大型望远镜驱动系统故障仿真装置
1.本实用新型属于驱动系统故障诊断领域。
背景技术:
2.计算机、主动光学、自动控制、新材料和精密机械等领域诸多新技术的出现,使得天文望远镜从简单机械结构、手控发展成为由计算机控制的集光机电设备于一身的大型设备。大型望远镜设备庞大,故障屡见不鲜,常年工作在高原荒漠等苦寒地区,且由于路途遥远交通不便,人力检修费时费力效率低下。因此,望远镜的控制系统需具备故障诊断功能。故障诊断需要先验数据,而发生故障时控制系统会停机,导致先验数据量稀少。采用半实物仿真装置不仅可以及早发现系统设计的不足、缩短设计周期、减少试验成本、确定最佳控制策略,而且有助于新技术、新理论在望远镜控制系统中的应用和推广。
3.传统的望远镜故障模拟方案,总结特定工作环境的望远镜常见故障种类,模拟系统重现多种常见故障,用功率继电器16通道电路板来可视化展示故障的发生,继电器板上16路信号对应16种先验故障,故障发生时,相应继电器吸合且对应指示灯亮。这种方案虽然在仿真回路中有实物存在,但并非是真实的望远镜设备,与实际情况存在较大出入,也无法模拟非预期故障。
4.而人工施加负载以模拟故障的方法,在回路中添加了真实的望远镜驱动力矩电机,模拟的故障数据比较接近真实情况,但需要人工以扳手旋紧螺杆,通过压力传感器仪表盘读数来判断所加负载扰动的力,这种方法费时费力,对微小负载变化不能很好地模拟,也无法模拟各种连续故障信号、算法,不能短时间内获取大量故障数据。
技术实现要素:
5.本实用新型的目的:为了解决上述现有技术存在的问题,本实用新型提供了一种大型望远镜驱动系统故障仿真装置。
6.本实用新型的技术方案:本实用新型提供了一种大型望远镜驱动系统故障仿真装置,包括:工控机,power pmac运动控制器、信号放大器、24v直流电源、压力传感器、步进电机、步进电机驱动器、滚珠螺杆、转台圆盘、联轴器、接头和转台力矩电机;所述工控机和power pmac运动控制器连接,所述power pmac运动控制器内设有数模转换模块;所述power pmac运动控制器与步进电机驱动器连接,所述步进电机驱动器与24v直流电源以及步进电机的输入端连接,所述滚珠螺杆通过联轴器与步进电机连接,所述步进电机的中心轴承的前端与压力传感器连接,所述压力传感器的输入端与接头连接,所述接头与转台圆盘的侧面接触,所述压力传感器的输出端连接信号放大器,所述信号放大器与power pmac运动控制器中的数模转换模块连接;所述转台力矩电机设置在转台圆盘的底部。
7.进一步的,所述转台圆盘为金属圆盘。
8.进一步的,所述接头的材料采用聚四氟乙烯。
9.进一步的,所述power pmac运动控制器与步进电机驱动器之间通过工业以太网连
接。
10.有益效果:本实用新型的结构简单,操作便利,能够有效的实现故障运行过程中的数据采集,对故障的仿真也较为真实,使得得到的故障数据也接近真实,便于后续的故障分析。
附图说明
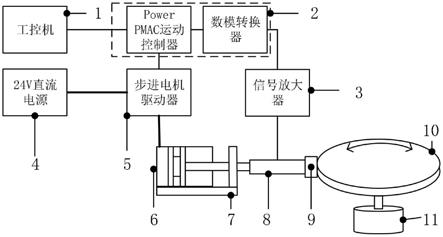
11.图1为本实用新型的整体结构图。
12.图2为本实用新型的闭环运行原理框图。
13.图3为本实用新型的运行流程图。
14.附图说明:1、工控机;2、power pmac运动控制器;3、信号放大器;4、24v直流电源;5、步进电机驱动器;6、步进电机;7、滚珠螺杆;8、压力传感器;9、接头;10、转台圆盘;11、转台力矩电机。
具体实施方式
15.以下结合附图对本实用新型作进一步详细说明。
16.如图1所示,本实施例提供了一种大型望远镜驱动系统故障仿真装置,包括:工控机1,power pmac运动控制器2、信号放大器3、24v直流电源4、压力传感器8、步进电机6、步进电机驱动器5、滚珠螺杆7、转台圆盘10、联轴器、接头9和转台力矩电机11;所述转台圆盘用于模拟大型望远镜的转台。
17.所述工控机和power pmac运动控制器连接,所述power pmac运动控制器内设有数模转换模块;所述power pmac运动控制器与步进电机驱动器连接,所述步进电机驱动器与24v直流电源以及步进电机连接,用于控制步进电机运动,所述滚珠螺杆通过联轴器与步进电机连接,用于将步进电机的旋转运动转换成直线传动,所述步进电机的中心轴承的前端与压力传感器连接,所述压力传感器还与接头连接,用于采集转台圆盘所收到的摩擦力,所述接头与转台圆盘的侧面接触,所述压力传感器的输出端连接信号放大器,所述信号放大器与power pmac运动控制器中的数模转换模块连接;所述转台力矩电机设置在转台圆盘的底部,用于控制转台圆盘转动。
18.本实施例中转台圆盘为金属圆盘。
19.所述压力传感器是经接头和金属圆盘摩擦读取步进电机通过螺杆和接头对转台施加的正压力。本实施例中接头采用聚四氟乙烯制作而成,由公式f=μn,可得对步进电机所加的力。其中,n表示正压力,即压力传感器的测量值,μ表示聚四氟乙烯与金属表面的滑动摩擦系数,f为实际加载到转台的摩擦力(也既步进电机受到的力)。该计算方式均为现有的计算方式。步进电机发出的力通过滚珠螺杆和接头施加到转台。
20.所述数模转换模块为16通道,压力传感器将采集到的压力数据通过信号放大器传送至数模转换模块,所述数模转换模块将收到的模拟量转换为数字量,并使用m1级砝码对压力传感器数字量进行校正拟合。
21.本实施例的工作流程如图2,3所示:通过工业以太网将步进电机驱动器与power pmac运动控制器连接,power pmac运动控制器通过步进电机驱动器控制步进电机作为模拟负载施加到转台圆盘上,从而通过步进电机实现各种线性与非线性的模拟负载(例如递增
负载、递增后稳定负载、波动负载等负载,用于模拟大型望远镜不同的故障),转台力矩电机控制转台圆盘转动,压力传感器同步采集转台圆盘所受到的力,并将该力作为采集到的故障数据(也就大型望远镜故障情况下转台所受压力的故障数据),压力传感器将采集到的数据通过信号放大器传送至数模转换模块,实现不同负载情况下(大型望远镜在不同故障下),转台圆盘的压力数据的采集。最后,数据读取完毕或达到设定的仿真时间后,结束数据采集工作,保存数据以供分析。
22.本实用新型采用的软件程序均为现有的技术,本实用新型并未对软件程序作出改进,本实用新型的改进仅结构或各器件之间的连接关系。
23.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
技术特征:
1.大型望远镜驱动系统故障仿真装置,其特征在于,包括:工控机,power pmac运动控制器、信号放大器、24v直流电源、压力传感器、步进电机、步进电机驱动器、滚珠螺杆、转台圆盘、接头和转台力矩电机;所述工控机和power pmac运动控制器连接,所述power pmac运动控制器内设有数模转换模块;所述power pmac运动控制器与步进电机驱动器连接,所述步进电机驱动器与24v直流电源连接,所述步进电机驱动器,滚珠螺杆以及压力传感器均与步进电机连接;所述压力传感器还与接头和信号放大器连接;所述接头与转台圆盘的侧面接触,所述信号放大器与power pmac运动控制器中的数模转换模块连接;所述转台力矩电机设置在转台圆盘的底部。2.根据权利要求1所述的大型望远镜驱动系统故障仿真装置,其特征在于,所述滚珠螺杆通过联轴器与步进电机连接。3.根据权利要求1所述的大型望远镜驱动系统故障仿真装置,其特征在于,所述转台圆盘为金属圆盘。4.根据权利要求1所述的大型望远镜驱动系统故障仿真装置,其特征在于,所述接头的材料采用聚四氟乙烯。5.根据权利要求1所述的大型望远镜驱动系统故障仿真装置,其特征在于,所述power pmac运动控制器与步进电机驱动器之间通过工业以太网连接。
技术总结
本实用新型公开了一种大型望远镜驱动系统故障仿真装置,包括:工控机,所述工控机和PowerPMAC运动控制器连接,PowerPMAC运动控制器内设有数模转换模块;PowerPMAC运动控制器与步进电机驱动器连接,步进电机驱动器与24V直流电源以及步进电机连接,所述滚珠螺杆和压力传感器均与步进电机连接,所述压力传感器与接头和信号放大器连接,信号放大器与PowerPMAC运动控制器中的数模转换模块连接;转台力矩电机设置在转台圆盘的底部。本实用新型结构简单,操作便利。操作便利。操作便利。
技术研发人员:贾周 高志文 杨世海 彭思洋 邓壮壮
受保护的技术使用者:南京信息工程大学
技术研发日:2021.07.26
技术公布日:2022/1/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1