用于监测水质无人船的加热控制装置的制作方法
1.本实用新型涉及无人船领域,尤其涉及一种用于监测水质无人船的加热控制装置。
背景技术:
2.无人船逐渐应用至生活、生产、科研及水质环境监测等各个领域。无人船水质监测,是采用无人船进行监视和测定水体中污染物的种类、各类污染物的浓度及变化趋势,包括未被污染和已受污染的天然水江、河、湖、海和地下水及各种各样的工业排水等。为客观的评价江河和海洋水质的状况,监测水质有时是有温度要求的,温度满足监测要求,才能够得到更加精确的数据。
3.中国专利cn208239421u公开了一种监测水质无人船用加热装置,包括固定座、波纹管和加热片,所述固定座内设有进水口和出水口,进水口和出水口上设有连接用的凸起,使得进水口可以快速的和进水管连接还不容易断开,出水口与水泵连接不容易断开,多个加热片包裹在波纹管的凸起或者凹陷部位并通过制热器进行加热,越靠近进水口的加热片加热温度越低,越靠近出水口的加热片加热温度越高,使得待监测水源进水口流至出水口时能够充分加热,能够满足监测待监测水源时的温度要求,减少监测时的各项数据误差。此技术方案利用制热器配合多个加热片的加热方案,加热效率较低,将检测水质加热到所需检测温度所需时间较长,导致无人船在监测行驶过程浪费大量的等待时间,工作效率较低,难于满足无人船在行驶过程中快速水质监测的工作要求。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种用于监测水质无人船的加热控制装置,具有结构简单、加热快捷且高效的主要特点。
5.本实用新型提出一种用于监测水质无人船的加热控制装置,该无人船包括船体、设置在船体底部的推进模块、设置在船体上的蓄电池和用于盛放取样水质的测试池;加热控制装置设置在船体上以将取样至测试池的水样快速加热至监测目标温度,其包括:设置在船体底部的取样口和插接在取样口的导流管;磁感加热管,包括进水端和出水端,进水端通过水泵与导流管相连通,出水端与测试池相连通;设置在取样口至进水端之间的温度传感器和流量传感器;电路板,至少包括单片机、与蓄电池相连的逆变电路以及用于驱动磁感加热管的励磁模块,所述单片机用于根据温度传感器和流量传感器的结果计算所需加热功率以确定输出给励磁模块的控制信号。
6.在一个优选实施例中,磁感加热管包括绝缘管、与绝缘管同轴设置的不锈钢管和缠绕在绝缘管外壁并与励磁模块电性连接的磁感线圈,在绝缘管的内壁与不锈钢管之间形成有加热腔,且绝缘管与不锈钢管的两末端采用端盖封装后分别形成与加热腔相连通的进水端和出水端。
7.在一个优选实施例中,在进水端设有检测槽,温度传感器和流量传感器均预埋在
检测槽内。
8.在一个优选实施例中,在船体的两端分别设有第一密封仓和第二密封仓,蓄电池和电路板均设置在第一密封仓内,加热控制装置设置在第二密封仓内。
9.在一个优选实施例中,第一密封仓位于船体的前端,第二密封仓位于船体的后端。
10.与现有技术相比,本实用新型具有如下有益效果:
11.本实用新型的整体结构简单,通过在无人船上采用磁感加热管基于电磁感应加热,能够根据取样水体的流量大小、水样温差来动态调节磁感加热管的加热功率,让磁感加热管能够实时精确的将取样水体加热至所需的监测目标温度,加热快速且加热均匀,可以满足无人船在行驶过程中快速水质监测的快速加热要求。
附图说明
12.图1是无人船的结构示意图,箭头表示无人船在启动后的行驶方向。
13.图2是磁感加热管一个实施例的结构示意图。
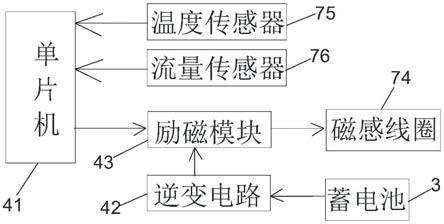
14.图3是加热控制装置一个实施例的结构框图。
具体实施方式
15.为更进一步阐述本技术为达成预定目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本技术的具体实施方式、结构、特征及其功效,详细说明如后。在下述说明中,不同的“一实施例”或“实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构、或特点可由任何合适形式组合。
16.本实用新型提出一种用于监测水质无人船的加热控制装置,以简化整体结构并提高加热效率,旨在满足无人船在行驶过程中快速水质监测的工作要求。
17.如图1所示,一种用于监测水质无人船(又简称“无人船”)至少包括船体1、设置在船体1底部的推进模块2、设置在船体1上的蓄电池3和用于盛放取样水质的测试池14;在船体1上还设有加热控制装置以将取样至测试池14的水样快速加热至监测目标温度t0,该加热控制装置具体包括:设置在船体1底部的取样口13和插接在取样口13的导流管6;磁感加热管7,包括进水端721和出水端722,进水端721通过水泵5与导流管6相连通,出水端722与测试池14相连通;设置在取样口13至进水端721之间的温度传感器75和流量传感器76,以分别检测流入进水端721的取样水样的初始温度t1和流量大小;电路板4,至少包括单片机41、与蓄电池31相连的逆变电路42以及用于驱动磁感加热管7的励磁模块43,由单片机71根据温度传感器75和流量传感器76的结果计算所需加热功率以确定输出给励磁模块43的控制信号。
18.在一个实施例中,磁感加热管7包括绝缘管71、与绝缘管71同轴设置的不锈钢管72和缠绕在绝缘管71外壁并与励磁模块43电性连接的磁感线圈74,在绝缘管71的内壁与不锈钢管72之间形成有加热腔,且绝缘管71与不锈钢管72的两末端采用端盖73封装后分别形成与加热腔相连通的进水端721和出水端722。
19.本实用新型的加热控制装置,其基本的工作原理如下:蓄电池3输出的直流电(通常是+24v),经逆变电路42进行逆变处理并升压到目标幅值的交流电以提供给励磁模块43;励磁模块43根据单片机41发出的控制信号所确定的加热功率,产生对应大小的交变电流给
磁感线圈74,让磁感线圈74产生交变磁场,从而让处于磁场内的不锈钢管72通过电磁感应发热,对流过加热腔内的水样快速的均匀加热。
20.其中,励磁模块43的实施方式也有多种。例如采用中国专利申请cn101825342a公开的技术方案,励磁模块43对应包括变频控制模块和功率电路igbt驱动模块,由单片机根据流量传感器76所检测的水样流量大小、水样温差(监测目标温度t0-初始温度t1)来计算所需加热功率大小,确定变频控制模块对应加热功率所需的驱动频率,从而发出对应加热功率大小的控制信号给变频控制模块以使变频控制模块输出对应加热功率所需的驱动频率至功率电路igbt驱动模块,利用功率电路igbt驱动模块驱动磁感线圈74产生交变磁场以让磁感加热管7产生对应加热功率,能够根据取样水体的流量大小、水样温差来动态调节磁感加热管7的加热功率,让磁感加热管7能够实时精确的将取样水体加热至所需的监测目标温度t0。
21.例如,单片机采用atmel公司出品的型号at89c52的8位单片机,温度传感器75和流量传感器76分别连接在单片机的p0.2端口和p0.3端口,而变频控制模块与单片机的p2.0端口电性连接,由p2.0端口发出控制信号给变频控制模块以控制变频控制模块输出对应加热功率所需的驱动频率至功率电路igbt驱动模块。
22.在一个实施例中,在进水端721设有检测槽723,温度传感器75和流量传感器76均预埋设置在检测槽723内,使得温度传感器75和流量传感器76与磁感加热管7成为一个整体。这种结构利于整体安装与后期维护。
23.在一个实施例中,在船体1的两端分别设有第一密封仓11和第二密封仓12,蓄电池3和电路板4均设置在第一密封仓11内,加热控制装置设置在第二密封仓12内。这种结构让加热控制装置与蓄电池3、电路板4分隔设置,互不影响,有利于确保无人船的整体可靠性。
24.在一个实施例中,第一密封仓11位于船体1的前端,而第二密封仓12的后端,让测试池14的水样经过监测检测后从船体1后端排出,不会影响无人船的航行。
25.综上所述,相比现有技术而言,本实用新型的整体结构简单,通过在无人船上采用磁感加热管基于电磁感应加热,能够根据取样水体的流量大小、水样温差来动态调节磁感加热管7的加热功率,让磁感加热管7能够实时精确的将取样水体加热至所需的监测目标温度t0,加热快速且加热均匀,可以满足无人船在行驶过程中快速水质监测的快速加热要求。
26.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1