瞬变电磁超前地质预报的线圈角度控制装置的制作方法
1.本实用新型涉及超前地质预报技术领域,尤其涉及一种瞬变电磁超前地质预报的线圈角度控制装置。
背景技术:
2.超前地质预报是在隧道或底下工程开挖时,对掌子面前方及其周边的围岩与地层情况做出超前预报。其中,瞬变电磁法(transient electromagnetic method,简称tem)是一种常用的隧道超前预报方法。
3.瞬变电磁法用于在隧道掘进过程中进行超前探测,预测掌子面前方一定范围内是否存在地下水。瞬变电磁法主要利用瞬变电磁线圈进行电磁场信号的发射与接收,在超前预报的过程中,需要将瞬变电磁线圈按照一定角度,分别沿垂直方向和水平方向进行扫描探测,以探测隧道前方不同方向岩体中的含水分布情况。
4.在瞬变电磁隧道超前预报过程中,需要瞬变电磁线圈进行角度调整。目前在实际操作中,主要还是人为去控制瞬变电磁线圈的角度与方位,但是,利用人为凭感觉去控制扫描角度,误差一般非常大,影响原始数据的准确性,从而导致瞬变电磁超前地质预报的结果不准确,威胁着隧道施工安全。
技术实现要素:
5.本实用新型提供一种瞬变电磁超前地质预报的线圈角度控制装置,用以解决现有技术中人为去控制瞬变电磁线圈的角度与方位,误差一般非常大,影响原始数据的准确性,从而导致瞬变电磁超前地质预报的结果不准确的缺陷,实现提高瞬变电磁超前地质预报的结果准确性。
6.本实用新型提供一种瞬变电磁超前地质预报的线圈角度控制装置,包括:
7.支撑杆;
8.第一旋转部,所述第一旋转部绕第一转动轴可转动的设于所述支撑杆上,所述第一旋转部与所述支撑杆之间设有第一角度控制结构;
9.瞬变电磁线圈,所述瞬变电磁圈上设有连接杆;
10.第二旋转部,所述第二旋转部绕第二转动轴可转动的设于所述连接杆上,所述第一转动轴和所述第二转动轴垂直布置,所述第二旋转部与所述连接杆之间设有第二角度控制结构,所述第二旋转部与所述第一旋转部相连接。
11.根据本实用新型提供的一种瞬变电磁超前地质预报的线圈角度控制装置,所述第一角度控制结构包括第一角度盘和第一指针,所述第一角度盘和所述第一指针并列布置,所述第一转动轴穿过所述第一角度盘的圆心,所述第一指针的延伸方向经过所述第一转动轴;所述第一角度盘设于所述支撑杆上,所述第一指针设于所述第一旋转部上,或,所述第一角度盘设于所述第一旋转部上,所述第一指针设于所述支撑杆上。
12.根据本实用新型提供的一种瞬变电磁超前地质预报的线圈角度控制装置,所述第
一旋转部上设有与所述第二旋转部连接的连杆,所述第一角度盘设于所述支撑杆上,所述连杆为所述第一指针。
13.根据本实用新型提供的一种瞬变电磁超前地质预报的线圈角度控制装置,所述第二角度控制结构包括第二角度盘和第二指针,所述第二角度盘和所述第二指针并列布置,所述第二转动轴穿过所述第二角度盘的圆心,所述第二指针的延伸方向经过所述第二转动轴;所述第二角度盘设于所述连接杆上,所述第二指针设于所述第二旋转部上,或,所述第二角度盘设于所述第二旋转部上,所述第二指针设于所述连接杆上。
14.根据本实用新型提供的一种瞬变电磁超前地质预报的线圈角度控制装置,所述连接杆上设有所述第二指针,所述第二角度盘设于所述第二旋转部的一侧,所述第二指针的端部具有尖角,所述第二指针的尖角指向于所述第二角度盘的刻度。
15.根据本实用新型提供的一种瞬变电磁超前地质预报的线圈角度控制装置,所述第一旋转部还可移动的设于所述支撑杆,以沿所述支撑杆长度方向移动。
16.根据本实用新型提供的一种瞬变电磁超前地质预报的线圈角度控制装置,所述第一旋转部具有第一旋转孔,所述支撑杆可动的穿设于所述第一旋转孔。
17.根据本实用新型提供的一种瞬变电磁超前地质预报的线圈角度控制装置,所述第二旋转部具有第二旋转孔,所述连接杆可转动的穿设于所述第二旋转孔。
18.根据本实用新型提供的一种瞬变电磁超前地质预报的线圈角度控制装置,所述支撑杆的底部呈尖端状。
19.根据本实用新型提供的一种瞬变电磁超前地质预报的线圈角度控制装置,所述支撑杆的顶部设有找平装置,所述找平装置包括找平块,所述找平块内填充有具有气泡的液体。
20.本实用新型提供的瞬变电磁超前地质预报的线圈角度控制装置,在将支撑杆固定好后,第一旋转部水平旋转,并通过第一角度控制结构控制第一旋转部的水平旋转角度,连接杆相对第二旋转部旋转,并通过第二角度控制结构控制连接杆的垂直旋转角度,可使得瞬变电磁线圈在隧道超前地质预报过程中的水平和垂直角度快速、准确定位,提高了定位精度。相较于现有技术中通过认为去控制瞬变电磁线圈的角度和方位的方式而言,本实用新型给出的瞬变电磁超前地质预报的线圈角度控制装置,可准确确定角度和方位,使得原始数据准确性高,提高了瞬变电磁超前地质预报的结果准确性,进而可保证隧道施工的安全性。
附图说明
21.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
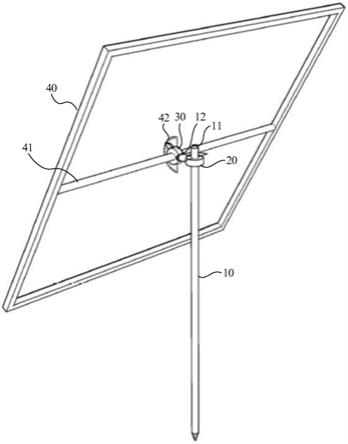
22.图1是本实用新型提供的瞬变电磁超前地质预报的线圈角度控制装置的结构示意图;
23.图2是本实用新型提供的瞬变电磁超前地质预报的线圈角度控制装置的第一角度控制结构和第二角度控制结构的结构示意图;
24.图3是本实用新型提供的瞬变电磁超前地质预报的线圈角度控制装置的瞬变电磁线圈左倾的示意图;
25.图4是本实用新型提供的瞬变电磁超前地质预报的线圈角度控制装置的瞬变电磁线圈上倾的示意图;
26.附图标记:
27.10:支撑杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11:找平装置;
ꢀꢀꢀꢀꢀꢀ
12:第一角度控制结构;
28.121:第一角度盘;
ꢀꢀꢀꢀ
20:第一旋转部;
ꢀꢀꢀꢀ
21:连杆;
29.30:第二旋转部;
ꢀꢀꢀꢀꢀ
31:第二角度盘;
ꢀꢀꢀꢀ
40:瞬变电磁线圈;
30.41:连接杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
411:第二指针;
ꢀꢀꢀꢀꢀ
42:第二角度控制结构。
具体实施方式
31.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.下面结合图1-图4描述本实用新型的瞬变电磁超前地质预报的线圈角度控制装置。
33.请结合参阅图1,该瞬变电磁超前地质预报的线圈角度控制装置,包括:
34.支撑杆10;
35.第一旋转部20,所述第一旋转部20绕第一转动轴可转动的设于所述支撑杆10上,所述第一旋转部20与所述支撑杆10之间设有第一角度控制结构12;
36.瞬变电磁线圈40,所述瞬变电磁圈上设有连接杆41;
37.第二旋转部30,所述第二旋转部30绕第二转动轴可转动的设于所述连接杆41上,所述第一转动轴和所述第二转动轴垂直布置,所述第二旋转部30与所述连接杆41之间设有第二角度控制结构42构,所述第二旋转部30与所述第一旋转部20相连接。
38.优选的,支撑杆10为长杆状,可缩减该装置的整体尺寸,轻量化、简便化,以方便携带。
39.第一旋转部20可绕第一转动轴相对于支撑杆10进行转动,此处的第一转动轴可以是实体结构也可为虚指结构,以方便后续描述,第二转动轴相同,不作赘述。第一转动轴和第二转动轴垂直布置,本实施例中,在第一旋转部20水平旋转时,则表示第二旋转部30可绕连接杆41垂直转动,也即连接杆41相对第二旋转部30垂直转动。
40.另外,第一角度控制结构12用作控制第一旋转部20绕支撑杆10的旋转角度,第二角度控制结构42构用作控制第二旋转部30绕连接杆41的旋转角度。
41.瞬变电磁线圈40用作发射和接收电磁场信号,其呈长方形状的框体结构,连接杆41位于瞬变电磁线圈40内,且连接杆41的两端分别连接瞬变电磁线圈40两对侧的框边,实现对瞬变电磁线圈40的支撑。优选的,连接杆41为长杆状,可使得该装置的整体轻量化、简便化,以方便携带。
42.本实施例中,在将支撑杆10固定好后,第一旋转部20水平旋转,并通过第一角度控
制结构12控制第一旋转部20的水平旋转角度,连接杆41相对第二旋转部30旋转,并通过第二角度控制结构42构控制连接杆41的垂直旋转角度,可使得瞬变电磁线圈40在隧道超前地质预报过程中的水平和垂直角度快速、准确定位,提高了定位精度。相较于现有技术中通过认为去控制瞬变电磁线圈40的角度和方位的方式而言,本实用新型给出的瞬变电磁超前地质预报的线圈角度控制装置,可准确确定角度和方位,使得原始数据准确性高,提高了瞬变电磁超前地质预报的结果准确性,进而可保证隧道施工的安全性。
43.请结合参阅图1和图2,本实用新型一实施例中,所述第一角度控制结构12包括第一角度盘121和第一指针,所述第一角度盘121和所述第一指针并列布置,所述第一转动轴穿过所述第一角度盘121的圆心,所述第一指针的延伸方向经过所述第一转动轴;所述第一角度盘121设于所述支撑杆10上,所述第一指针设于所述第一旋转部20上,或,所述第一角度盘121设于所述第一旋转部20上,所述第一指针设于所述支撑杆10上。
44.将第一角度盘121和第一指针分别设于支撑杆10和第一旋转部20上,在第一旋转部20相对于支撑杆10转动的过程中,第一指针也相对于第一角度盘121转动,进而可精确得知旋转角度,本实施例中,所给出的第一角度盘121为透明的半圆弧状结构,设于支撑杆10上,且可在其中线位置设0
°
标,中线位置正对隧道的掘进方向,该0
°
标用作正对隧道的掘进方向,这样,通过第一指针读数,可清楚得知其水平方向上的左右旋转幅度。
45.在又一实施例中,上述第一角度控制结构12包括多个卡条和卡槽,多个卡条和卡槽分别设于第一旋转部20和支撑杆10上,卡条与卡槽相配合,在旋转的过程中,卡条会转动至与其他卡槽配合,并且在转动过程中发出卡接声响,这样,可通过在转动过程中的卡接声响的次数来判断水平旋转的角度,实现角度控制。
46.紧接着上述的第一角度盘121和第一指针的结构,所述第一旋转部20上设有与所述第二旋转部30连接的连杆21,所述第一角度盘121设于所述支撑杆10上,所述连杆21为所述第一指针。
47.这样,可通过该连杆21的方位对第一旋转部20的角度和方位进行快速判断,使得结构更为简化,方便制作和携带。优选的,连杆21上具有沿所述第一旋转部20至所述垂直旋转部布置的标线,该标线靠近于第一角度盘121,可通过透明状的第一角度盘121清晰准确的得知第一旋转部20的旋转角度,易于使用。
48.请结合参阅图1和图2,本实用新型一实施例中,所述第二角度控制结构42构包括第二角度盘31和第二指针411,所述第二角度盘31和所述第二指针411并列布置,所述第二转动轴穿过所述第二角度盘31的圆心,所述第二指针411的延伸方向经过所述第二转动轴;所述第二角度盘31设于所述连接杆41上,所述第二指针411设于所述第二旋转部30上,或,所述第二角度盘31设于所述第二旋转部30上,所述第二指针411设于所述连接杆41上。
49.将第二角度盘31和第二指针411分别设于连接杆41和第二旋转部30上,在第二旋转部30相对于连接杆41转动的过程中,第二指针411也相对于第二角度盘31转动,进而可精确得知旋转角度,本实施例中,所给出的第二角度盘31为透明的半圆弧状结构,设于第二角度盘31的一侧,且可在其中线位置设0
°
标,中线位置正对隧道的掘进方向,该0
°
标用作正对隧道的掘进方向,这样,通过第二指针411读数,可清楚得知其垂直方向上的上下旋转幅度。
50.在又一实施例中,上述第二角度控制结构42构包括多个卡条和卡槽,多个卡条和卡槽分别设于第二旋转部30和连接杆41上,卡条与卡槽相配合,在旋转的过程中,卡条会转
动至与其他卡槽配合,并且在转动过程中发出卡接声响,这样,可通过在转动过程中的卡接声响的次数来判断垂直旋转的角度,实现角度控制。
51.紧接着上述的第二角度盘31和第二指针411的结构,所述连接杆41上设有所述第二指针411,所述第二角度盘31设于所述第二旋转部30的一侧,所述第二指针411的端部具有尖角,所述第二指针411的尖角指向于所述第二角度盘31的刻度。
52.这样,可清晰准确的得知连接杆41的旋转角度,易于使用。
53.基于上述第一角度控制结构12和第二角度控制结构42构,以清晰的调控瞬变电磁线圈40的角度和方位,方便使用。
54.请结合参阅图1至图4,本实用新型一实施例中,所述第一旋转部20还可移动的设于所述支撑杆10,以沿所述支撑杆10长度方向移动。
55.即,根据需要可将第一旋转部20沿支撑杆10进行移动,进而可调整瞬变电磁线圈40的位置,可根据现场测试时的高度要求,进行调整。
56.具体的,本实施例中,为了实现上述第一旋转部20的转动和移动,所述第一旋转部20具有第一旋转孔,所述支撑杆10可动的穿设于所述第一旋转孔。
57.这样,支撑杆10的截面为圆形形状,第一旋转孔为圆形孔,在将第一旋转部20套设于支撑杆10外周后,可实现旋转,并且可沿支撑杆10长度方向进行移动,实现上述所说的可动。
58.当然,在其他实施例中,第一旋转部20也可通过铰链与支撑杆10转动连接,再通过铰链可移动的设于支撑杆10上,实现上述所说的可动。
59.另外,为了实现上述第二旋转部30的转动,所述第二旋转部30具有第二旋转孔,所述连接杆41可转动的穿设于所述第二旋转孔。
60.这样,连接杆41的截面为圆形形状,第二旋转孔为圆形孔,在将第二旋转部30套设于连接杆41外周后,可实现旋转。
61.当然,在其他实施例中,第二旋转部30也可通过铰链与连接杆41转动连接,实现上述所说的转动。
62.请结合参阅图1、图3以及图4,此外,本实用新型一实施例中,所述支撑杆10的底部呈尖端状。
63.此处所说的尖端状为下部细、上部宽的结构,这样,在放置支撑杆10时,可直接插入隧道底板的碎石土中固定,方便使用。优选的,支撑杆10的底部为锥形结构,以便于插入固定。
64.另外,所述支撑杆10的顶部设有找平装置11,所述找平装置11包括找平块,所述找平块内填充有具有气泡的液体。
65.找平块至少顶面为透明状,这样,当找平块的气泡位于正中心时,即代表支撑杆10垂直于地面,以便于瞬变电磁线圈40的角度方位调整,保证结果的准确性。在其他实施例中,该找平装置11也可为吊锥。
66.本实施例给出的该瞬变电磁超前地质预报的线圈角度控制装置,使得瞬变电磁线圈40可在水平和垂直角度快速、准确定位,提高了定位精度;并且,设备整体化、轻便化,便于隧道作业过程中携带与操作,提高了工作效率。
67.请结合参阅图1至图4,本实用新型一实施例中,给出了该瞬变电磁超前地质预报
的线圈角度控制装置的结构的一种具体实施例,如下:
68.支撑杆10,长度为1.5m,直径为30mm,材质为碳纤维,底部为锥形结构;第一角度盘121,呈半圆弧形状,半径为90mm,材质为透明塑料,设于支撑杆10上,中线正对隧道的掘进方向;找平装置11,直径为20mm,安装于支撑杆10顶部;
69.第一旋转部20,外径为80mm,第一旋转孔的内径为30mm,厚度为30mm,材质为ppr(无规共聚聚丙烯),第一旋转部20可动的套设于支撑杆10;连接杆41,直径为30mm,长度为50mm,刚性连接于第一旋转部20和第二旋转部30;
70.第二旋转部30,外径为80mm,第二旋转孔的内径为30mm,厚度为30mm,材质为ppr(无规共聚聚丙烯),第二旋转部30可转动的套设于连接杆41;第二角度盘31,呈半圆弧形状,半径为90mm,材质为透明塑料,设于第二旋转部30的侧面,中线正对隧道的掘进方向;
71.瞬变电磁线圈40,呈正方形状的框体结构,边长为1m至2m,其方向不分正反;连接杆41,直径为30mm,长度与瞬变电磁线圈40的边长内侧长度相同,固定于瞬变电磁线圈40的中部;第二指针411,与连接杆41为刚性连接,其方向与瞬变电磁线圈40法向方向一致。
72.请结合参阅图1至图4,本实用新型一实施例中,基于上述瞬变电磁超前地质预报的线圈角度控制装置,其运用方法如下:
73.第一步:靠近隧道掌子面,把支撑杆10插入隧道底板的碎石中,利用找平装置11进行找平,使支撑杆10垂直于隧道底板;
74.第二步:通过第二旋转部30旋转垂直瞬变电磁线圈40,使瞬变电磁线圈40上倾45
°
,然后通过第一旋转部20水平旋转瞬变电磁线圈40,分别使瞬变电磁线圈40左倾90
°
、75
°
、60
°
、45
°
、30
°
、15
°
,右倾15
°
、30
°
、45
°
、60
°
、75
°
、90
°
,在每个角度下进行数据采集;
75.第三步:通过第二旋转部30旋转垂直瞬变电磁线圈40,使瞬变电磁线圈40上倾30
°
,然后通过第一旋转部20水平旋转瞬变电磁线圈40,分别使瞬变电磁线圈40左倾90
°
、75
°
、60
°
、45
°
、30
°
、15
°
,右倾15
°
、30
°
、45
°
、60
°
、75
°
、90
°
,在每个角度下进行数据采集;
76.第四步:通过第二旋转部30旋转垂直瞬变电磁线圈40,使瞬变电磁线圈40上倾15
°
,然后通过第一旋转部20水平旋转瞬变电磁线圈40,分别使瞬变电磁线圈40左倾90
°
、75
°
、60
°
、45
°
、30
°
、15
°
,右倾15
°
、30
°
、45
°
、60
°
、75
°
、90
°
,在每个角度下进行数据采集;
77.第五步:通过第二旋转部30旋转垂直瞬变电磁线圈40,使瞬变电磁线圈40正对隧道掌子面,然后通过第一旋转部20水平旋转瞬变电磁线圈40,分别使瞬变电磁线圈40左倾90
°
、75
°
、60
°
、45
°
、30
°
、15
°
,右倾15
°
、30
°
、45
°
、60
°
、75
°
、90
°
,在每个角度下进行数据采集;
78.以此类推,通过第二旋转部30旋转垂直瞬变电磁线圈40,分别使瞬变电磁线圈40下倾15
°
、30
°
、45
°
,并分别在水平方向按照15
°
的间距,进行左倾90
°
至右倾90
°
的角度旋转与数据采集,直至数据采集结束。
79.需知的是,在一实施例中,由于支持杆的存在,瞬变电磁线圈40是不便下倾的,这样,为了实现上述下倾的数据采集,先进行相应上倾度数旋转,然后通过第一旋转部20将瞬变电磁线圈40沿支撑杆10进行180
°
水平旋转,达到瞬变电磁线圈40为下倾度数的目的。
80.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术
方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1