一种用于巷道掘进机找正的装置的制作方法
1.本实用新型涉及矿下巷道用掘进机的技术领域,具体涉及一种用于巷道掘进机找正的装置。
背景技术:
2.在矿下巷道施工中,掘进机的割煤部持续割煤使工作面得以推进,但因传感器的误差累计和机械运动等影响,在割煤几个循环后容易出现工作面与运输机不直、与液压支架不齐的情况,即掘进机的实际行进路线偏离了设计或拟定的行进路线,容易导致切割料无法顺利运出、施工速度减慢、施工质量较差或施工事故等问题。
3.目前,掘进机沿巷道中轴线进行掘进时,虽然可以依靠自身的监测装置监测掘进机横向偏移的方向,但不能监测掘进机横向偏移的距离;因此,当掘进机的行进路线出现偏移时,需要人工修正,即人工操控掘进机以修正掘进机的行进路线,但人工修正前需要先停止掘进机,然后利用测量工具测量掘进机的偏移距离,再进行路线修正,这会造成连续生产中工作面的中断,不仅容易影响正常的生产进度,还容易对施工质量造成影响。
4.中国专利cn201610253599.9 巷道掘进机自动找正方法,该专利提出了一种可测得掘进机的偏移方向和偏移距离的方法,以使掘进机可实现实时自动修正行进路线,该专利中还公布实现该方法的装置,该装置包括设于巷道的初始校准点的两反射面和设于掘进机上且对应两反射面的两个激光测距仪,两反射面均为竖直平面且两反射面存在夹角,两激光测距仪位于同一水平面且发出的激光平行,两激光测距仪的发射端齐平且有一定横向间距;请参见附图8,基于激光测距仪工作原理,激光测距仪1与反射面62不同距离时,为使激光测距仪正常工作,两反射面的夹角由激光测距仪的适应角度决定,结合该专利内容,偏移距离的测量范围由两激光测距仪的横向间距和两反射面的夹角决定。在掘进机上直接安装激光测距仪,需要先针对安装位置进行精密计算,不仅计算较为复杂,而且安装时容易受安装精度的影响,难以保证两个激光测距仪的发射端齐平以及发出的激光平行;在后续使用中,当两激光测距仪的横向间距需要调整时,需要重新进行计算和安装,较为麻烦,容易影响施工进度。
技术实现要素:
5.针对现有技术的上述不足,本实用新型要解决的技术问题是提供一种用于巷道掘进机找正的装置,避免在掘进机上直接安装激光测距仪,存在安装和后续调整困难的问题,取得方便调整激光测距仪的位置以满足安装精度和后续使用要求的效果。
6.为解决上述技术问题,本实用新型采用如下技术方案:
7.种用于巷道掘进机找正的装置,包括测距单元,测距单元包括两个激光测距仪;两个激光测距仪并排设置在底座上,一个激光测距仪与底座之间设有调整架;调整架包括自下而上依次设置的x向基座、x向滑块、y向滑块和z向转台,x向基座固定设于底座上,x向滑块与x向基座滑动配合并可沿水平横向滑动,y向滑块与x向滑块滑动配合并可沿水平纵向
滑动, z向转台与y向滑块转动连接并可水平转动。
8.进一步地,y向滑块上设有竖向贯穿的连接孔,z向转台的下表面对应连接孔的位置具有凸起形成的z向转轴,z向转轴位于连接孔内,z向转轴上套设有扭簧,扭簧的两端分别与z向转台和y向滑块相连;z向转台为圆形板结构,z向转台的圆周面上具有沿径向凸起延伸形成的定位板,定位板的一侧设有微分头,微分头的基体与y向滑块固接,定位板在扭簧的作用下与微分头的伸缩端保持抵接以便通过转动微分头来调整z向转台的转动幅度。
9.进一步地,定位板的另一侧设有夹紧螺栓,夹紧螺栓的杆部与微分头的伸缩端正对,y向滑块上对应夹紧螺栓的位置设有支板,夹紧螺栓穿过支板上的螺纹孔与支板螺纹连接。
10.进一步地,底座上设有水准泡;z向转台上设有调平板,对应的激光测距仪安装在调平板上,位于调平板上的激光测距仪上也设有水准泡;调平板与z向转台之间竖向设有多根呈圆周分布的螺柱,螺柱的下端与z向转台固接,螺柱的上端活动穿过调平板,螺柱上螺纹连接有调平螺母,调平螺母的上表面与调平板的下表面抵接。
11.进一步地,x向滑块和y向滑块的下表面均设有横向贯穿的燕尾槽且两个燕尾槽垂直,x向基座和x向滑块的上表面均设有与对应燕尾槽匹配的燕尾凸台,燕尾凸台位于对应燕尾槽内并滑动配合以使x向滑块和y向滑块可横向滑动。
12.进一步地,x向基座与x向滑块内均设有安装腔,安装腔内横向设有蜗杆,蜗杆的杆部延伸至对应的x向基座或x向滑块外;
13.安装腔内还设有与蜗杆啮合的蜗轮,x向滑块的下表面对应x向基座内安装腔的位置以及y向滑块的下表面对应x向滑块内安装腔的位置均设有腰形槽,位于x向滑块上的腰形槽的长度方向与x向滑块的滑动方向垂直,位于y向滑块上的腰形槽的长度方向与y向滑块的滑动方向垂直;腰形槽内活动设有偏心轮,偏心轮的圆周面与对应腰形槽的两平行边相切,偏心轮的下表面竖向凸起形成有偏心轴,偏心轴与对应蜗轮同轴,偏心轴的自由端延伸至对应安装腔内并与对应蜗轮连接。
14.进一步地,设于x向基座内的蜗杆的轴线与x向滑块的滑动方向垂直,设于x向滑块内的蜗杆的轴线与y向滑块的滑动方向相同,设于x向基座内的蜗杆的杆部、设于x向滑块内的蜗杆的杆部和微分头的固定端朝向同一侧。
15.相比现有技术,本实用新型的有益效果如下:
16.本实用新型,通过底座将两个激光测距仪一起安装到掘进机上,底座上的水准泡确保底座安装水平,以保证两个激光测距仪位于同一水平面,在一个激光测距仪与底座之间设置调整架,方便基于另一个激光测距仪通过x向滑块和y向滑块的横向滑动来调整激光测距仪的前后位置和间隔距离,以保证两激光测距仪的发射端齐平和调试该装置的测量范围;方便基于另一激光测距仪通过拧动微分头使z向转台转动,以调整两激光测距仪平行;相较于在掘进机上直接安装激光测距仪,本实用新型所述装置的安装和后续调整都更为简单有效。
附图说明
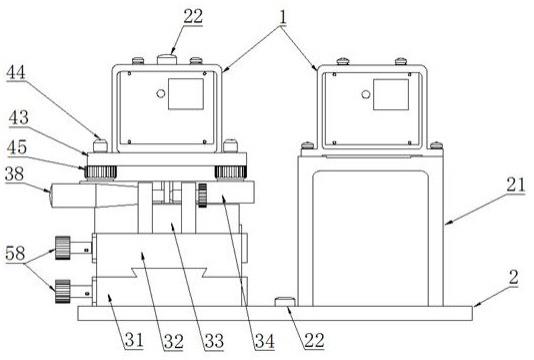
17.图1为实施例所述测距单元的结构示意图;
18.图2为实施例所述调整架和对应激光测距仪的立体示意图;
19.图3为图2的侧视图(局部剖视);
20.图4为图3中a处的放大图;
21.图5为图2的主视图(局部剖视);
22.图6为图5中b处的放大图;
23.图7为图2的俯视图(局部剖视);
24.图8为背景技术中激光测距仪的适应角度与反射面的夹角的关系图;
25.其中,激光测距仪1,底座2,支架21,水准泡22,x向基座31,x向滑块32,y向滑块33,z向转台34,扭簧36,定位板37,微分头38,连接板39,夹紧螺栓41,支板42,调平板43,螺柱44,调平螺母45,燕尾槽46,燕尾凸台47,安装腔51,蜗杆52,蜗轮53,腰形槽54,偏心轮55,偏心轴56,螺钉57,旋钮58,反射面62。
具体实施方式
26.下面结合附图对本实用新型的具体实施方式作进一步的详细说明。
27.实施例:
28.请参见图1,一种用于巷道掘进机找正的装置,包括测距单元,测距单元包括两个激光测距仪1;两个激光测距仪1并排设置在底座2上,一个激光测距仪1与底座2之间设有调整架,底座2上设有水准泡22;
29.请参见图2,调整架包括自下而上依次设置的x向基座31、x向滑块32、y向滑块33和z向转台34,x向基座31固定设于底座2上,x向滑块32与x向基座31滑动配合并可横向滑动,y向滑块33与x向滑块32滑动配合并可横向滑动,且y向滑块33与x向滑块32可横向滑动的方向垂直,z向转台34与y向滑块33转动连接并可水平转动;
30.请参见图2-图4,y向滑块33上设有竖向贯穿的连接孔,z向转台34的下表面对应连接孔的位置具有凸起形成的z向转轴,z向转轴位于连接孔内,z向转轴上套设有扭簧36,扭簧36的两端分别与z向转轴和连接孔的孔壁固连;z向转台34为圆形板结构,z向转台34的圆周面上具有沿径向凸起延伸形成的定位板37,定位板37的一侧设有微分头38,微分头38的固定端与y向滑块33固接,微分头38的伸缩端与定位板37抵接以通过转动微分头38来调整z向转台34的转动幅度。
31.这样,x向基座31用于支持x向滑块32滑动,x向滑块32作为滑动件的同时,也作为y向基座用于支持y向滑块33滑动,x向基座31、x向滑块32和y向滑块33可采用两个丝杠导轨、直线齿条导轨等垂直重叠组合的形式;微分头38为螺旋测微器、千分尺等测量工具上的调节装置,为现有技术;
32.在组装测距单元过程中,将调整架安装在底座2上时,应使调整架中x向滑块32或y向滑块33的滑动方向与另一激光测距仪1的朝向尽可能平行,将对应激光测距仪1安装在z向转台34上时,应使该激光测距仪1与另一激光测距仪1的朝向尽可能平行,且扭簧36储存有一定能量,微分尺的伸缩端与定位板37抵接阻止扭簧36能量的释放;
33.使测距单元在初始状态下,两激光测距仪1就已经平行或近乎平行且调整架的两横向调整方向分别与激光测距仪1的前后位置和间隔距离的调整相对应,由于扭簧36处于带动z向转台34朝微分尺方向旋转的趋势,以避免z向转台34随意转动;从而方便将测距单元安装在掘进机上后,通过拧动微分头38使z向转台34有较小幅度的转动,微调对应激光测
距仪1的朝向,使两个激光测距仪1平行,也方便通过x向滑块32和y向滑块33的横向滑动来调整激光测距仪1的前后位置和间隔距离;通过底座2上的水准泡22方便在测距单元安装到掘进机上时,确保两激光测距仪1位于同一水平面。
34.本实施例中,另一激光测距仪1通过支架21安装在底座2上,支架21与调整架等高,以使该激光测距仪1与通过调整架安装的激光测距仪1的安装高度相等,保证两激光测距仪1位于同一水平面;
35.所述连接孔为两段式阶梯孔,阶梯孔的大径段朝下,z向转轴位于阶梯孔的小径段内,z扭簧36的一端与z向转轴固连,扭簧36的另一端与阶梯孔的孔壁固连;
36.扭簧36的内径与z向转轴匹配,扭簧36的外径与阶梯孔的小径段匹配,以避免因施工过程中掘进机的振动导致z向转轴在阶梯孔的小径段内发生晃动;阶梯孔的大径段内设有连接板39,连接板39与z向转轴固连,且连接板39与阶梯孔内的台阶面抵接,以避免因施工过程中掘进机的振动导致z向转轴从阶梯孔的小径段内向上脱出。
37.扭簧36的两端并非一定需要完全的固定,只需要保证扭簧36可通过z向转轴储存能量和释放能量即可;本实施例中,分别在z向转台和阶梯孔内的台阶面上开设限位槽(图中未示出),扭簧36的两端分别设于对应限位槽内。
38.本实用新型,通过底座2将两个激光测距仪1一起安装到掘进机上,底座2上的水准泡22确保底座2安装水平,以保证两个激光测距仪1位于同一水平面;在一个激光测距仪1与底座2之间设置调整架,方便基于另一个激光测距仪1通过x向滑块32和y向滑块33的横向滑动来调整激光测距仪1的前后位置和间隔距离,以保证两激光测距仪1的发射端齐平和调试该装置的测量范围;方便基于另一激光测距仪1通过拧动微分头38使z向转台34转动,以调整两激光测距仪1平行;相较于在掘进机上直接安装激光测距仪1,本实用新型所述装置的安装和后续调整都更为简单有效。
39.作为优选,请参见图2,定位板37的另一侧设有与微分头38相对的夹紧螺栓41,夹紧螺栓41的杆部末端与定位板37抵接,y向滑块33上对应夹紧螺栓41的位置设有支板42,夹紧螺栓41穿过支板42上的螺纹孔与支板42螺纹连接。
40.这样,通过拧动微分头38调节其伸缩端的伸出长度,微分头38的伸缩端通过定位板37带动z向转台34旋转,以微调对应激光测距仪1的朝向,借助测平行的工具测量两激光测距的平行度,当调整至两激光测距平行后,可通过拧动夹紧螺栓41,使定位板37被夹紧螺栓41和微分头38的伸缩端夹紧固定,以避免z向转台34因掘进机的振动而往复轻微转动,导致测量误差或测量失效。
41.作为优选,请参见图2和图3,z向转台34上设有调平板43,对应的激光测距仪1安装在调平板43上;调平板43与z向转台34之间竖向设有多根呈圆周分布的螺柱44,螺柱44的下端与z向转台34固接,螺柱44的上端活动穿过调平板43,螺柱44上螺纹连接有调平螺母45,调平螺母45的上端与调平板43抵接;位于调平板43上的激光测距仪1上也设有水准泡22;本实施例中,螺柱44的数量为三根。实施时,可在螺柱44的头部与调平板43的上表面之间增加锁紧螺母(图中未示出),用于与调平螺母45对顶锁紧调平后的调平板43,防止调平板43上下窜动。
42.这样,底座2通过水准泡22保证安装水平,但受调整架加工和安装精度的影响,可能出现两个激光测距仪1仍不处于同一水平面或设于调整架上的激光测距仪1歪斜的情况,
进而导致测量误差或测量错误的情况;通过拧动调平螺母45调整调平板43的高度或水平度,配合对应激光测距上的水准泡22和高度测量工具来保证两个激光测距仪1的安装精度。
43.作为优选,请参见图2和图3,x向滑块32和y向滑块33的下表面均设有横向贯穿的燕尾槽46且两个燕尾槽46垂直,x向基座31和x向滑块32的上表面均设有与对应燕尾槽46匹配的燕尾凸台47,燕尾凸台47位于对应燕尾槽46内并滑动配合以使x向滑块32和y向滑块33可横向滑动。
44.这样,x向基座31与x向滑块32以及x向滑块32与y向滑块33的滑动配合采用燕尾槽46和燕尾凸台47配合的限制上下运动,使x向基座31与x向滑块32以及x向滑块32与y向滑块33的连接更加可靠,不会出现上下晃动或向上脱出的情况。
45.作为优选,请参见图5-图7,x向滑块32的下表面与x向基座31上表面滑动配合,y向滑块33的下表面与x向滑块32的上表面滑动配合,x向基座31与x向滑块32内均设有安装腔51,安装腔51内横向设有蜗杆52,蜗杆52的杆部延伸至对应的x向基座31或x向滑块32外;
46.安装腔51内还设有与蜗杆52啮合的蜗轮53,x向滑块32的下表面对应x向基座31内安装腔51的位置以及y向滑块33的下表面对应x向滑块32内安装腔51的位置均设有腰形槽54,位于x向滑块32上的腰形槽54的长度方向与x向滑块32的滑动方向垂直,位于y向滑块33上的腰形槽54的长度方向与y向滑块33的滑动方向垂直;腰形槽54内设有偏心轮55,偏心轮55的圆周面与对应腰形槽54的两长边相切,偏心轮55的下表面竖向凸起形成有偏心轴56,偏心轴56与对应蜗轮53同轴,偏心轴56的自由端延伸至对应安装腔51内并与对应蜗轮53连接;即图5中b和c处采用相同的结构形式,图7中剖视部分为x向滑块32内腰形槽54和对应偏心轮55的位置关系图。
47.本实施例中,蜗轮53通过自下而上穿设的螺钉57与偏心轴56相连;设于x向基座31内的蜗杆52的轴线与x向滑块32的滑动方向垂直,设于x向滑块32内的蜗杆52的轴线与y向滑块33的滑动方向相同,设于x向基座31内的蜗杆52的杆部、设于x向滑块32内的蜗杆52的杆部和微分头38的固定端朝向同一侧;为方便拧动蜗杆52,还在蜗杆52的杆部末端设置带齿的旋钮58。
48.这样,为驱动x向滑块32和y向滑块33均采用上述蜗轮53蜗杆52与凸轮机构结合的形式,转动蜗杆52带动蜗轮53转动,进而带动偏心轮55转动,在偏心轮55与腰形槽54的配合作用下,驱动x向滑块32和y向滑块33滑动;两个垂直交叉组合的滚珠丝杠导轨,调整把手的位置分散,而本实施例中,蜗杆52的朝向不受限制,将蜗杆52的杆部和微分头38的固定端设于调整架远离另一激光测距仪1的一侧,方便安装和调整使用;齿轮齿条导轨的调整精度受齿轮和齿条的尺寸的影响,精度上不如蜗轮53蜗杆52与凸轮机构结合的形式。
49.本实施例所述一种用于巷道掘进机找正的装置在使用时,测距单元安装设于掘进机上,且激光测距仪的朝向与掘进机行进方向相反,反射单元安装在巷道内并与测距单元正对,两反射面的夹角与激光测距仪的朝向相同,该装置测量掘进机横向偏移方向和距离的方法请参见背景技术中所提及的专利。
50.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1