一种铆钉质检设备及其图像及轮廓采集设备的制作方法
1.本实用新型属于铆钉质检技术领域,具体涉及一种铆钉质检设备及其图像及轮廓采集设备。
背景技术:
2.随着社会的发展和科技水平的提高,生活中或生产中所使用到的工具以及电子设备的集成度越来越高,并且随着产品需求增大,对于产品安装牢固性的检测工作也越来越重要。在it、输配电和工业自动化等行业中所用到的设备,在生产制造时的第一步是根据设计来组装电气待检测件部件和配线接线。完成后,对配线接线连接的稳定性、零部件安装的稳固性进行质量进行检测都是必须的。现在的检测方法是:采用质检员进行人工的肉眼观察并记录报告。这种方式的效率低,并且人工检测的结果往往可靠性和可信度不高。
3.因此,有必要设计一种能够对铆钉安装后的产品进行图像和轮廓采集的设备,从而方便于工作人员根据轮廓和图像生成的三维图,从而判断产品上的铆钉是否存在漏铆、错位、歪斜等情况。
技术实现要素:
4.为了解决现有技术中图像和轮廓采集设备存在市场空白的问题,本方案提供了一种铆钉质检设备及其图像及轮廓采集设备。
5.本实用新型所采用的技术方案为:
6.一种铆钉质检用的图像及轮廓采集设备,包括机械手、控制竖轴、固定台、拍摄相机、轮廓扫描仪和治具台;治具台用于待检测件的固定,控制竖轴连接在机械手的控制端,并由所述机械手控制水平移动、竖向移动和转动;所述固定台连接在控制竖轴的下端并与其同步移动;拍摄相机和轮廓扫描仪均设置于固定台上;所述拍摄相机朝下设置并用于待检测件正面的图像采集;所述轮廓扫描仪朝向水平方向并用于待检测件侧面的轮廓识别。
7.可选的:所述固定台包括第一固定台和第二固定台;所述第一固定台和第二固定台均呈板状。
8.可选的:所述第一固定台水平布置并通过连接器与控制竖轴的下端固定连接;轮廓扫描仪固定在第一固定台的下端面。
9.可选的:所述第二固定台垂直连接在第一固定台的侧边处;该拍摄相机固定设置于第二固定台上。
10.可选的:所述第二固定台的下方设置有用于焦距调节的拍摄镜头。
11.可选的:所述拍摄镜头的下方设置有补光光源;所述补光光源朝下补光,以照亮待检测件的正面。
12.可选的:所述治具台呈四边形,在治具台的四个边处分别设置有限位块,限位块的上部高于治具台的上沿。
13.可选的:所述机械手包括有至少两个臂节,且每个臂节均能够沿水平方向转动。
14.一种铆钉质检设备,使用上述的图像及轮廓采集设备进行图像采集。
15.一种铆钉质检设备,使用上述的图像及轮廓采集设备进行轮廓识别。
16.本实用新型的有益效果为:本方案中利用机械手控制所述控制竖轴移动或者转动,从而使得拍摄相机以及轮廓扫描仪进行同步移动,从而提高图像采集以及轮廓识别的速度和效率;同时,本方案中分别由轮廓扫描仪对待检测件的侧面进行轮廓识别,利用拍摄相机进行图像采集,两者互补干扰,简化控制逻辑,降低使用成本。
附图说明
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
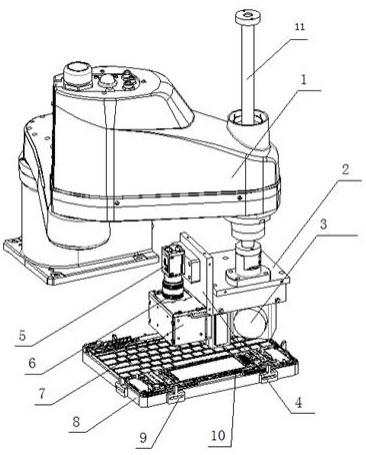
18.图1是本方案中的图像及轮廓采集设备于正面进行图像采集的状态图;
19.图2是本方案中的图像及轮廓采集设备于侧面进行图像采集的状态图;
20.图3是本方案中的图像及轮廓采集设备于另一侧面进行图像采集的状态图。
21.附图说明:1-机械手;2-第一固定台;3-轮廓扫描仪;4-第二固定台;5-拍摄相机;6-拍摄镜头;7-补光光源;8-治具台;9-限位块;10-待检测件;11-控制竖轴。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.实施例1
24.如图1至图3所示,本实施例设计了一种铆钉质检用的图像及轮廓采集设备,包括机械手1、控制竖轴11、固定台、拍摄相机5、轮廓扫描仪3和治具台8等部件。
25.其中,治具台8的作用是是固定待检测件10,并保证在图像采集以及轮廓识别过程中,该待检测件10不发生移位。治具台8呈四边形,在治具台8的四个边处分别设置有限位块9,限位块9的上部高于治具台8的上沿。当待检测件10放置于治具台8的上方时,该位于治具台8四个方向上的限位块9刚好置于待检测件10的四边处,并挡住待检测件10,避免待检测件10从治具台8上滑落或掉落。
26.所述机械手1包括有至少两个臂节,且每个臂节均能够沿水平方向转动。控制竖轴11连接在机械手1的控制端,并由所述机械手1控制水平移动、竖向移动和转动。该机械手1可以使用市购的机械手1产品,只要具有使控制竖轴11沿自身轴向转动、在水平方向能够移动、以及在竖向方向能够升降等功能的机械手1都应当属于本实施例所要保护范围。此外,使用具有以上功能的其他机械结构,也应当视为本实施例所描述的机械手1。
27.所述固定台连接在控制竖轴11的下端并与其同步移动;该固定台包括第一固定台2和第二固定台4;所述第一固定台2和第二固定台4均呈板状。
28.所述第一固定台2水平布置并通过连接器与控制竖轴11的下端固定连接;轮廓扫
描仪3固定在第一固定台2的下端面。该轮廓扫描仪3朝向水平方向并用于待检测件10侧面的轮廓识别。
29.所述第二固定台4垂直连接在第一固定台2的侧边处;该拍摄相机5固定设置于第二固定台4上。拍摄相机5朝下设置并用于待检测件10正面的图像采集。为了提高拍摄相机5对拍摄区域的清晰度和拍摄的广度,在第二固定台4的下方可以设置用于焦距调节的拍摄镜头6。同时,为了保证带检测件在拍摄时的明暗度,可以在所述拍摄镜头6的下方设置补光光源7,该补光光源7可以是led灯或者其他照明设备。该补光光源7朝下补光,以照亮待检测件10的正面。
30.实施例2
31.如图1至图3所示,本实施例设计了一种铆钉质检设备,包括图像及轮廓采集设备和数据处理终端。
32.所述图像及轮廓采集设备,包括机械手1、控制竖轴11、固定台、拍摄相机5、轮廓扫描仪3和治具台8。治具台8用于待检测件10的固定,控制竖轴11连接在机械手1的控制端,并由所述机械手1控制水平移动、竖向移动和转动。所述固定台连接在控制竖轴11的下端并与其同步移动;拍摄相机5和轮廓扫描仪3均设置于固定台上;所述拍摄相机5朝下设置并用于待检测件10正面的图像采集;所述轮廓扫描仪3朝向水平方向并用于待检测件10侧面的轮廓识别。
33.所述数据处理终端通过通信线缆或者控制线缆与机械手1、拍摄相机5和轮廓扫描仪3电连接。数据处理终端能够控制机械手1的移动,从而控制拍摄相机5的图像采集位置和轮廓扫描仪3的轮廓识别位置。此外,该数据处理终端能够接收拍摄相机5和轮廓扫描仪3获取图像和轮廓信息,并通过软件生成三维模型。
34.铆钉质检设备的具体工作流程为:
35.第一步,将待检测件10放置在治具台8上,限位块9对待检测件10的四周限位,然后机械手1启动,先运动至待检测件10的顶部,如图1所示位置,拍摄相机5的镜头中心与待检测件10的中心对齐,并且待检测件10位于拍摄相机5的景深范围内,对待检测件10进行图像采集,通过软件算法确定拍摄镜头6到待检测件10的高度尺寸,确定铆钉圆心位置以及待检测件10外形,并测量出铆钉直径同心度等情况。
36.第二步,机械手1运动到治具台8的一个侧面处,在机械手1的带动下,轮廓扫描仪3指定至指定位置,如图2所示位置,轮廓扫描仪3对待检测件10的侧面进行线扫描,并拟合成一个平面,测量出待检测件10的高度尺寸,再与第一步采集到的图像及尺寸,拟合到对应需要检测的铆钉位置,计算出铆钉位置高度尺寸。
37.第三步,机械手1运动至治具台8的另一个侧面,在机械手1的带动下,轮廓扫描仪3指定至另一指定位置,如图3所示位置,轮廓扫描仪3对待检测件10侧面进行线扫描,并拟合成一个平面,测量出待检测件10的高度尺寸,再与第一步采集到的图像及尺寸,拟合到对应需要检测的铆钉位置,计算出铆钉位置高度尺寸。扫描完待检测件10的四个侧面的轮廓后,最终拟合成一个3d图,测量出所需铆钉的位置,从而判定铆钉是否错位、是否漏铆;判定完成后,将不合格信息推送至数据处理终端的后台和终端显示器上。
38.上述实施例仅仅是为了清楚的说明所做的举例,而并非对实施方式的限定。对于所属领域的技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。
这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1