一种基于无人机的港口起重机健康检测系统
1.本实用新型涉及港口起重机检测技术领域,具体涉及一种基于无人机的港口起重机健康检测系统。
背景技术:
2.港口起重机是港口上应用广泛的一种物流装备,主要有岸桥起重机,门式起重机和门座式起重机三种类型。由于起重机频繁的承受交变载荷及长期暴露在温度、湿度多变的港口环境下,它们容易出现疲劳裂纹、腐蚀、磨损、塑形变形、连接部件损坏、以及其他形式的安全缺陷。这些安全隐患的存在容易引起安全事故,对工作人员及设备造成伤害。港口起重机的定期健康检测是预防安全事故发生的有效方式,它可以及时的发现危险缺陷并及时处理,防止演化成安全事故。因此,港口起重机的定期健康检测对港口安全、高效的运行是非常必要的。
3.目前,对港口起重机的健康检测主要以传统的人工方式进行检查。港口工作人员通过目视或辅助少量检测设备对港口起重机的金属结构表面进行检查。这种检测方式存在着容易判断失误、效率低下,对检测人员有着安全风险的缺点。除此之外,港口起重机上存在着一些工作人员难以到达且极其重要的部位,比如岸桥起重机和门式起重机的主梁下盖板,门座式起重机的象鼻梁等部位。因此,针对港口起重机的健康检测迫切需要一种高效,灵活,安全的新型检测方式。
4.近年来,无人机技术得到迅速发展,它有着灵活度高、可操作性强、可以搭载多种传感器和检测设备的优点,目前已经应用到起重机的检测领域,但是也存在着一些缺陷。第一,图像采集检测效率低下,检测系统中无人机的路径规划模块和轨迹规划模块有待完善;第二,缺陷识别效率低、误差大,无人机采集图像后依靠肉眼识别,识别效率低下,主观性强,误差大;第三,单独对高清可见光摄像机采集的图像进行识别存在缺陷检测漏失的缺点。
技术实现要素:
5.针对现有检测技术中的缺陷与不足,本实用新型提出了一种基于无人机的港口起重机健康检测系统,具有图像采集效率高、缺陷识别效率高、缺陷检测更加准确、安全、快捷等优点。
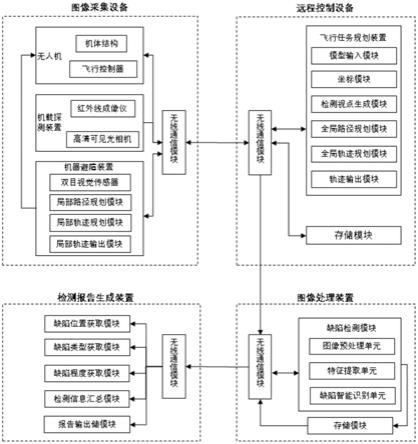
6.为达到以上目的,本实用新型提供一种基于无人机的港口起重机健康检测系统,包括远程控制设备、图像采集设备、图像处理装置和检测报告生成装置。
7.远程控制设备,其包括飞行任务规划装置、无线通讯模块和存储模块。所述飞行任务规划装置包括模型输入模块、坐标模块、检测视点生成模块、全局路径规划模块、全局轨迹规划模块和轨迹输出模块,远程控制设备用于无人机的全局路径规划、全局轨迹规划,将生成的无人机轨迹通过无线通讯模块传达给无人机的飞行控制器,并储存传送回来的港口起重机表面的图像信息。
8.图像采集设备,其包括无人机、机载探测装置、机器避障装置和无线通信模块。所述无人机包括机体结构和飞行控制器,所述机载探测装置包括红外线成像仪和高清可见光相机,所述机器避障装置包括双目视觉传感器、局部路径规划模块、局部轨迹规划模块和局部轨迹输出模块,图像采集设备用于执行远程控制设备传送来的飞行任务,在执行任务的过程中,对实时障碍物进行躲避,最终完成对港口起重机待检测部位的图像进行采集,并将采集的图像信息传送给远程控制设备中的存储模块进行储存。
9.图像处理装置,其包括缺陷检测模块、无线通讯模块和存储模块。所述缺陷检测模块包括图像预处理单元、特征提取单元和缺陷智能识别单元,图像处理装置用于港口起重机表面图像的缺陷检测和缺陷信息储存。
10.检测报告生成装置,其包括缺陷位置获取模块、缺陷类型获取模块、缺陷程度获取模块、检测信息汇总模块、报告输出模块和无线通讯模块。检测报告生成装置用于经过图像处理后获得的缺陷位置、类型、程度信息的获取与汇总,并将报告输出。
11.进一步,所述远程控制设备和图像采集设备通过无线通信模块进行连接,所述远程控制设备和图像处理装置通过无线通信模块连接,所述图像处理装置与检测报告生成装置通过无线通信模块连接。
12.进一步,所述远程控制设备中飞行任务规划装置的模型输入模块为港口起重机三维模型的输入模块。
13.进一步,所述远程控制设备中飞行任务规划装置的坐标模块是为输入的港口起重机的三维模型建立三维坐标系,并获取飞行任务的起点坐标和终点坐标。
14.进一步,所述远程控制设备中飞行任务规划装置的检测视点生成模块是为了获取无人机拍摄点的位置及坐标。
15.进一步,所述图像采集设备中的无人机采用四旋翼无人机,并且无人机设有防护装置,防止发生碰撞。
16.进一步,所述图像采集设备中的机载探测装置和机器避障装置均搭载在无人机机体上。
17.进一步,无人机采用双目视觉传感器与gps定位系统对无人机进行定位。
18.进一步,所述图像采集设备中机器避障装置的双目视觉传感器均匀布置在无人机机体的六个方向上,即每个方向上布置一个双目视觉传感器。
19.本实用新型的有益效果为:
20.针对目前港口起重机健康检测的效率低下,缺陷识别效率低下、误差大,缺陷检测不全面的特点,本实用新型提出了一种基于无人机的港口起重机健康检测系统,该系统使用搭载高清可见光相机和红外热成像仪等探测装置的无人机进行港口起重机检测部位的图像采集,并使用图像处理技术进行缺陷智能识别,最终生成检测报告。除此之外,该检测系统中加入了无人机的路径规划模块与轨迹规划模块,使得图像的采集更加高效。
附图说明
21.下面结合附图和实施例对本实用新型作进一步说明:
22.图1为本实用新型中一种基于无人机的港口起重机健康检测系统结构示意图;
23.图2为本实用新型中一种基于无人机的港口起重机健康检测系统工作流程示意
图;
24.图3为本实用新型中一种基于无人机的港口起重机健康检测系统中图像处理装置的工作流程示意图。
具体实施方式
25.下面结合附图对本实用新型的具体实施方式做详细说明。
26.请参考图1,一种基于无人机的港口起重机健康检测系统,包括远程控制设备、图像采集设备、图像处理装置和检测报告生成装置,其中,所述远程控制设备和图像采集设备通过无线通信模块进行连接,所述远程控制设备和图像处理装置通过无线通信模块连接,所述图像处理装置与检测报告生成装置通过无线通信模块连接。
27.进一步,所述远程控制设备,包括飞行任务规划装置、无线通讯模块和存储模块,所述飞行任务规划装置包括模型输入模块、坐标模块、检测视点生成模块、全局路径规划模块、全局轨迹规划模块和轨迹输出模块,远程控制设备通过无线通信模块向无人机传送该系统规划的无人机轨迹,并通过无线通信模块接收无人机传送回来的图像信息。
28.进一步,所述图像采集设备,包括无人机、机载探测装置、机器避障装置和无线通信模块。所述无人机包括机体结构和飞行控制器,所述机载探测装置包括红外线成像仪和高清可见光相机,所述机器避障装置包括双目视觉传感器、局部路径规划模块,局部轨迹规划模块和局部轨迹输出模块,图像采集设备主要用于执行远程控制设备传送来的飞行任务,完成对港口起重机待检测部位的图像采集,并将采集的图像信息传送给远程控制设备中的存储模块进行储存。其中,机器避障装置是为了躲避无人机飞行过程中的不可预测的障碍物,当该装置中的双目视觉传感器监测到障碍物时,该装置及时的进行局部路径规划和局部轨迹规划,并将飞行轨迹传送给无人机的飞行控制器,当无人机顺利避开障碍物后,再重新回到无人机的全局飞行轨迹上,继续进行图像采集任务,直到无人机到达任务终点,图像采集任务结束。
29.进一步,所述图像处理装置,包括缺陷检测模块、无线通讯模块和存储模块。所述缺陷检测模块包括图像预处理单元、特征提取单元和缺陷智能识别单元,无人机采集的图像首先要经过图像预处理单元对图像进行降低噪声、模糊、抖动和畸变干扰,接下来通过特征提取单元进行缺陷区域识别,并将缺陷区域图像进行灰度化和二值化处理,最终将经过特征提取单元后的图像数据与历史数据库中的图像数据进行比对,对缺陷进行智能识别,将缺陷信息储存在存储模块中,并发送给检测报告生成装置。
30.进一步,所述检测报告生成装置,包括缺陷位置获取模块、缺陷类型获取模块、缺陷程度获取模块、检测信息汇总模块、无线通讯模块和报告输出模块。检测报告生成装置首先接收图像处理装置发送来的缺陷信息,然后缺陷位置获取模块、缺陷类型获取模块、缺陷程度获取模块从缺陷信息中分别获取缺陷的位置、类型和程度,最后通过检测信息汇总模块将各位置的缺陷信息进行汇总并将报告输出。
31.如图2所示,本实用新型通过以下步骤实现:
32.步骤一:针对待检测的港口起重机,选择对应类型的港口起重机的三维模型输入到模型输入模块;
33.步骤二:通过坐标模块对该港口起重机的三维模型建立坐标系,并获取无人机飞
行任务的起点和终点坐标;
34.步骤三:针对需要检测的港口起重机的结构表面,通过检测视点生成模块生成无人机的检测视点,检测视点位于通过检测表面中点向外的法向方向上;
35.步骤四:通过全局路径规划模块规划一条通过所有检测视点的最优路径;
36.步骤五:通过全局轨迹规划模块对生成的全局路径进行优化,使其满足无人机的速度、加速度约束;
37.步骤六:通过轨迹输出模块和无线通信模块将规划的无人机轨迹传送给无人机的飞行控制器,使无人机沿着指定的轨迹飞行,直到飞到无人机的终点,将图像信息全部传送给远程控制设备,飞行任务结束,在飞行过程中,通过机器避障装置躲避飞行过程中的实时障碍物;
38.步骤七:将图像数据传送给图像处理装置,通过图像预处理单元、特征提取单元和缺陷智能识别单元获取缺陷信息并储存在存储模块,具体流程如图3所示;
39.步骤八:通过缺陷位置获取模块、缺陷类型获取模块和缺陷程度获取模块从缺陷信息中分别获取缺陷的位置、类型和程度,最后通过检测信息汇总模块将各位置的缺陷信息进行汇总,进而生成检测报告。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1