扫描探针显微镜系统的制作方法
1.本技术涉及显微镜技术领域,特别是涉及一种扫描探针显微镜系统。
背景技术:
2.扫描探针显微镜(scanning probe microscope,spm)采用尖锐的探针在样品表面扫描的方法来获取样品表面的一些性质。不同的spm通常使用不同的传感探针,它们的针尖特性及相应针尖-样品相互作用不同。扫描隧道显微镜(scanning tunneling microscopy,stm)是spm中的最先被发明的仪器类型。stm基于电子隧道效应的原理、使用一个导电的金属针尖来检测隧道电流,从而检测样品的局域电子态密度来测量成像。
3.原子力显微镜(atomic force microscope,afm)是spm中的另一重要仪器类型,目前应用最为广泛。afm能够对样品的形貌进行成像。afm还能够对样品局域表面电势、电荷、载流子密度、导电性等进行高分辨的测量和成像。目前在不同环境下,需要使用不同传感探针,此时需要配备不同的主机探头及测控系统,甚至需要设计和配备整套的专用仪器,导致实施的技术难度很大,成本很高,费时费力。
技术实现要素:
4.基于此,本技术针对上述技术问题,提供一种扫描探针显微镜系统。
5.本技术提供一种扫描探针显微镜系统,包括:
6.多个探针架,每一个探针架被配置为安装一个传感探针;
7.主机探头,包括前置电路和定位导槽,所述定位导槽被配置为可拆卸的安装所述多个探针架,所述探针架与所述前置电路电气连接;
8.主机底座,被配置为支撑所述主机探头,并与所述传感探针信号连接;以及
9.测控装置,与所述主机底座信号连接。
10.在其中一个实施例中,所述多个探针架中的任意一个探针架安装于所述定位导槽时,其上的传感探针的针尖相对于所述定位导槽的位置不变。
11.在其中一个实施例中,所述定位导槽被配置为通过插入的方式的安装所述多个探针架。
12.在其中一个实施例中,所述传感探针包括自感应原子力探针、激光检测原子力探针和扫描隧道显微镜探针。
13.在其中一个实施例中,所述主机探头还包括:
14.激光二极管,其发射的激光照射在所述激光检测原子力探针的设定位置;以及
15.位置检测器,所述设定位置反射的激光照射在所述位置检测器的中心位置。
16.在其中一个实施例中,所述前置电路包括:
17.识别电路,与所述探针架电气连接。
18.在其中一个实施例中,所述前置电路还包括:
19.前置驱动电路,所述前置驱动电路的第一端与所述传感探针连接;以及
20.自激发电路,与所述前置驱动电路连接形成负反馈环路。
21.在其中一个实施例中,所述前置驱动电路包括:
22.信号衰减电路,所述信号衰减电路的第一端与所述传感探针连接;
23.电容补偿电路,所述电容补偿电路的第一端与所述信号衰减电路的第二端连接;以及
24.电流电压转换电路,所述电流电压转换电路的第一端与所述电容补偿电路的第二端连接。
25.在其中一个实施例中,所述自激发电路包括:
26.程控增益放大电路,所述程控增益放大电路的第一端与所述电流电压转换电路的第二端连接;
27.均方根电路,所述均方根电路的第一端与所述程控增益放大电路的第二端连接;
28.减法电路,所述减法电路的第一端与所述均方根电路的第二端连接;
29.乘法器,所述乘法器的第一端与所述减法电路的第二端连接,所述乘法器的第二端与所述程控增益放大电路的第二端连接;
30.移相电路,所述移相电路的第一端与所述乘法器的第三端连接;以及
31.模拟开关,所述模拟开关的第一端与所述移相电路的第二端连接,所述模拟开关的第二端与所述信号衰减电路的第三端连接。
32.在其中一个实施例中,所述前置驱动电路包括多个运算放大器,所述多个运算放大器在1微秒内的电压幅度变化为
±
0.01%,高压摆率大于等于16v/s。
33.上述扫描探针显微镜系统包括多个探针架、主机探头、主机底座以及测控装置。每一个探针架被配置为安装一个传感探针。主机探头包括前置电路和定位导槽。所述定位导槽被配置为可拆卸的安装所述多个探针架。所述探针架与所述前置电路电气连接。主机底座被配置为支撑所述主机探头,并与所述传感探针信号连接。测控装置与所述主机底座信号连接。本技术对于每一个类型的传感探针,设计并配置一个探针架。所有的探针架可以可拆卸的安装在主机探头的定位导槽中。并且,所有的探针架均可以与前置电路电气连接。使用时,选择其中的一个探针架安装在主机探头的定位导槽中,测控装置通过主机底座与相应的传感探针实现信号交互,以使得扫描探针显微镜系统可以实现任意测量成像功能即选即用,实现了多种传感探针的兼容使用。
附图说明
34.为了更清楚地说明本技术实施例或传统技术中的技术方案,下面将对实施例或传统技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
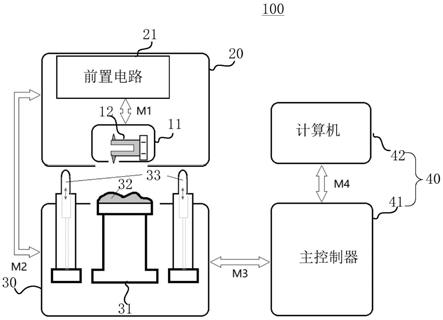
35.图1为本技术一个实施例提供的扫描探针显微镜系统的结构示意图;
36.图2本技术又一个实施例提供的扫描探针显微镜系统的结构示意图;
37.图3为本技术再一个实施例提供的扫描探针显微镜系统的结构示意图;
38.图4为本技术一个实施例提供的前置电路结构连接示意图;
39.图5为本技术一个实施例提供的前置驱动电路结构连接示意图。
40.主要元件附图标号说明
41.100、扫描探针显微镜系统;11、探针架;12、传感探针;20、主机探头;21、前置电路;22前置驱动电路;23自激发电路;221、信号衰减电路;222电容补偿电路;223电流电压转换电路;231、程控增益放大电路;232、均方根电路;233、减法电路;234乘法器;235、移相电路;236、模拟开关;24、激光二极管;25位置检测器;30、主机底座;31、压电扫描器;32待扫描样品;33、探针高度粗调组件;40、测控装置;41、主控制器;42、计算机。
具体实施方式
42.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图对本技术的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似改进,因此本技术不受下面公开的具体实施的限制。
43.可以理解,本技术所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一元件与另一个元件区分。举例来说,在不脱离本技术的范围的情况下,可以将第一获取模块称为第二获取模块,且类似地,可将第二获取模块称为第一获取模块。第一获取模块和第二获取模块两者都是获取模块,但其不是同一个获取模块。
44.需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
45.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
46.本技术提供一种扫描探针显微镜系统100。扫描探针显微镜系统100包括多个探针架11、主机探头20、主机底座30以及测控装置40。
47.每一个探针架11被配置为安装一个传感探针12。主机探头20包括前置电路21和定位导槽。所述定位导槽被配置为可拆卸的安装所述多个探针架11,所述探针架11与所述前置电路21电气连接。主机底座30被配置为支撑所述主机探头20,并与所述传感探针12信号连接。测控装置40与所述主机底座30信号连接。测控装置40的结构不做具体限定,只要可以所述主机底座30信号连接,以与相应的传感探针12实现信号交互,以使得扫描探针显微镜系统100可以实现任意测量成像功能即选即用即可。
48.在一个可以实施的方式中,所述测控装置40包括主控制器41和计算机42。扫描探针显微镜系统100中的主控制器41主要包括:粗调控制电路、扫描控制电路、反馈及成像电路等。反馈控制电路的作用是接收传感探针12所探测的信号(如afm中的力信号),与所设定的参考信号(如设定力的大小为1纳牛)相比较后输出误差信号,根据该误差信号调整压电扫描器31的在垂直方向(z方向)的电压值vz,从而控制待扫描样品32的高度使探针和待扫描样品32间的有效间距、或探针的形变量、或相互作用力保持恒定。这样,电压值vz可作为不同位置时待测待扫描样品32的局部高度即形貌。通过扫描控制电路使探针针尖在待测待
扫描样品32上的位置扫描,即可的到形貌图像。
49.本技术对于每一个类型的传感探针12,设计并配置一个探针架11。所有的探针架11可以可拆卸的安装在主机探头20的定位导槽中。并且,所有的探针架11均可以与前置电路21电气连接。使用时,选择其中的一个探针架11安装在主机探头20的定位导槽中,测控装置40通过主机底座30与相应的传感探针12实现信号交互,以使得扫描探针显微镜系统100可以实现任意测量成像功能即选即用,实现了多种传感探针12的兼容使用。
50.在其中一个实施例中,所述多个探针架11中的任意一个探针架11安装于所述定位导槽时,其上的传感探针12的针尖相对于所述定位导槽的位置不变。即,一个主机探头20可配置多种探针架11,不同探针架11、安装不同传感探针12时探针针尖的机械位置基本保持不变(主机底座30也完全一样)。使得每次测量时探针针尖相对于待扫描样品32的中心位置也基本不变,方便实现原位的、比较性测量。
51.在其中一个实施例中,所述定位导槽被配置为通过插入的方式的安装所述多个探针架11。对于每一个类型的传感探针12,设计并配置一种探针架11组件,使其能够满足其机械结构的安装要求。所有探针架11的外部安装尺寸都能够兼容,使得所有探针架11可通过插入方式紧密安装在主机探头20的定位导槽中。
52.探针架11与主机探头20之间电气接口兼容,测控装置40具有所有传感探针12所需的测量功能、可实现即选即用。即,探针架11与主机探头20之间采用统一的电气接口,兼容各种传感探针12,可实现探针架11类型的自动识别,也可通过用户测控软件(计算机42、手机等)实现测量功能或参数的配置或修改,所有传感探针12的任意测量成像功能均可实现即选即用。
53.在其中一个实施例中,所述传感探针12包括自感应原子力探针(下述称为自感应afm探针)、激光检测原子力探针(下述称为激光检测afm探针)和扫描隧道显微镜探针。如图1-3所示,分别为采用音叉型自感应afm探针的扫描探针显微镜系统100结构图、采用激光检测afm探针的扫描探针显微镜系统100结构图以及采用扫描隧道显微镜探针的扫描探针显微镜系统100结构图。
54.本实施例中,共设计了三种探针架11:自感应afm探针的探针架11、激光检测afm探针的探针架11、扫描隧道显微镜探针的探针架11。其中自感应afm探针的探针架11又有两种类型(尺寸稍有不同),分别用于安装自制的平衡音叉型自感应探针和a-probe自感应探针,可实现基于频率调制和音叉探针自激发的测量与形貌成像功能。激光光检测afm探针的探针架11可安装两种探针,分别实现接触模式和基于幅度调制的轻敲模式的测量与形貌成像功能。扫描隧道显微镜的探针架11用于安装扫描隧道显微镜中通常采用钨(w)或铂/铱(ptir)金属细丝、通常电化学刻蚀的方式形成尖锐的针尖,可实现扫描隧道显微镜的测量成像功能。
55.扫描探针显微镜系统100中的主机探头20安装在主机底座30的上方,通过主机底座30中的探针高度粗调组件33(步进马达和升降运动丝杆)支撑,在本例中共有3套包含运动丝杆在内的高度粗调组件。高度粗调组件在主控制器41和计算机42的控制下,可以带动丝杆升降,从而带动主机探头20的升降,使得探针针尖和待扫描样品32之间的间距变化。在扫描探针显微镜进行测量和成像时,针尖和待扫描样品32之间的通常处于接触状态(相互之间为斥力相互作用)或者间距很小(为引力相互作用,或静电力、磁力等长程力相互作用
为主,间距为几纳米-100纳米范围),并且需要测量该相互作用力的大小或通过该相互作用力来实现测量或成像。
56.扫描探针显微镜系统100中的主机探头20可配置多种探针架11,分别用于自感应afm探针、激光检测afm探针和扫描隧道显微镜探针等的安装,但每次只能同时插入其中的一个探针架11。而前置电路21则同时包含了各种类型的探针信号处理所需要的全部电路。在其中一个实施例中,所述前置电路21包括识别电路。识别电路与所述探针架11电气连接。可通过识别电路自动识别探针架11类型后自动选择使用这些电路,或通过主控制器41或用户软件(计算机42)来选择这些电路的使用。
57.扫描探针显微镜系统100中的主机底座30包含压电扫描器31。待测待扫描样品32先安装在待扫描样品32台上,样平台安装在压电扫描器31上。压电扫描器31的作用是带动待测待扫描样品32在x、y、z这三个方向的位置移动,实现待扫描样品32的扫描和高度的精确运动控制,运动控制的范围最大通常为1微米-100微米,精度或分辨率可达0.01纳米左右。在主机底座30中,通常设置了压电扫描器31及待测待扫描样品32在水平面内的第二位置调节装置,其调节范围通常约为+/-10毫米左右。
58.探针架11电气信号接口(兼容各种探针),如表1所示。在主机探头20中,探针架11和前置电路21通过m1-探针架11和前置电路21之间的信号相连接,共有8个信号。其中引脚2(di2-iso)和引脚3(di3-iso)用于探针架11类型的自动识别。在没有安装探针架11时这两个输入信号悬空,信号均为高电平(为11)。
59.表1探针架11组件与前置电路21之间的信号接口(兼容各种探针)
[0060][0061]
对于不同的探针架11,具体识别方法和工作过程如下:
[0062]
1、自感应afm探针的探针架11:
[0063]
在自感应afm探针的探针架11上,这两个信号与信号地(引脚5,模拟信号地)直接相连,因此在安装自感应afm探针的探针架11后,这两个输入信号被短路到地,信号均为低电平(为00),扫描探针显微镜的主控制器41和计算机42就可判断此时使用的是音叉型自感应探针的探针架11。这时,引脚4(tf tapping,tf的探针振动激励)和引脚7(tf sensor,tf
传感信号输出),连接至探针信号前置电路21,用于将用于音叉型自感应探针的测量或成像;而引脚1、引脚6和引脚8则不起作用。
[0064]
自感应afm探针的探针架11又有两种类型(尺寸稍有不同),分别用于安装自制的平衡音叉型自感应探针和a-probe自感应探针,可实现基于频率调制和音叉探针自激发的测量与形貌成像功能。这两种不同的自感应探针的物理尺寸略有不同,因此,探针架11也略有不同。这两种不同的自感应探针的驱动和检测的电路参数也略有不同,因此其测控参数的设置也略有不同;可通过在主控制器41或计算机42上的测控软件由用户手动完成设置。
[0065]
2、激光检测afm探针的探针架11
[0066]
在激光检测afm探针的探针架11上,引脚2(di2-iso)与信号地(引脚5,模拟信号地)直接相连,引脚3(di3-iso)悬空(未连接)。在安装激光检测afm探针的探针架11后,这两个输入信号为分别为低电平和高电平(01),扫描探针显微镜的控制器和计算机42中测控软件就可判断此时使用的是激光检测afm探针的探针架11。如图2所示,主机探头20中的前置电路21输出可驱动激光二极管24发出激光信号,照射到微悬臂探针的背面,然后发射到位置检测器25,用于探测微悬臂探针的形变量,从而检测探针和待扫描样品32间的相互作用力。这样,即可实现接触模式afm的测量和成像功能。
[0067]
如果安装的是轻敲模式的afm探针,则可通过引脚1(afm tapping,afm的探针振动激励)将主控制器41提供的探针振动激励输出到探针上,从而实现轻敲模式afm的测量和成像功能。接触模式和轻敲模式这两种不同的激光检测型afm的驱动和检测的电路参数略有不同,因此其测控参数的设置也略有不同;可通过在主控制器41或计算机42上的测控软件由用户手动完成设置。
[0068]
另外,如果安装的针尖是可导电的afm探针,可将探针偏压信号通过引脚6(tip bias,探针偏压)输出到探针的导电针尖上,从而实现导电原子力显微镜、静电力显微镜或开尔文探针力显微镜等基于导电afm的测量和成像的功能。
[0069]
3、扫描隧道显微镜的探针架11
[0070]
在扫描隧道显微镜的探针架11上,引脚2(di2-iso)悬空(未连接),引脚3(di3-iso)与信号地(引脚5,模拟信号地)直接相连,因此这两个输入信号为分别为高电平和低电平(10)。扫描探针显微镜的控制器和计算机42中测控软件就可判断此时使用的是扫描隧道显微镜的探针架11。如图3所示,从针尖来的隧穿电流信号通过引脚4(stm sensor,隧穿电流)接入主机探头20中的探针信号前置电路21,从而完成扫描隧道显微镜的测量与成像功能。
[0071]
在其中一个实施例中,所述主机探头20还包括激光二极管24和位置检测器25。
[0072]
激光二极管24发射的激光照射在所述激光检测原子力探针的设定位置。所述设定位置反射的激光照射在所述位置检测器25的中心位置。
[0073]
需要说明的是,主机探头20中的激光二极管24和位置检测器25等部件只有在使用激光检测型afm探针的探针架11是才需要使用,但这两个部件总是安装在主机探头20中备用的。激光二极管24可以为半导体激光二极管。位置检测器25用于检测激光光斑位置。可选地,主机探头20中,对于激光二极管24和位置检测器25分别设置了其在水平面内的第一位置调节装置,其调节范围通常约为+/-5毫米左右。
[0074]
为了使石英音叉进行自振荡时在其谐振频率上振幅保持不变。这就需要探针测控
电路中的自振荡模块和前级驱动模块形成一个具有特定功能的电回路。在其中一个实施例中,所述前置电路21还包括前置驱动电路22和自激发电路23以及测频模块(图中未示出)。所述前置驱动电路22的第一端与所述传感探针12连接。自激发电路23与所述前置驱动电路22连接形成负反馈环路。
[0075]
前置驱动电路22起到激励信号输入和响应信号输出的作用,这一部分会直接与传感探针12连接。这部分的误差会对信号质量产生非常大的影响。请参见图4,在其中一个实施例中,所述前置驱动电路22包括信号衰减电路221、电容补偿电路222以及电流电压转换电路223。所述信号衰减电路221的第一端与所述传感探针12连接。所述电容补偿电路222的第一端与所述信号衰减电路221的第二端连接。所述电流电压转换电路223的第一端与所述电容补偿电路222的第二端连接。信号衰减电路221能够使驱动石英音叉的信号减弱。减弱后的信号可以被提供给石英音叉和电容补偿电路222。这两条线路的输出信号叠加,可以仅使石英音叉的压电电流被电流电压转换电路223放大。前置驱动电路22输出的信号经缓冲电路继续输入给下一级。
[0076]
请一并参见图5,在其中一个实施例中,所述前置驱动电路22包括多个运算放大器。这部分电路的构成主要是集成运算放大器。本次电路设计选用的芯片是是一款高精度低功耗高速运算放大器。每一片芯片都含有两个运算放大器,这一点很大程度上便利了电路板的结构简化,节约了电路的空间。在本电路设计中,对性能的主要诉求体现在速度和低噪声。电路实现了1μs时间内建立运算放大器的电压幅度变化
±
0.01%,高压摆率也能够超过16v/s。电路对运算放大器的高速率要求是出于防止信号在经过电路时出现失真现象,尤其是保持高速信号的形状完整性。在类似于石英音叉探针这样信号微弱的器件上进行工作时,高速率就显得不可或缺。
[0077]
自激发电路23对电路信号进行以负反馈为形式的控制,形成环路,与前置驱动电路22联动。负反馈对信号幅度起到了自动控制和想为调整的作用,使得信号幅值和信号相位满足自激发的条件。
[0078]
在其中一个实施例中,所述自激发电路23包括程控增益放大电路231、均方根电路232、减法电路233、乘法器234、移相电路235以及模拟开关236。
[0079]
所述程控增益放大电路231的第一端与所述电流电压转换电路223的第二端连接。所述均方根电路232的第一端与所述程控增益放大电路231的第二端连接。所述减法电路233的第一端与所述均方根电路232的第二端连接。所述乘法器234的第一端与所述减法电路233的第二端连接,所述乘法器234的第二端与所述程控增益放大电路231的第二端连接。移相电路235,所述移相电路235的第一端与所述乘法器234的第三端连接。所述模拟开关236的第一端与所述移相电路235的第二端连接,所述模拟开关236的第二端与所述信号衰减电路221的第三端连接。
[0080]
程控增益放大电路231可以放大上文中描述的来自前置驱动电路22的信号。下一部分是均方根电路232,用于测量放大信号振幅的均方根值。上面的两个信号:放大信号和均方根值,继续输入至减法电路233,处理后再由增益控制部分传递给移相电路235。在移相电路235中,电路能够控制某种相移作用于信号,使产生信号可以作为“驱动信号”,并对其进行监测。最终,经过一个模拟开关236,信号被送入前置驱动电路22。
[0081]
在上述电路中,电路的驱动不依赖于外界信号的输入,而是可以利用电路中的噪
声等信号,经过如放大等的处理,驱动探针工作在共振频率。当驱动电路趋于平稳时,电路中的信号只有频率与音叉探针共振频率相等的信号(一般为正弦信号),其他频率的信号被衰减。这种情况下,石英音叉探针可以被看作带通滤波器,且因为其只选择共振频率,通频带极窄,具有较好的选频特性,其谐振频率处的增益很高。环路稳定状态下,仅频率等于共振频率的信号的环路增益等于1,具有其他频率的信号因为带通滤波器的存在,其环路增益皆小于1,呈现不同幅度的衰减。进入稳定状态一段时间后,环路中将仅剩谐振频率的信号。
[0082]
扫描探针显微镜系统100的典型工作过程如下:
[0083]
1、安装待扫描样品32。将待测试样固定在待扫描样品32台上(待扫描样品32台通常为圆形铁片),再将待扫描样品32台放置在压电扫描器31上。
[0084]
2、安装传感探针12。将传感探针12安装在对应的探针架11上,将探针架11插入主机探头20的探针架11安装位置。
[0085]
3、调节激光光路(音叉型自感应探针和扫描隧道显微镜不需进行此步骤)。调节主机探头20右侧的激光二极管24的位置调节旋钮(有2个旋钮,分别用于前后和左右的位置调节),使发出的激光刚好照射在微悬臂探针背面的适当位置。接着调节主机探头20右侧的位置检测器25的位置调节旋钮(有2个旋钮,分别用于前后和左右的位置调节),使微悬臂发射的激光刚好照射在位置检测器25的中心位置。
[0086]
4、探针振动曲线测量及参数设置(即q曲线测量,对于接触模式afm和扫描隧道显微镜没有这一步骤)。首先,对探针施加正弦电压激发信号激发其机械振动并测量其振幅和相位,得到q曲线。其次,根据q曲线选择适当的电压、频率和振幅等参数的信号,使探针进入激发振动的状态。
[0087]
5、探针-待扫描样品32间距的自动逼近。设置探针传感信号的参考值(如afm中的力参考值为1纳牛),通过自动(或手动)方法使探针针尖和待扫描样品32相接触并保持传感信号与所设置的参考值相等。自动逼近的方法是,主控制器41中的粗调控制电路输出马达控制信号,驱动主机底座30中的探针高度粗调组件33中的丝杆向下运动,从而使主机探头20向下移动,减小探针和待扫描样品32之间的间距直到探针所检测到的传感信号(如力的大小)与参考值相等。
[0088]
值得注意的是,在不同的传感探针12和测量模式中,传感信号有所不同。在接触模式afm中,探针微悬臂的形变量与探针所受到的力成正比;在轻敲模式afm中,探针微悬臂的振动幅度代表针尖所受到的力的大小。在音叉型自感应探针的频率调制成像模式中,音叉振动频率的变化代表针尖所受到的力梯度的大小。在扫描隧道显微镜中,将探针和被测待扫描样品32的距离调节到纳米尺度使产生稳定的隧道电流。
[0089]
自动逼近完成后,反馈控制电路接收传感探针12所探测的信号(如afm中的力信号),与所设定的参考值(如设定力的大小)相比较后输出误差信号,根据该误差信号调整压电扫描器31的在垂直方向(z方向)的电压值vz,从而控制待扫描样品32的高度使探针和待扫描样品32间的有效间距、或探针的形变量、或相互作用力保持恒定。
[0090]
6、形貌扫描。在正常的成像条件下,通过主控制器41中的扫描控制电路输出x和y方向的扫描驱动信号,使压电扫描器31产生扫描光栅,保持探针传感信号恒定可实现对待测待扫描样品32逐点扫描。扫描得到的图像(如形貌图)则有计算机42及测控软件来显示和处理。
[0091]
7、单点测量功能,包括谱曲线测量。在形貌扫描完成后,可将探针定位在待扫描样品32上所选定的某个位置,利用传感探针12对待扫描样品32进行局域的特性测量,如测量该位置的力-距离曲线。
[0092]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0093]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1