金属支架快速检验装置的制作方法
1.本实用新型涉及一种检验装置,尤其涉及对作为支架使用的框架式结构产品进行检验的装置。
背景技术:
2.很多金属产品并非是一体式加工而成,还会采用焊接拼接等方式制造而成,这种制造类型的金属产品中以各种底座、支架、机架类连接件为主,而框架结构是重量轻且强度符合要求,因此这种金属产品又常采用框架结构。此类产品加工难度不高,利润也低于机床加工品的一体式金属产品,故而从事者较少,但此类产品在众多机械设备中可以看做一种低成本却有效的解决方案,是不可或缺的,因此客户需求量巨大。生产此类金属焊接拼接类产品是由专门的焊接车间进行,在焊接加工过程中焊工需要根据参数尺寸要求进行加工,存在两种检验工作的流程,其一是在加工时需要边焊接边测量,确保各框架能够保持一致的尺寸,这样能大大减少完工时的工作失误,增加良品率,但缺点是工作效率降低,来回检测很繁琐;其二是在完成一件产品的全部加工工作后再统一进行检测,有点是加工效率高,缺点是一旦出现例如歪曲、倾斜、不平整而导致不符合产品参数的问题,便需要重新切割焊接,降低了良品率也降低的工作效率。为解决问题通常需要通过增加人手或者招聘薪资更高的熟练焊工,但目前招工比较困难,解决上述问题还没有好的方案。
技术实现要素:
3.为解决上述技术问题,提供了金属支架快速检验装置,所提供的技术方案如下,包括有工作台,还包括有两个相互并列布置的检验组件,检验组件包括电动滑轨、电机、可伸缩机构a、测距机构,电动滑轨固定在工作台底部,电机和可伸缩机构a安装在滑轨的滑块上,其中可伸缩机构a通过铰接件与滑块摆动连接,电机通过传动轴驱动可伸缩机构a进行摆动,测距机构包括有激光测距传感器和安装有该传感器的连接板,可伸缩机构a的摆动、伸出动作能带动激光测距传感器运动到工作台上方,并通过电动滑轨在工作台上滑动,两个检验组件分别检测工作台的左、右两侧。
4.在上述技术方案的基础上,还包括有可伸缩机构b,可伸缩机构b固定在连接板上,激光测距传感器连接在可伸缩机构b上并受其驱动进行升降。
5.在上述技术方案的基础上,测距机构还包括有滑动板,连接板与滑动板滑动连接,激光测距传感器固定在滑动板的顶端,滑动板的底端与可伸缩机构b连接。
6.在上述技术方案的基础上,测距机构还包括有摇摆部,摇摆部包括有固定在滑动板顶端的水平底座、位于水平底座上的容纳盒,容纳盒通过转轴在水平底座上自转,容纳盒顶部和正面开放,激光测距传感器一部分位于容纳盒内并从容纳盒开放的开口向外探测,激光测距传感器还通过铰接件在容纳盒内进行纵向摆动。
7.在上述技术方案的基础上,工作台侧壁上设置有缓冲垫,对连接板施加在其上的力进行缓冲。
8.有益效果:利用激光测距传感器以及与其配套的成熟软硬件搭建起快速检验方案,通过激光测距传感器从两侧向支架进行测距,通过对得到的距离信息进行计算分析,能够间接获知该支架两侧是否处于平行状态。激光测距传感器能够在沿工作台台面进行滑动,仅需将待检验的产品放置在工作台上即可进行检验。不使用时还可通过伸缩转动回到工作平台底部收纳,能够适配在多种宽度、高度的工作台上。
9.还具有激光测距传感器可升降以及其自身可摆动的方案,很好的增强了的实用性。
附图说明
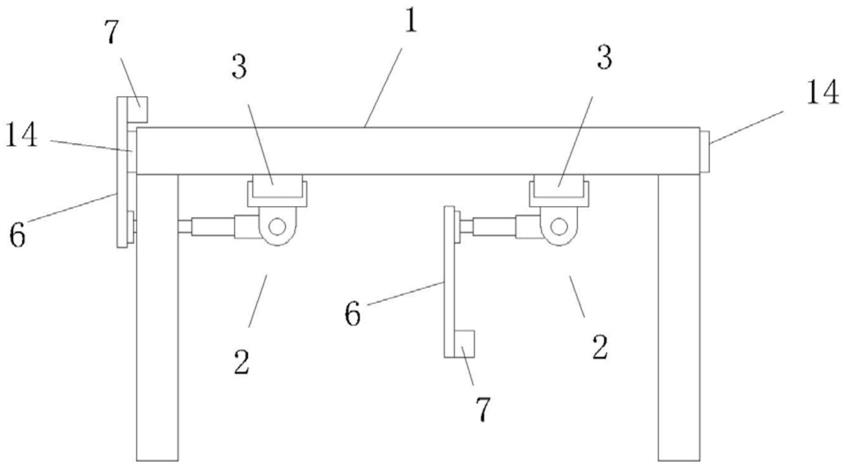
10.图1为本实用新型的侧视示意图。
11.图2为本实用新型的主视局部放大结构示意图。
12.图3为本实用新型的检验组件的使用状态的侧视示意图。
13.图4为本实用新型的图3的局部放大剖面示意图。
14.图5为本实用新型的第二实施例的侧视结构示意图。
15.图6为本实用新型的第二实施例的滑动板的侧视结构示意图。
16.图7为本实用新型的图6的主视结构示意图。
17.图8为本实用新型的第三实施例的摇摆部的剖面结构示意图。
18.图9为本实用新型的检测分析原理的示意图。
具体实施方式
19.实施例一。
20.本实施例提供一种检验装置,是将激光焊接传感器7与焊接工作台1相结合的方案。
21.本实施例使用方法如下,1.当产品加工完毕后,启动电机4带动可伸缩机构a5转动,将连接板6和激光测距传感器7从工作台1底部相对内侧转动到朝向工作台1外侧,须注意转动使避免激光测距传感器7磕碰到工作台1;
22.2.启动可伸缩机构a5,带动连接板6伸出,当连接板6完全从工作台1下方伸出时停止;
23.3.再次启动电机4,带动激光测距传感器7从工作台1底部转动升起,同时可伸缩机构a5收缩带动连接板6朝向工作台1方向运动,当激光测距传感器7高于工作台1顶部平台时电机4停止,当连接板6接触工作台1侧壁时可伸缩机构a5停止收缩;
24.4.激光测距传感器7启动,测量其与工作台1上的产品之间的距离,电动滑轨3同时启动,带动激光传感器7沿着工作台1侧壁滑动,工作台1两边的激光测距传感器7将检测产品两侧距离数据示出,经过计算后可得知产品是否加工合格。
25.如图1所示,在本实施例中工作台1底部设置有两个检验组件2,在不使用时,从上述步骤4开始反向操作,使激光测距传感器7收纳进工作台1底部,即图1中为于右侧的检验组件2的状态。
26.本实施例所述的计算分析原理是可参照图9,图9中金属支架12产品可随意平躺在工作台1上,激光测距传感器7处于步骤4状态。两侧的激光测距传感器7移动路径是从a至c、
从d至f,其中a点、b点、c点为右侧激光测距传感器7的三个测距检测点,仅需检测产品两侧数个点,而无需对其侧壁完全进行检测便足以获得需要的数据。
27.同理d至f为左侧的检测点,两个激光测距传感器7必须处于同一轴线上且需要同步一定,相应的其中相对的a与d、b与e、d与f点也应处于同轴线上。
28.具体检测逻辑是,以检测点a和检测点d为例,右侧激光测距传感器7测量距离a点的距离为l1,左侧激光测距传感器7距离d点的距离为l2,最后计算l减去l1加l2之和便可得知a点至d点之间的横向间距,同理在得知b点至e点间距和c点至f点间距后,三个间距进行比对,若差值较小则可以接受为合格品,若差值较大则直接判断不合格产品,并将其从工作台1取下等待后续处理。当合格品数量和不合格品数量等于需要的总量时,检视不合格品是否值得再次加工处理,可以处理的则立即处理,不能处理的则直接报废并重新加工新的产品,如此既能避免边加工边检测的低效率,又能避免对所有产品进行统一检测时工作量过大的问题。
29.激光测距传感器7一般可连接电脑,将数据通过厂家附带的自动化软件呈现在电脑上,同时可预设计算程序,例如当获得上述l1和l2数据时,用l自动减去两者之和并得出间距,同时预设间距之间的公差,当三组间距或者数组间距误差大于预设公差后可进行警报提示。本实施例可作为做出基础方案,自身具备诸多改进潜力,因此还可进行更多的自动化改进。
30.在本实施例中,所谓并列布置是以电动滑轨3轨道方向为依据,由于两个检验组件2的滑轨处于并列状态因此两组件应判断为整体上也处于并列状态。驱动激光测距传感器7的动作有三个,其一是电机4带动可伸缩机构自转,使得激光测距传感器7以电机4为中心摆动;其二是可伸缩机构a5伸缩运动,带动激光测距传感器7做靠近/远离工作台1的运动;其三是电动滑轨3带动激光测距传感器7水平方向滑动。为降低设计难度,默认当可伸缩机构a5处于水平状态时,激光测距传感器7检测的激光波束与工作台1顶部表面平行,此时检测距离是最短距离。
31.本实施例可提供优选例,出于激光测距传感器7稳定工作的需要,连接板6在电机4带动下需与工作台1接触,理论上可设置减速机构避免两者撞击,但为节省成本优选采用能够缓冲冲击力的缓冲垫14,缓冲垫14设置在工作台1侧壁,呈长条状。同时由于传感器7测距的需要,连接板6在电动滑轨3的带动下沿着工作台1滑动,使两者产生摩擦,而缓冲垫14可采用低摩擦力的材质,以降低摩擦力。缓冲垫14材质不限,可采用任何可行的方案,例如采用涤纶织物材质,将其粘合在工作台1上即可。
32.实施例二。
33.提供了激光测距传感器7可升降的方案,在第一实施例的基础上实现。
34.在本实施例中,将激光测距传感器7与连接板6脱离,并固定在可伸缩机构b8上,由其带动激光测距传感器7沿着连接板6进行升降。在不缩短连接板6尺寸的情况下,可降低激光测距传感器7高度,使其低于连接板6高度,从而使连接板6在摆动时,该传感器7能够处于安全状态,避免磕碰到工作台1或者地面。由于激光测距传感器7价值较高,本实施例可使其或者较好的保护。同时还能够适应不同高度尺寸的产品,若需要检测的产品侧壁较高,可将该传感器7升高。
35.本实施例存在优选例,优选了使激光测距传感器7更稳定的升降方式,即在连接板
6上设置了可滑动的滑动板9,滑动板9紧贴连接板6,在可伸缩机构b8带动下沿着连接板6滑动,推动该传感器7升降。更进一步的可在滑动板9与连接板6上设置滑块轨道,例如将滑块设置在滑动板9上,在连接板6上开设供滑块滑动的轨道,进一步提升滑动板9滑动的稳定性。
36.本实施例还存在优选例,即在滑动板9顶部设置摇摆部10,摇摆部10的水平底座11固定在滑动板9顶部,为避免影响滑动板9和激光测距传感器7的下降运动,必要时水平底座11可固定在滑动板9顶部远离连接板6的边缘,必要时滑动板9可通过支架12辅助支撑水平底座11。如图8所示容纳盒13为常规盒体结构,容纳盒13的顶部和正面均相应开放,激光测距传感器7通过铰接件在容纳盒13内摆动,该摆动为纵向俯仰摆动。该传感器7可完全位于容纳盒13内,也可部分从容纳盒13伸出。由于激光测距传感器7可进行摆动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1