同时满足扫描角度大和高使用寿命的要求,本技术所提供的镜托与动件的总成也能够具有较高寿命,并且使得固定于镜托上的反射镜能够达到较大的旋转扫描角度,满足要求。另外,基于弹性构件的对称结构,镜托相对于动件转动时,弹性构件仅绕对称轴产生旋转,不会产生其他旋转分量,因此,上述镜托与动件的总成在实际使用过程中也能够便于控制旋转角度,利于提高采用该总成结构的扫描振镜的控制精度。
30.即一体成型的镜托与动件的总成中,用于连接镜托和动件的弹性构件采用上述各种结构形式的弹性构件,其中,镜托、弹性构件和动件的连接顺序包括两种情形,一种情形是弹性构件上与镜托固定连接一体成型的连接端是位于对称轴上的连接端、与动件固定连接或一体成型的是位于对称轴两侧的轴对称连接端;另一种情形是弹性构件上与镜托固定连接或一体成型的连接端是位于对称轴两侧的轴对称连接端、与动件固定连接或一体成型的是位于对称轴上的连接端。如果弹性构件的连接端是偶数个,则弹性构件上任意一侧轴对称的连接端与镜托固定连接或一体成型、另一侧轴对称的连接端与动件固定连接或一体成型形成镜托与动件的总成均可,在此不做限制。
31.本技术的有益效果是:既能够适应较高谐振频率的工作条件,又能够同时满足扫描角度大和高使用寿命的要求;另外,镜托通过弹性构件连接动件,基于其中弹性构件的对称结构设计,镜托相对于动件转动时,弹性构件仅绕对称轴产生旋转,不会产生其他旋转分量,因此在实际使用过程中也能够便于控制镜托相对于动件转动的旋转角度,最终利于提高扫描振镜以及激光雷达的控制精度。
附图说明
32.图1所示为激光雷达所采用的tof测距原理示意图。
33.图2a至2c所示为激光雷达旋转扫描的原理示意图。
34.图3a至3c所示为扫描振镜在无人驾驶汽车领域的应用场景示意图。
35.图4a至4c所示为一种扫描振镜的结构示意图。
36.图5所示为本技术实施例1提供的扫描振镜的立体结构示意图。
37.图6所示为本技术实施例1提供的扫描振镜的爆炸结构示意图。
38.图7所示为本技术实施例1提供的扫描振镜中塑胶板主视方向上线圈绕塑胶板缠绕的缠绕方向示意图。
39.图8所示为本技术实施例1提供的扫描振镜中弹性构件的一种实施方式的结构示
意图。
40.图9a至9d所示为本技术实施例1提供的扫描振镜中弹性构件的另一种实施方式的结构示意图。
41.图10所示为本技术实施例2提供的扫描振镜中弹性构件的一种实施方式的结构示意图。
42.图11a至11d所示为本技术实施例2提供的扫描振镜中弹性构件的另一种实施方式的结构示意图。
43.图12所示为本技术实施例3提供的扫描振镜中弹性构件的一种实施方式的结构示意图。
44.附图标记说明:
45.101
’‑
激光雷达;101’a-发射器;101’b-接收器;102
’‑
计时器;103
’‑
物体;
46.1011a、1011b、1011c-探测光束轨迹;
47.101-激光雷达;103-物体;101a-激光发射器;
48.200-扫描振镜;140-反射镜;131/132-线圈;121-第一支撑框;122-第一扭力梁;123-第二支撑框;124-第二扭力梁;110-固定支架;022-直杆扭力梁;
49.300-汽车;301-探测光束;301a-反射镜未旋转时所反射的反射光束;301b-反射镜正向旋转α角时所反射的反射光束;301c-反射镜反向旋转α角时所反射的反射光束;
50.200a-扫描振镜;210a-反射镜;220a-动件;230a-弹性构件;801-直线段;802、803-弯折段;801p、802p、803p-连接端;240a-镜托;250a-磁石;260a-销轴;270a-基座;271a、272a、273a-基座的组成部分;280a-线圈;281a-高频线圈;282a-低频线圈;290a-传感器板;120a-飞线;110a-塑胶板;
51.230b-弹性构件;1001-直线段;1002、1003、1004、1005-弯折段;1001p、1002p、1003p、1004p、1005p-连接端;
52.230c-弹性构件;1201、1202-弯折段;1201p、1202p、1203p-连接端。
具体实施方式
53.为了实现对上述扫描振镜的连接结构进行优化设计的目的,本技术提出了一种扫描振镜、弹性构件、镜托总成、镜托与动件的总成,通过在扫描振镜中采用具有特定结构的弹性构件,实现在高频率谐振驱动方式下,扫描振镜仍能够达到较大范围的扫描角度并且具有较长的使用寿命。下面结合具体场景和相关附图详细介绍本技术的扫描振镜及弹性构件。
54.如上所述,激光雷达内通过设置扫描振镜来实现激光旋转扫描,以探测一定空间范围内的物体,因此扫描振镜的结构在一定程度上决定了激光扫描角度的大小,进而决定激光雷达所能够探测的空间范围大小。其中,扫描振镜实现激光旋转扫描的原理是,扫描振镜中设置的线圈通电产生电磁力,驱动扫描振镜中的反射镜旋转,从而引起入射到反射镜上的激光的反射光线的反射角发生偏转扩大反射激光扫描范围,以使激光雷达实现较大范围的扫描角度。驱动反射镜旋转的驱动方式包括高频谐振式和低频准静式两种,双轴扫描振镜(下称扫描振镜)一般同时包含这两种驱动方式。
55.其中,高频谐振式因具有频率高,扫描角度大的特点,一般应用于要求较高扫描频
率和较大扫描角度的使用场景中。但在实际使用中,扫描角度越大,扫描振镜结构所受到的应力水平也会越高,容易折损扫描振镜中的连接结构从而减少扫描振镜的使用寿命。因此需要对扫描振镜中的连接结构进行优化设计,确保扫描振镜能够在预设高频谐振驱动下,满足扫描角度要求的同时也能够满足更高的使用寿命要求。
56.图3a至3b示出了扫描振镜在无人驾驶汽车领域的应用场景示意图。
57.如图3a所示,该场景包括汽车300、激光雷达101以及位于激光扫描范围内的物体103。其中,激光雷达101安装在汽车300的车头车灯位置处。可以理解,汽车300行驶过程中,汽车300的行驶方向上通过成像装置以及车载激光雷达探测装置(图中均未示出)来探测物体,实现对周围环境的感知,其中成像装置用于探测汽车300正前方行驶方向上的物体,激光雷达例如安装在成像装置的两侧,用于探测汽车300行驶方向上两侧的物体。参考上述图3a至图3c所示,激光雷达101中设置有扫描振镜200(参见图4a),以扩大对汽车300行驶方向上两侧的探测范围,扫描振镜200反射激光发射器发出的激光线束,扩大激光雷达的扫描角度。
58.为了便于理解,图3c示出了图3a或3b所示场景中激光雷达101所发出的探测光束经扫描振镜200反射后射出的光路示意图。
59.如图3c所示,激光雷达101中的激光发射器101a所发出的探测光束301在扫描振镜200中的反射镜140(参见图4a)未发生旋转时,该激光光束301通过扫描振镜200(参见图4a)反射后的反射光束为图3c所示的301a;当扫描振镜200中的反射镜140(参见图4a)旋转至图3c所示位置时(记为正向旋转),例如旋转角度为α,则此时该激光光束301通过扫描振镜200(参见图4a)反射后的反射光束为图3c所示的301b,反射光束301b相对于上述反射光束301a的偏转角度为2α。可以理解,当扫描振镜200中的反射镜140(参见图4a)向图3c所示位置相对于301a所在直线的镜像位置方向旋转α角时(记为反向旋转),该激光光束301通过扫描振镜200(参见图4a)反射后的反射光束为图3c所示的301c,反射光束301c相对于上述反射光束301a的偏转角度也为2α。由此可知,当扫描振镜200的反射镜140(参见图4a)往复旋转α角时,激光雷达101可探测的视场角fov可以达到4α。可以理解,在另一些实施例中,激光雷达101中的激光发射器101a与扫描振镜200(参见图4a)的相对位置还可以是不同于图3c所示的其他形式,在此不做限制。
60.例如,扫描振镜200的反射镜140(参见图4a)能够偏转的角度α为15
°
时,则激光雷达101可探测的视场角fov可以达到60
°
。则在图3a所示的场景中,两组激光雷达测装置能够实现的综合视场角fov则可以达到60
°
至120
°
的范围(参考图3a所示的安装角度)内,其中综合视场角fov最大可以达到120
°
(参考图3b所示的安装角度)。
61.针对图3a所示场景,图4a至4c示出了一种扫描振镜200的结构示意图。
62.如图4a所示,该扫描振镜200的具体结构包括:反射镜140置于第一支撑框121上,第一支撑框121通过第一扭力梁122与第二支撑框123连接,第二支撑框123通过第二扭力梁124与固定支架110连接。磁铁位于固定支架110的槽内,线圈131/132走线布置参考图4b所示。振镜工作状态时,线圈131/132通电产生电磁力,驱动反射镜140绕图4b所示的x和y轴分别做旋转运动,从而实现激光雷达101(参见图3a和图3b)水平方向及垂直方向上的扫描功能。
63.如图4a所示,第一扭力梁122为异形扭力梁结构,形状为非直线延伸型,取代了图
4c所示的传统单一直杆扭力梁022,可以降低第一扭力梁122的整体刚度,增大反射镜140围绕第一方向x的转角范围,从而降低第一扭力梁122的整体应力,延长使用寿命。
64.虽然,图4c所示的第一扭力梁122结构相对于直杆扭力梁022结构能够降低应力、延长扫描振镜200的使用寿命,但在实际使用中发现,第一扭力梁122的应力降低幅度有限,且第一扭力梁122的谐振频率也会相应降低,而对于高频谐振式的扫描振镜,往往需要达到一定谐振频率才能满足激光雷达在水平扫描平面上的高频扫描功能要求。
65.可以理解,汽车300上的激光雷达101基于扫描振镜200所能够实现的水平扫描范围越大,汽车300则能够探测到行驶方向左右两侧更大范围内的物体,这有利于提高汽车300对周围环境的感知能力。同时为了提高汽车300对周围环境的及时感知能力,则要求激光雷达101的水平扫描平面上具有较高的扫描频率,因此安装于激光雷达101中的扫描振镜200则相应地在雷达水平扫描平面上的往复旋转需要保持较高的谐振频率,以满足激光雷达实现高频探测扫描的需求。例如激光雷达101中安装有上述扫描振镜200,在水平扫描平面上预设的水平扫描频率为250hz,对于垂直于地面的垂直扫描平面上预设的垂直扫描频率为10hz,则扫描振镜200中相应的高频谐振式结构的工作频率须达到250hz,上述图4a至4c所示的扫描振镜结构很难实现在250hz的高频谐振状态下保持较小的应力水平同时保持较大的旋转角度。
66.下面结合实施例1至实施例3具体说明本技术所提供的扫描振镜的改进结构。
67.实施例1
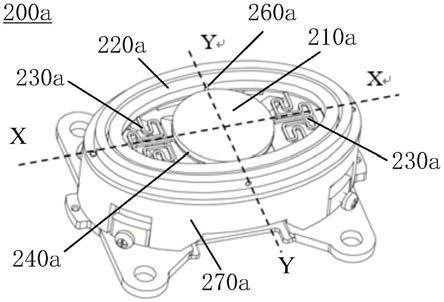
68.图5示出了本技术实施例所提供的扫描振镜200a的一种立体结构示意图。
69.如图5所示,扫描振镜200a包括反射镜210a、动件220a、弹性构件230a、镜托240a以及基座270a,反射镜210a固定在镜托240a的上表面,镜托240a通过弹性构件230a与动件220a相接;动件220a与基座240a通过销轴260a连接,动件220a能够以销轴260a的中心线为轴相对转动。其中,为了描述方便,将销轴260的中心线所在直线确定为y轴,将垂直于y轴并经过镜托240a几何中心点的直线确定x轴(参考图5所示的x轴和y轴),扫描振镜200a上设置有两个弹性构件230a,并且两个弹性构件230a关于y轴对称设置,弹性构件230a本身为轴对称结构,例如参考图5所示的弹性构件230a的设置位置,弹性构件230a的对称轴与x轴在同一直线上。
70.可以理解,反射镜210a与镜托211a之间的相接方式可以采用胶黏等方式相接;弹性构件230a与镜托211a之间可以采用固定连接(例如焊接)或一体成型等方式相接;弹性构件230a与动件220a之间也可以采用固定连接(例如焊接)或一体成型等方式相接,在此不做限制。
71.图6所示为本技术实施例提供的扫描振镜200a的爆炸结构示意图。
72.图6所示,扫描振镜200a还包括磁石250a,磁石250a固定于镜托240a的下表面,基座270a包括271a、272a和273a三部分,三个基座部分271a、272a和273a通过螺钉固定连接;安装时,扫描振镜200a的基座270a可以通过螺钉等紧固件与塑胶板110a的四个角部位固定;基座270a上还固定设置有用于检测反射镜210a实时位置的传感器板290a,传感器板290a例如可以胶黏固定在基座270a上;传感器板290a与线圈280a通过飞线120a连接,传感器板290a通过柔性电路板(flexible printed circuit,fpc)连接外部驱动电源。其中,线圈280a缠绕在塑胶板110a上,线圈280a包括高频线圈281a和低频线圈282a,且高频线圈
281a和低频线圈282a的缠绕方向相互垂直,与磁石250a相互作用形成电磁力驱动反射镜210a旋转。
73.可以理解,为了使高频线圈281a和低频线圈282a通电时所产生的电磁力相互垂直,高频线圈281a和低频线圈282a分别绕塑胶板110a的缠绕方式可以参考图7所示,高频线圈281a和低频线圈282a的缠绕方向所在平面相互垂直。
74.结合上述图5至图7,扫描振镜200a工作时,一方面,外部驱动电源通过fpc、传感器板290a以及飞线120a在高频线圈281a中通250hz的高频交变电流,高频线圈281a通电产生的电磁力与磁石250a相互作用,产生作用力与反作用力,使得磁石250a带动镜托240a、反射镜210a以及连接镜托240a与动件220a的弹性构件230a绕x轴旋转,其中,交变电流250hz为动件220a、弹性构件230a、镜托240a及反射镜210a、磁石250a组合结构的固有频率,因此绕x轴的旋转运动为高频谐振运动,实现激光雷达的水平扫描功能。另一方面,外部驱动电源通过传感器板290a和飞线120a在低频线圈282a中通10hz低频交变电流,低频线圈282a通电产生的电磁力与磁石250a相互作用,产生作用力与反作用力,使得磁石250a带动镜托240a、反射镜210a和动件220a绕y轴旋转,实现激光雷达的垂直扫描功能。
75.在扫描振镜200a的上述工作过程中,如上所述,扫描振镜200a中绕x轴旋转的镜托240a、反射镜210a以及弹性构件230a为高频谐振结构,其中弹性构件230a为转动过程中的应力集中部分,弹性构件230a的结构对于反射镜210a绕x轴实现较大的旋转角度以及对于扫描振镜200a的寿命提高至关重要。可以理解,提高弹性构件230a的弹性能够在一定程度上分散弹性构件230a上的应力集中,但也容易引起反射镜210a的谐振频率降低,因此提高弹性构件230a弹性的同时还需要保障反射镜210a的固有谐振频率。
76.继续参考图5所示,本技术所提供的弹性构件230a的结构能够保障在固有谐振频率(250hz)下工作的情况下,提高弹性构件230a弹性以降低应力并增大激光扫描角度,提高扫描振镜200a的适应性,使扫描振镜200a能够用于需要更大激光扫描角度要求的场景中,另一方面,本技术的扫描振镜200a能够在许多自动驾驶等应用场景中替代原有的仅能实现较小角度偏转的扫描振镜,减少汽车上安装的激光雷达的数量,在一定程度上节约成本。
77.下面结合附图详细介绍本技术的扫描振镜200a中所采用的弹性构件230a的具体结构。
78.图8所示为本技术实施例提供的弹性构件230a的一种实施方式的结构示意图。
79.如图8所示,弹性构件230a包括1个直线段801以及2个弯折段802和803,直线段801的一个自由端形成一个连接端801p;弯折段802和803关于直线段801的中心线所在直线(也是图8所示x轴所在直线)对称,弯折段802和803的一端与直线段801的另一个自由端相交于x轴上任一点处,弯折段802和803的另一端分别形成连接端802p和803p。如图8所示,弯折段802和803上形成的连接端802p和803p的部分垂直于x轴并反向延伸。可以理解,直线段801与弯折段802和803可以按照图8所示的结构一体成型或固定连接,形成弹性构件230a,在此不做限制。
80.可以理解,在弹性构件230a与上述反射镜210a和动件220a相接的状态下,图8所示弹性构件230a的对称轴与图5所示的x轴在同一直线上。其中,弹性构件230a与上述反射镜210a和动件220a的相接方式,可以是连接端801p与固定有反射镜210a的镜托240a相接、连接端802p和803p均与动件220a相接,其中连接端801p位于x轴上、连接端802p和803p关于x
轴对称,参考上述图5所示。在另一实施例中,弹性构件230a与上述镜托240a和动件220的相接方式,还可以是连接端801p与动件220a相接,802p和803p与镜托240a相接,在此不做限制。其中,连接端801p在x轴上、连接端802p和803p关于x轴对称,在此不做限制。
81.可以理解,在另一些实施例中,具有三个连接端的弹性构件230a的结构还可以是其他形式,例如图9a至图9d所示的结构形式,在此不做限制。
82.可以理解,弹性构件230a在与上述镜托240a和动件220a相接时,其结构应当适应图5所示的镜托240a和动件220a之间的可安装空间,在此不再赘述。
83.本技术实施例所采用的弹性构件230a,与镜托240a和动件220a相连处形成3个连接端,当扫描振镜200a工作时,一方面弹性构件230a能够通过各弯折段缓冲一部分应力,降低反射镜210a和镜托240a相对于动件220a绕x轴相对旋转的应力水平并且能够保障较大的旋转角度;另一方面,弹性构件230a与镜托240a和动件220a通过3个连接端相连,又能够确保反射镜210a和镜托240a在足够的应力作用下相对于动件220a绕x轴保持高频旋转,也就是说,本技术实施例所采用的弹性构件230a既能适应较高谐振频率条件、又能保证较大旋转角度,并有效降低应力水平,提高扫描振镜200a的使用寿命。另外,弹性构件的对称结构设计能够有效地消除其他轴向的旋转分量,利于提高扫描振镜200a的控制精度。
84.实施例2
85.本技术实施例2通过介绍扫描振镜上采用改进后的弹性构件230b实现激光雷达水平扫描功能的原理及过程。
86.本技术实施例2所提供的扫描振镜的结构与上述实施例1中扫描振镜的结构基本相同,在此不再赘述。其不同之处在于,所采用的弹性构件的结构不同,下面结合附图介绍本技术实施例中弹性构件的具体结构。
87.图10所示为本技术实施例提供的弹性构件230b的一种实施方式的结构示意图。
88.如图10所示,弹性构件230b包括1个直线段1001以及4个弯折段1002、1003、1004和1005,直线段1001的一个自由端形成一个连接端1001p;弯折段1002和1003、弯折段1004和1005分别关于直线段1001的中心线所在直线对称;弯折段1002和1003的一端与直线段1001的另一个自由端相交于x轴上,弯折段1002和1003的另一端分别形成连接端1002p和1003p;弯折段1004和1005的一端相交于直线段1001两端之间的任一点上(该点也在x轴上),另一端形成连接端1004p和1005p。可以理解,弯折段1002、1003、1004和1005以及直线段1001可以按照图10所示的结构一体成型或固定连接,形成弹性构件230b,在此不做限制。
89.可以理解,在弹性构件230b与上述镜托和动件相接的状态下,图10所示弹性构件230b的对称轴即在上述图5所示的x轴上。参考上述图5所示的弹性构件230a的设置位置,弹性构件230b与镜托和动件之间的相接方式,可以是连接端1001p与固定有反射镜的镜托相接、连接端1002p、1003p、1004p和1005p均与动件相接,其中连接端1001p位于x轴上、连接端1002p和1003p关于x轴对称、连接端1004p和1005p关于x轴对称。在另一实施例中,弹性构件230b与上述镜托和动件的相接方式,还可以是连接端1001p与动件相接、连接端1002p、1003p、1004p和1005p均与镜托相接,在此不做限制。其中,连接端1001p位于x轴上、连接端1002p和1003p关于x轴对称、连接端1004p和1005p关于x轴对称。
90.可以理解,在另一些实施例中,具有5个连接端的弹性构件230b的结构还可以是其他形式,例如图11a至11c所示的结构形式,在此不做限制。在另一些实施例中,弹性构件
230b还可以是参考图10或图11a至11c所示结构的变形结构,形成5个以上的其他奇数个连接端,在此不做限制。
91.可以理解,在另一些实施例中,弹性构件230b可以由4个弯折段1002、1003、1004和1005以及1个直线段1001构成,其中,弯折段1002、1003的一端相交于直线段1001的一端,弯折段1002、1003的另一端形成两个连接端;弯折段1004、1005的一端相交于直线段1001的另一端,弯折段1004、1005的另一端形成另外两个连接端。即,该弹性构件230b具有4个连接端,参考图11d所示。在另一些实施例中,弹性构件230b还可以是参考图11d所示结构的变形结构,形成4个以上的其他偶数个连接端,在此不做限制。
92.可以理解,弹性构件230b在与上述镜托和动件相接时,其结构应当适应上述图5所示的镜托和动件之间的可安装空间,在此不再赘述。
93.本技术实施例所采用的弹性构件与镜托和动件相连处形成5个连接端,当扫描振镜工作时,一方面弹性构件能够通过各弯折段缓冲一部分应力,降低反射镜和镜托相对于动件绕x轴相对旋转的应力水平并且能够保障较大的旋转角度;另一方面,弹性构件与镜托和动件通过5个连接端相连,又能够确保反射镜和镜托在足够的应力作用下相对于动件绕x轴保持高频旋转,也就是说,本技术实施例所采用的弹性构件既能适应较高谐振频率条件、又能保证较大旋转角度,并有效降低应力水平,提高扫描振镜的使用寿命。另外,弹性构件的对称结构设计能够有效地消除其他轴向的旋转分量,利于提高扫描振镜的控制精度。
94.实施例3
95.本技术实施例3通过介绍扫描振镜上采用改进后的弹性构件230c实现激光雷达水平扫描功能的原理及过程。
96.本技术实施例所提供扫描振镜与上述实施例1中扫描振镜的结构基本相同,在此不再赘述。其不同之处在于,本技术实施例的扫描振镜所采用的弹性构件结构不同,下面结合附图详细说明本技术实施例的弹性构件的具体结构。
97.图12所示为本技术提供的弹性构件230c的一种实施方式的结构示意图。
98.如图12所示,弹性构件230c包括2个弯折段1201和1202,2个弯折段1201的一端相交于x轴上形成一个连接端1201p,2个弯折段1201的两端分别形成连接端1202p和1203p,连接端1202p和1203p关于x轴对称,弹性构件230c的对称轴在图12所示的x轴上。
99.如图12所示,弹性构件230具有3个连接端1201p、1202p和1203p。在弹性构件230c与上述镜托和动件相接的状态下,图12所示弹性构件230c的对称轴即在上述图5所示的x轴上。参考上述图5所示的弹性构件230a的设置位置,弹性构件230c与镜托和动件之间的相接方式,可以是连接端1201p与固定有反射镜的镜托相接、连接端1202p和1203p均与动件相接,或者连接端1201p与动件相接、连接端1202p和1203p均与镜托相接,在此不做限制。其中,连接端1201p位于x轴上。
100.可以理解,弹性构件230c在与上述镜托和动件相接时,其结构应当适应上述图5所示的镜托和动件之间的可安装空间,在此不再赘述。
101.本技术实施例所采用的弹性构件,与镜托和动件相连处形成3个连接端,当扫描振镜工作时,一方面弹性构件能够通过各弯折段缓冲一部分应力,降低反射镜和镜托相对于动件绕x轴相对旋转的应力水平并且能够保障较大的旋转角度;另一方面,弹性构件与镜托和动件通过3个连接端相连,又能够确保反射镜和镜托在足够的应力作用下相对于动件x轴
保持高频旋转,也就是说,本技术实施例所采用的弹性构件既能适应较高谐振频率条件、又能保证较大旋转角度,并有效降低应力水平,提高扫描振镜的使用寿命。另外,弹性构件的对称结构设计能够有效地消除其他轴向的旋转分量,利于提高扫描振镜的控制精度。
102.在说明书对“一个实施例”或“实施例”的引用意指结合实施例所描述的具体特征、结构或特性被包括在根据本技术公开的至少一个范例实施方案或技术中。说明书中的各个地方的短语“在一个实施例中”的出现不一定全部指代同一个实施例。
103.另外,在本说明书所使用的语言已经主要被选择用于可读性和指导性的目的并且可能未被选择为描绘或限制所公开的主题。因此,本技术公开旨在说明而非限制本文所讨论的概念的范围。
104.可以理解的是,此处描述的具体实施例仅仅是为了解释本技术,而非对本技术的限定。此外,为了便于描述,附图中仅示出了与本技术相关的部分而非全部的结构或过程。应注意的是,在本说明书中,相似的标号和字母在下面的附图中表示类似项。因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
105.在本技术的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相接”、“连接”应做广义理解,例如,可以是固定焊接,也可以是可拆卸连接,或一体成型连接;可以是机械连接,也可以是电连接;可以是直接相接,也可以通过中间媒介间接相接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1