一种大气环境遥感监测系统的制作方法
1.本实用新型涉及大数据技术领域,尤其是一种大气环境遥感监测系统。
背景技术:
2.近年来,随着我国经济的发展和生活水平的提高,环境污染问题也越来越严重,尤其是大气品质状况越来越受到人们的关注。工业中煤和石油燃烧产生的大气污染物,工业企业生产过程中排放的大气污染物,汽车、火车、飞机、轮船等交通工具排放的大气污染物以及生活垃圾焚烧产生的大气污染物使得大气污染情况日益严重。
3.大气环境监测是对大气环境中污染物浓度观察、变化分析和环境影响测定的过程。大气污染监测是测定大气中污染物的种类及其浓度,并观察其时空分布和变化规律。大气环境监测中所监测的分子状污染物主要有硫氧化物、氮氧化物、一氧化碳、臭氧、卤代烃、碳氢化合物、可挥发性有机物(tvoc)等;颗粒状污染物主要有降尘、总悬浮微粒、飘尘及酸沉降。中国在《大气环境质量标准》中,只对总悬浮微粒、飘尘、二氧化硫、氮氧化物、一氧化碳和光化学氧化剂六个项目的限值作了规定,其中飘尘作为参考标准;实际上,在大气环境监测中,总悬浮微粒、二氧化硫、氮氧化物三项是必测项目,其他项目可以根据各区域大气污染的不同特点,增加碳氢化合物、总氧化剂、可吸入颗粒物、二氧化氮、氟化物、铅等特征污染物的监测。
4.目前,国内无人机技术得到了长足的发展和技术的飞跃,国内的无人机在升限、载荷、飞行速度等技术方面都有了质的飞跃,无人机被广泛应用在大气环境遥感监测系统中。然而,现有无人机所搭载的监测传感器通常布置在无人机壳体内,多种不同的监测传感器排布在电路板上,通过壳体上设置的通风孔或通风格栅实现进风,在监测过程中不仅进风量小,而且进风存在时间和空间上的样品混合与延迟,导致测量的数据不科学、不准确和不可靠等问题,而且部分无人飞机因电力因素,无法长时间持续检测,实用性较低,不方便人们的使用。
技术实现要素:
5.本实用新型的目的在于针对现有技术的不足,提供一种设计合理,监测持续时间长,能够实现传感器与大气直接接触,监测数据可靠性好、准确性高的大气环境遥感监测系统。
6.为了实现上述目的,本实用新型采用以下技术方案:
7.一种大气环境遥感监测系统,其包括无人机本体和地面监控终端,所述无人机本体上安装有微处理器、无线通讯模块和用于监测空气质量的传感器组件,传感器组件与微处理器连接,微处理器通过无线通讯模块与地面监控终端连接,所述无人机本体内设有监测舱、驱动器和电源模块,所述监测舱底部设有与外界大气连通的舱口,舱口处设有可启闭舱口的舱门,传感器组件固定安装在舱门内侧,所述驱动器与微处理器连接,驱动器的输出轴与舱门固定连接用于带动舱门及传感器组件升降,所述电源模块分别与微处理器、无线
通讯模块、传感器组件和驱动器连接。
8.进一步,所述舱门内侧可拆卸连接有罩设在传感器组件外的过滤网罩。该设计使其能够过滤空气中较大的杂质,防止杂质污染传感器组件,同时还能够对传感器组件起到防护作用。
9.进一步,所述监测舱内设有用于带动舱门复位的复位弹簧。该设计使其能够通过复位弹簧带动下降开启的舱门进行上升复位,从而减少驱动器耗电。
10.进一步,所述无人机本体底部两侧均对应设有缓冲筒和支撑脚架,缓冲筒上端固定在无人机本体底部,缓冲筒内固定有缓冲弹簧,缓冲弹簧滑动套设在缓冲筒内的支撑脚架上端连接。该设计使其能够在无人机本体降落时起到缓冲作用,提高降落稳定性,从而避免无人机本体上搭载的各电子元器件在起落时受到较大冲击,有效提高设备的使用寿命。
11.进一步,所述无人机本体顶部设有定位模块,定位模块用于实时获取无人机本体位置信息并通过无线通讯模块与地面监控终端连接。该设计使其能够实时生成无人机本体飞行轨迹,以便及时核对或掌握无人机本体的位置信息,有利于提高数据采集准确性。
12.作为优选,所述定位模块包括北斗定位器、gps定位器、glonass定位器和galileo定位器中的一种以上。
13.进一步,所述无人机本体顶部外侧固定有太阳能光伏板,所述电源模块包括可充电蓄电池和电池管理模块,可充电蓄电池的输入端与太阳能光伏板连接,可充电蓄电池通过电池管理模块与微处理器连接。该设计利用了现有技术中成熟的太阳能充电技术为无人机本体上搭载的可充电蓄电池进行充电,使其能够对可充电蓄电池进行电能补充,延长其供电时间,从而延长监测作业时间。
14.进一步,所述无人机本体前部设有用于采集周围环境视频信息的摄像头,摄像头与微处理器连接。该设计使其能够通过摄像头实时观察无人机本体周围环境,以便及时调整飞行,并能够拍摄记录目标区域气体排放情况,以便为后续数据分析提供数据支持。
15.作为优选,所述传感器组件至少包括pm
2.5
传感器、pm
10
传感器、so2传感器、no
x
传感器、o3传感器和co传感器。
16.作为优选,所述驱动器为伸缩缸。所述微处理器采用msp430f67471a单片机或者stm8s105k4单片机。
17.本实用新型采用以上技术方案,无人机本体按照预设航线飞行至目标区域,控制无人机本体悬停在目标高度,微处理器控制驱动器伸长,带动舱门下降开启舱口,并带动位于舱门内侧的传感器组件下降离开监测舱,从而使得传感器组件与外界大气直接接触,微处理器控制传感器组件启动,开始对空气中的污染物和颗粒物等进行感应,以获得监测数据发送给微处理器,微处理器通过其传感器接口接收传感器组件的各传感器原始数据,进行数据校验、处理、记录后,通过无线通讯模块发送给地面监控终端,从而完成数据采集;采集完成后,微处理器控制驱动器收缩,带动舱门上升封闭舱口,并带动传感器组件上升收纳于监测舱内,然后微处理器根据地面监控终端发来指令控制无人机本体继续飞行至下个目标区域进行数据采集或者返航。本实用新型电源模块的设计,使其能够为无人机本体飞行、微处理器、无线通讯模块、传感器组件和驱动器的工作提供电力支持。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
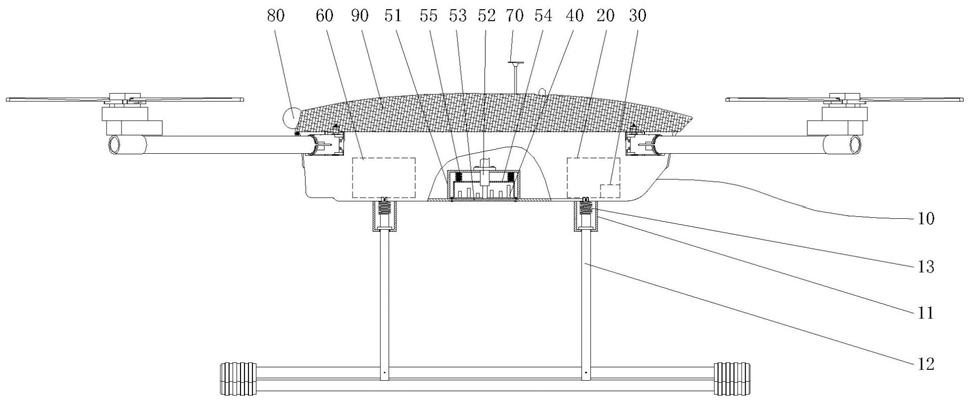
19.图1为本实用新型大气环境遥感监测系统的一种状态结构示意图;
20.图2为本实用新型大气环境遥感监测系统的另一种状态结构示意图;
21.图3为本实用新型大气环境遥感监测系统的原理框图。
具体实施方式
22.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本实用新型相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实用新型的一些方面相一致的装置和方法的例子。
23.图1-3之一所示,本实用新型的大气环境遥感监测系统,其包括无人机本体10和地面监控终端,所述无人机本体10上安装有微处理器20、无线通讯模块30和用于监测空气质量的传感器组件40,传感器组件40与微处理器20连接,微处理器20通过无线通讯模块30与地面监控终端连接,所述无人机本体10内设有监测舱51、驱动器52和电源模块60,所述监测舱51底部设有与外界大气连通的舱口,舱口处设有可启闭舱口的舱门53,传感器组件40固定安装在舱门53内侧,所述驱动器52与微处理器20连接,驱动器52的输出轴与舱门53固定连接用于带动舱门53及传感器组件40升降,所述电源模块60分别与微处理器20、无线通讯模块30、传感器组件40和驱动器52连接。
24.进一步,所述舱门53内侧可拆卸连接有罩设在传感器组件40外的过滤网罩54。该设计使其能够过滤空气中较大的杂质,防止杂质污染传感器组件40,同时还能够对传感器组件40起到防护作用。
25.进一步,所述监测舱51内设有用于带动舱门53复位的复位弹簧55。该设计使其能够通过复位弹簧55带动下降开启的舱门53进行上升复位,从而减少驱动器52耗电。
26.作为优选,所述复位弹簧55两端分别与监测舱51和过滤网罩54连接。
27.进一步,所述无人机本体10底部两侧均对应设有缓冲筒11和支撑脚架12,缓冲筒11上端固定在无人机本体10底部,缓冲筒11内固定有缓冲弹簧13,缓冲弹簧13滑动套设在缓冲筒11内的支撑脚架12上端连接。该设计使其能够在无人机本体10降落时起到缓冲作用,提高降落稳定性,从而避免无人机本体10上搭载的各电子元器件在起落时受到较大冲击,有效提高设备的使用寿命。
28.进一步,所述无人机本体10顶部设有定位模块70,定位模块70用于实时获取无人机本体10位置信息并通过无线通讯模块30与地面监控终端连接。该设计使其能够实时生成无人机本体10飞行轨迹,以便及时核对或掌握无人机本体10的位置信息,有利于提高数据采集准确性。
29.作为优选,所述定位模块70包括北斗定位器、gps定位器、glonass定位器和galileo定位器中的一种以上。
30.进一步,所述无人机本体10顶部外侧固定有太阳能光伏板90,所述电源模块60包括可充电蓄电池和电池管理模块,可充电蓄电池的输入端与太阳能光伏板90连接,可充电蓄电池通过电池管理模块与微处理器20连接。该设计利用了现有技术中成熟的太阳能充电技术为无人机本体10上搭载的可充电蓄电池进行充电,使其能够对可充电蓄电池进行电能补充,延长其供电时间,从而延长监测作业时间。
31.进一步,所述无人机本体10前部设有用于采集周围环境视频信息的摄像头80,摄像头80与微处理器20连接。该设计使其能够通过摄像头80实时观察无人机本体10周围环境,以便及时调整飞行,并能够拍摄记录目标区域气体排放情况,以便为后续数据分析提供数据支持。
32.作为优选,所述传感器组件40至少包括pm
2.5
传感器、pm
10
传感器、so2传感器、no
x
传感器、o3传感器和co传感器。
33.作为优选,所述驱动器52为伸缩缸。所述微处理器20采用msp430f67471a单片机或者stm8s105k4单片机。
34.本实用新型采用以上技术方案,无人机本体10按照预设航线飞行至目标区域,控制无人机本体10悬停在目标高度,微处理器20控制驱动器52伸长,带动舱门53下降开启舱口,并带动位于舱门53内侧的传感器组件40下降离开监测舱51,从而使得传感器组件40与外界大气直接接触,微处理器20控制传感器组件40启动,开始对空气中的污染物和颗粒物等进行感应,以获得监测数据发送给微处理器20,微处理器20通过其传感器接口接收传感器组件40的各传感器原始数据,进行数据校验、处理、记录后,通过无线通讯模块30发送给地面监控终端,从而完成数据采集;采集完成后,微处理器20控制驱动器52收缩,带动舱门53上升封闭舱口,并带动传感器组件40上升收纳于监测舱51内,然后微处理器20根据地面监控终端发来指令控制无人机本体10继续飞行至下个目标区域进行数据采集或者返航。本实用新型电源模块60的设计,使其能够为无人机本体10飞行、微处理器20、无线通讯模块30、传感器组件40和驱动器52的工作提供电力支持。
35.以上所述为本实用新型的较佳具体实施例,应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验所做的均等变化、修改、替换和变型,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1