激光雷达装置的制作方法
1.本实用新型涉及利用激光获得对象体的距离信息的激光雷达装置。更具体来讲,本实用新型涉及向扫描区域照射激光并感测从位于所述扫描区域上的对象体反射的激光以获得距离信息的激光雷达装置。
背景技术:
2.激光雷达装置(lidar:light detecting and ranging)是利用激光探测与对象体之间的距离的装置。并且,激光雷达装置是能够利用激光生成点云(point cloud)以获得关于位于周边的事物的位置信息的装置。并且,关于利用激光雷达装置的气象观测、三维映射(3d mapping)、自动驾驶车辆、自动驾驶无人机及无人机器人传感器等的研究也在积极进行。
技术实现要素:
3.技术问题
4.本实用新型要解决的技术问题是提供一种包括用于测量基准的固定镜部的激光雷达装置。
5.本实用新型要解决的技术问题不限于所述技术问题,本实用新型所属技术区域的普通技术人员可以从本说明书及附图明确理解未提及的技术问题。
6.技术内容
7.根据本实用新型的一个实施例,可提供一种激光雷达装置,包括:包括外壳及窗口的壳体、位于所述壳体内且用于输出激光的激光输出部、位于所述壳体内且用于感测激光的检测部、位于所述壳体内且为了变更从所述激光输出部输出的激光的飞行路径而以旋转轴为基准旋转的扫描部及位于所述壳体内且用于反射所述扫描部在第一位置时从所述激光输出部输出后被所述扫描部反射的激光的固定镜部,从所述激光雷达装置的上部来看,所述窗口从第一窗口端部延长到第二窗口端部形成,从所述激光雷达装置的上部来看,所述固定镜部从第一镜端部延伸形成到第二镜端部,从所述激光雷达装置的上部来看,连接所述旋转轴和所述第一窗口端部的第一虚拟线及连接所述旋转轴和所述第二窗口端部的第二虚拟线向所述窗口方向具有第一角度,从所述激光雷达装置的上部来看,连接所述旋转轴和所述第一镜端部的第三虚拟线及连接所述旋转轴和所述第二镜端部的第四虚拟线向所述固定镜方向具有第二角度,所述第一角度可大于所述第二角度。
8.根据本实用新型的另一方面,可提供一种激光雷达装置,包括:包括外壳和窗口的壳体、位于所述壳体内且用于输出激光的激光输出部、位于所述壳体内且用于感测激光的检测部、位于所述壳体内且为了变更从所述激光输出部输出的激光的飞行路径而以旋转轴为基准旋转的扫描部及位于所述壳体内且用于反射所述扫描部为第一位置时从所述激光输出部输出并被所述扫描部反射的激光的固定镜部,所述扫描部包括用于变更从所述激光输出部输出的激光的飞行路径的反射面,所述反射面配置成相对于所述旋转轴具有第一预
设角度,所述固定镜部配置成相对于所述旋转轴具有第二预设角度,所述第二预设角度可小于所述第一预设角度。
9.根据本实用新型的又一实施例,可提供一种激光雷达装置,可包括:包括外壳和窗口的壳体、位于所述壳体内且用于输出激光的激光输出部、位于所述壳体内且用于感测激光的检测部、位于所述壳体内且为了变更从所述激光输出部输出的激光的飞行路径而以旋转轴为基准旋转的扫描部及位于所述壳体内且用于反射所述扫描部为第一位置时从所述激光输出部输出并被所述扫描部反射的激光的固定镜部,从所述激光雷达装置的上部来看时,所述激光输出部与所述固定镜部之间的距离小于所述检测部与所述固定镜部之间的距离,从所述激光雷达装置的侧面来看时,所述扫描部在所述第一位置时,所述激光输出部与所述反射面之间的距离大于所述检测部与所述反射面之间的距离,将所述扫描部在所述第一位置旋转180度的位置视为第二位置时,当所述扫描部为所述第二位置时,从所述激光输出部输出的激光在所述扫描部反射并通过所述窗口的第一部分,所述固定镜部的上下方向的位置可能与所述窗口的所述第一部分的上下方向位置不同。
10.本实用新型的技术方案不限于上述技术方案,本实用新型所属技术区域的普通技术人员可以从本说明书及附图明确理解未提及的技术方案。
11.技术效果
12.根据本实用新型的一个实施例,可提供包括用于测量基准的固定镜部的激光雷达装置。
13.本实用新型要解决的技术问题不限于所述技术问题,本实用新型所属技术区域的普通技术人员可以从本说明书及附图明确理解未提及的技术问题。
附图说明
14.图1是用于说明一个实施例的激光雷达装置的示意图;
15.图2是示出根据一个实施例的激光雷达装置的示意图;
16.图3是用于说明一个实施例的激光雷达装置的示意图;
17.图4是用于说明一个实施例的激光雷达装置的示意图;
18.图5是用于说明一个实施例的激光雷达装置中包括的构成要素之间的配置关系、激光照射方向及扫描点的示意图;
19.图6是用于说明另一个实施例的激光雷达装置中包括的构成要素之间的配置关系、激光照射方向及扫描点的示意图;
20.图7是用于说明另一个实施例的激光雷达装置中包括的构成要素之间的配置关系、激光照射方向及扫描点的示意图;
21.图8是一个实施例的激光雷达装置的立体图;
22.图9是一个本实施例的激光雷达装置的平面图;
23.图10及图11是一个实施例的激光雷达装置的侧面图;
24.图12及图13是一个实施例的激光雷达装置的正面图;
25.图14及图15是一个实施例的激光雷达装置的背面图;
26.图16是一个实施例的激光雷达装置的立体图;
27.图17是一个实施例的激光雷达装置的侧面图;
28.图18是一个实施例的激光雷达装置的正面图;
29.图19是一个实施例的激光雷达装置的平面图;
30.图20及图21是一个实施例的激光雷达装置的侧面图。
具体实施方式
31.本说明书记载的实施例用于向本实用新型所属技术区域的普通技术人员明确说明本实用新型的思想,本实用新型不限于本说明书记载的实施例,应理解本实用新型的范围包括不超出本实用新型的思想的修改例或变形例。
32.本说明书中使用的术语是考虑在本实用新型中的功能而尽可能选择的当前广泛使用的术语,但其随着本实用新型所属技术区域的普通技术人员的意图、判例或新技术的出现等而变更。但另外将特定术语定义为任意意思使用的情况下,将会专门记载该术语的意思。因此本说明书中使用的术语并不是单纯的术语的名称,而是应根据该术语所具有的实质性意思及本说明书全篇的内容进行解释。
33.本说明书中的附图旨在容易说明本实用新型,附图中所示的形状可能是为了帮助理解本实用新型而夸张示出的,因此本实用新型不局限于附图。
34.在本说明书中,当判断认为在本实用新型中对公知的构成或功能的具体说明可能会混淆本实用新型的主旨的情况下省略关于其的具体说明。
35.本实用新型一个实施例的激光雷达装置包括:包括外壳及窗口的壳体、位于所述壳体内且用于输出激光的激光输出部、位于所述壳体内且用于感测激光的检测部、位于所述壳体内且为了变更从所述激光输出部输出的激光的飞行路径而以旋转轴为基准旋转的扫描部及位于所述壳体内且用于反射所述扫描部在第一位置时从所述激光输出部输出后被所述扫描部反射的激光的固定镜部,从所述激光雷达装置的上部来看,所述窗口从第一窗口端部延长到第二窗口端部形成,从所述激光雷达装置的上部来看,所述固定镜部从第一镜端部延伸形成到第二镜端部,从所述激光雷达装置的上部来看,连接所述旋转轴和所述第一窗口端部的第一虚拟线及连接所述旋转轴和所述第二窗口端部的第二虚拟线向所述窗口方向具有第一角度,从所述激光雷达装置的上部来看,连接所述旋转轴和所述第一镜端部的第三虚拟线及连接所述旋转轴和所述第二镜端部的第四虚拟线向所述固定镜方向具有第二角度,所述第一角度可大于所述第二角度。
36.其中,所述第一角度可以是180度以上。
37.其中,所述第二角度可以是20度以下。
38.其中,从所述激光雷达装置的上部看时,将被所述第一虚拟线、所述第二虚拟线及所述窗口围成的区域作为第一区域,从所述激光雷达装置的上部来看时,将被所述第三虚拟线、所述第四虚拟线及所述固定镜部围成的区域作为第二区域的情况下,所述固定镜部及所述窗口可配置成所述第一区域和所述第二区域不重叠。
39.其中,从所述激光雷达装置的上部来看时,所述第一区域和所述扫描部重叠的区域的大小可大于所述第二区域和所述扫描部重叠的区域的大小。
40.其中,从所述激光雷达装置的上部来看时,所述扫描部可包括不与所述第一区域及所述第二区域重叠的第三区域。
41.其中,关于所述第一区域的宽度、所述第二区域的宽度及所述第三区域的宽度之
和,从所述激光雷达装置的上部来看时,可以与所述扫描部的宽度相等。
42.其中,所述扫描部的所述第一位置可表示所述扫描部以所述旋转轴为基准旋转时成为特定角度的状态下的位置。
43.本实用新型的一个实施例的激光雷达装置包括:包括外壳和窗口的壳体、位于所述壳体内且用于输出激光的激光输出部、位于所述壳体内且用于感测激光的检测部、位于所述壳体内且为了变更从所述激光输出部输出的激光的飞行路径而以旋转轴为基准旋转的扫描部及位于所述壳体内且用于反射所述扫描部为第一位置时从所述激光输出部输出并被所述扫描部反射的激光的固定镜部,所述扫描部包括用于变更从所述激光输出部输出的激光的飞行路径的反射面,所述反射面配置成相对于所述旋转轴具有第一预设角度,所述固定镜部配置成相对于所述旋转轴具有第二预设角度,所述第二预设角度可小于所述第一预设角度。
44.其中,所述第一预设角度可以是45度。
45.其中,所述第二预设角度可大于0度且小于45度。
46.其中,从所述激光雷达装置的一个方面来看,所述扫描部在所述第一个位置时,所述扫描部的下端部、上端部及所述固定镜部的中心构成的角度为第一角度,所述第二预设角度可小于所述第一角度的一半。
47.本实用新型的一个实施例的激光雷达装置包括:包括外壳和窗口的壳体、位于所述壳体内且用于输出激光的激光输出部、位于所述壳体内且用于感测激光的检测部、位于所述壳体内且为了变更从所述激光输出部输出的激光的飞行路径而以旋转轴为基准旋转的扫描部及位于所述壳体内且用于反射所述扫描部为第一位置时从所述激光输出部输出并被所述扫描部反射的激光的固定镜部,从所述激光雷达装置的上部来看时,所述激光输出部与所述固定镜部之间的距离小于所述检测部与所述固定镜部之间的距离,从所述激光雷达装置的侧面来看时,所述扫描部在所述第一位置时,所述激光输出部与所述反射面之间的距离大于所述检测部与所述反射面之间的距离,将所述扫描部在所述第一位置旋转180度的位置视为第二位置时,当所述扫描部为所述第二位置时,从所述激光输出部输出的激光在所述扫描部反射并通过所述窗口的第一部分,所述固定镜部的上下方向的位置可能与所述窗口的所述第一部分的上下方向位置不同。
48.其中,所述扫描部包括用于变更从所述激光输出部输出的激光的飞行路径的反射面,所述固定镜部的上下方向的位置和所述窗口的所述第一部分的上下方向位置的差异可小于所述反射面的直径值。
49.其中,所述固定镜部的上下方向的位置可根据通过所述第一部分的激光的中心与所述第一部分的交汇点进行定义。
50.其中,所述窗口的所述第一部分的上下方向位置可根据通过所述第一部分的激光的中心和所述第一部分的交汇点进行定义。
51.1.激光雷达装置及术语整理
52.激光雷达装置是用于利用激光探测到对象体的距离及对象体的位置的装置。例如,激光雷达装置可输出激光,输出的激光被对象体反射的情况下可接收被反射的激光以测量对象体和激光雷达装置之间的距离及对象体的位置。在此,对象体的距离及位置可以通过坐标系来表示。例如,对象体的距离和位置可通过球坐标系表示。但不限于
此,也可以通过正交坐标系(x,y,z)或圆柱坐标系(r,θ,z)等表示。
53.并且,激光雷达装置为了测量对象体的距离而可以利用从激光雷达装置输出后被对象体反射的激光。
54.一个实施例的激光雷达装置为了测量对象的距离而可以利用激光输出后直至被感测到为止的飞行时间(tof:time of flight)。例如,激光雷达装置可利用基于输出的激光的输出时间的时间值和基于被对象体反射而感测到的激光的感测时间的时间值之差测量对象体的距离。
55.并且,一个实施例的激光雷达装置为了测量对象体的距离,除了所述飞行时间外还可以利用三角测量法(triangulation method)、干涉仪方法(interferometry method)、相移测量法 (pahse shift method)等,但不限于此。
56.2.激光雷达装置的构成
57.以下详细说明激光雷达装置的构成要素的多种实施例。
58.图1是用于说明一个实施例的激光雷达装置的示意图。
59.参见图1,一个实施例的激光雷达装置1000可包括激光输出部100。
60.在此,一个实施例的激光输出部100可射出激光。
61.并且,所述激光输出部100还可以包括一个以上的激光输出元件。例如,所述激光输出部 100可包括单个激光输出元件,也可以包括多个激光输出元件,并且,包括多个激光输出元件时,所述多个激光输出元件可构成一个阵列。
62.并且,所述激光输出部100还可以包括激光二极管(laser diode:ld)、固态激光器(solid
‑ꢀ
state laser)、高功率激光器(high power laser)、发光二极管(light entitling diode,led)、垂直腔面发射激光器(vertical cavity surface emitting laser:vcsel)、外腔二极管激光器(externa l cavity diode laser,ecdl)等,但不限于此。
63.并且,所述激光输出部100可输出一定波长的激光。例如,所述激光输出部100可输出905 nm带域的激光或1550nm带域的激光。并且,例如,所述激光输出部100可以输出940nm带域的激光。并且,例如,所述激光输出部100可以输出包括800nm到1000nm之间的多个波长的激光。并且,当所述激光输出部100包括多个激光输出元件的情况下,所述多个激光输出元件的一部分可输出905nm带域的激光,其他部分可以输出1550nm带域的激光。
64.重新参见图1,一个实施例的激光雷达装置1000可以包括扫描部200。
65.在此,一个实施例的扫描部200可以变更激光的飞行路径。例如,所述扫描部200可以变更激光的飞行路径使得从所述激光输出部100射出的激光朝向扫描区域。并且,例如,可变更激光的飞行路径使得被位于所述扫描区域内的对象体反射的激光朝向检测部。
66.并且,一个实施例的扫描部200可通过反射激光变更所述激光的飞行路径。例如,所述扫描部200可反射从所述激光输出部100射出的激光以变更激光的飞行路径使得激光朝向扫描区域。并且,例如,可变更激光的飞行路径使得从位于所述扫描区域内的对象体反射的激光朝向检测部。
67.并且,一个实施例的扫描部200为了反射激光而可以包括多种光学机构。例如,所述扫描部200可包括反射镜(mirror)、共振扫描器(resonance scaner)、微机电镜(mems mirror)、音圈电机(vocie coil motor,vcm)、多面反射镜(polygonal mirror)、旋转反射
镜(rotating mirror) 或电流镜(galvano mirror)等,但不限于此。
68.并且,一个实施例的扫描部200可以折射激光变更所述激光的飞行路径。例如,所述扫描部200可以折射从所述激光输出部100射出的激光变更激光的飞行路径使得激光朝向扫描区域。并且,例如,可以变更激光的飞行路径使得从位于所述扫描区域内的对象体反射的激光朝向检测部。
69.并且,一个实施例的扫描部200为了折射激光而可以包括多种光学机构。例如,所述扫描部200可以包括透镜(lens)、棱镜(prism)、微透镜(micro lens)或液体透镜(microfluidie lens)等,但不限于此。
70.并且,一个实施例的扫描部200可通过变更激光的相位变更激光的飞行路径。例如,所述扫描部200可通过变更从所述激光输出部100射出激光的相位变更激光的飞行路径使得激光朝向扫描区域。并且,例如,可以变更激光的飞行路径使得从位于所述扫描区域内的对象体反射的激光朝向检测部。
71.并且,一个实施例的扫描部200为了变更激光的相位而可以包括多种光学机构。例如,所述扫描部200可包括光学相控阵(optical phased array,opa)、元透镜(meta lens)或元表面(me ta surface)等,但不限于此。
72.并且,一个实施例的扫描部200可以包括一个以上的光学机构。并且,例如,所述扫描部 200可包括多个光学机构。
73.重新参见图1,一个实施例的激光雷达装置100可以包括检测部300。
74.在此,一个实施例的检测部300可感测激光。例如,所述检测部可感测被位于扫描区域内的对象体反射的激光。
75.并且,一个实施例的检测部300可以接收激光,可基于接收到的激光生成电子信号。例如,所述检测部300可以接收被位于扫描区域内的对象体反射的激光,并基于此生成电子信号。并且,例如,所述检测部300可以通过所述扫描部接收被位于扫描区域内的对象体反射的激光,并基于此生成电子信号。
76.并且,一个实施例的检测部300可根据生成的电子信号感测激光。例如,所述检测部可通过比较预先设定的门限值和生成的电子信号的大小感测激光,但不限于此。
77.并且,一个实施例的检测部300可以包括多种传感器元件。例如,所述检测部300可包括p n光电二极管、光电晶体管、pin光电二极管、雪崩光电二极管(avalanche photodiode,apd)、单光子雪崩二极管(single-photon avalanche diode,spad)、硅光电放大器(silicon photo mult ipliers,sipm)、互补金属氧化物半导体(complementary metal
–
oxide
–
semiconductor,cmos) 或电荷耦合元件(charge coupled device,ccd)等,但不限于此。
78.并且,一个实施例的检测部300可以包括一个以上的传感器元件。例如,所述检测部300 可以包括单个传感器元件,也可以包括多个传感器元件。
79.重新参见图1,一个实施例的激光雷达装置1000可以包括控制部400。
80.在此,一个实施例的控制部400可以控制所述激光输出部100、所述扫描部200或所述检测部300的动作。
81.并且,一个实施例的控制部400可以控制所述激光输出部100的动作。
82.例如,所述控制部400可以控制从所述激光输出部100输出激光的输出时间。并且,
所述控制部400还可以控制从所述激光输出部100输出的激光的功率。并且,所述控制部400可以控制所述激光输出部100输出的激光脉冲宽度(pulse width)。并且,所述控制部400可以控制从所述激光输出部100输出的激光的周期。并且,所述激光输出部100包括多个激光输出元件的情况下,所述控制部400可以控制所述激光输出部100使得所述多个激光输出元件中的一部分工作。
83.并且,一个实施例的控制部400可以控制所述扫描部200的动作。
84.例如,所述控制部400可以控制所述扫描部200的动作速度。具体来说,所述扫描部200包括旋转镜的情况下,可以控制所述旋转镜的旋转速度,所述扫描部200包括微机电镜(memsmirror)的情况下,可控制所述mems镜的重复周期,但不限于此。
85.并且,例如,所述控制部400可以控制所述扫描部200的动作程度。具体来说,所述扫描部200包括mems镜时,可以控制所述mems镜的动作角度,但不限于此。
86.并且,一个实施例的控制部400可以控制所述检测部300的动作。
87.例如,所述控制部400可以控制所述检测部300的灵敏度。具体来说,所述控制部400可以通过调整预先设定的门限值来控制所述检测部300的灵敏度,但不限于此。
88.并且,例如,所述控制部400可以控制所述检测部300的动作。具体来说,所述控制部400 可以控制所述检测部300的开/关(on/off),所述检测部300包括多个传感器元件的情况下,可以控制所述检测部300的动作使得所述多个传感器元件中的一部分传感器元件工作。
89.并且,一个实施例的控制部400可以根据所述检测部300感测到的激光判断从所述激光雷达装置1000到位于扫描区域内的对象体的距离。
90.例如,所述控制部400可以根据所述激光输出部100输出激光的时间点和所述检测部300感测到激光的时间点判断到位于扫描区域内的对象体的距离。
91.具体来说,所述激光输出部100可以输出激光,所述控制部分400可获取所述激光输出部1 00输出激光的时间点,所述激光输出部100输出的激光被位于扫描区域内的对象体反射的情况下,所述检测部300可感测到被所述对象体反射的激光,所述控制部400可获取所述检测部300 感测到激光的时间点,所述控制部4000可基于所述激光的输出时间点和感测时间点判断到位于所述扫描区域内的对象体的距离。
92.图2是示出一个实施例的激光雷达装置的示意图。
93.参见图2,一个实施例的激光雷达装置1100可包括激光输出部100、扫描部210及检测部30 0。
94.所述激光输出部100及所述检测部300已在图1进行了说明,因此以下省略关于所述激光输出部100及所述检测部300的详细说明。
95.一个实施例的扫描部210可以是所述扫描部200的一个实现例。例如,所述扫描部210可以反射从所述激光输出部100输出的激光以变更激光的飞行路径收到激光朝向扫描区域。
96.并且,所述扫描部210可以包括旋转镜。
97.并且,所述激光雷达装置1100可以具有照射路径,即从所述激光输出部100输出的激光到达位于扫描区域内的对象体500的光路径。
98.具体来说,所述激光输出部100输出的激光可被所述扫描部210获得。并且,被所述
扫描部210获得的激光被所述扫描部210反射从而被变更飞行路径以朝向扫描区域。并且,被所述扫描部210反射的激光可以达到所述对象体500。
99.并且,所述激光雷达装置1100可以具有受光路径,即被所述对象体500反射的激光到达所述检测部300的光路径。
100.具体来说,被所述对象体500反射的激光可被所述扫描部210获得。并且,被所述扫描部2 10获得的激光被所述扫描部210反射而被变更飞行路径从而朝向所述检测部300。并且,被所述扫描部210反射的激光可到达所述检测部300。
101.并且,包括在所述激光雷达装置1100的所述照射路径中的所述扫描部210的一部分和包括在所述受光路径中的所述扫描部210的一部分可相同,也可不同,也可相互部分重叠,但不限于此。
102.3.激光雷达装置的多种实施例
103.图3和图4是用于说明一个实施例的激光雷达装置的示意图。
104.参见图3及图4,一个实施例的激光雷达装置可包括激光输出部120、扫描部220、检测部3 20。
105.所述激光输出部120及所述检测部320在图1中已经进行了说明,因此以下省略关于所述激光输出部120及所述检测部320的详细说明。
106.一个实施例的扫描部220可包括反射面221和旋转电机222。
107.在此,一个实施例的反射面221可获得激光并反射。例如,所述反射面221可获得从所述激光输出部120输出的激光并向扫描区域反射。并且,例如,所述反射面221可获得被对象体反射的激光并向所述检测部320反射。
108.并且,一个实施例的反射面221可以配置成相对于所述旋转电机222的旋转轴223具有一定角度。例如,所述反射面221可配置成相对于所述旋转电机222的所述旋转轴223具有45度角。
109.并且,一个实施例的反射面221可以变更从激光输出部120输出的激光的飞行路径。例如,如图3所示,所述激光输出部120配置成输出的激光的飞行路径沿垂直方向,所述反射面221可配置成相对于所述旋转轴223具有45度角,在这种情况下,从所述激光输出部120输出并沿着垂直方向飞行的激光被所述反射面221反射而被变更飞行路径从而沿着水平方向飞行。
110.并且,一个实施例的反射面221可以通过所述旋转电机222进行旋转。具体来说,所述反射面221可以以所述旋转电机222的所述旋转轴223为基准旋转。
111.并且,一个实施例的反射面221可以根据旋转角度将从所述激光输出部120输出的激光的飞行路径变更为其他方向。例如,所述反射面221为旋转到如图3所示的角度的状态的情况下,从所述激光输出部120输出并沿着垂直方向飞行的激光可被所述反射面221反射而被变更飞行路径以沿着水平的左方向飞行。与此相反,虽然图中没有示出,但是在所述反射面221为在图 3所示的状态下以所述旋转轴223为基准旋转了180度的状态的情况下,从所述激光输出部120 输出并沿着垂直方向飞行的激光可被所述反射面221反射而被变更飞行路径以沿着水平的右方向飞行。
112.再次参考图3,一个实施例的激光输出部120可以输出激光,并且可配置成输出的所述激光入射到所述反射面221。
113.例如,如图3所示,一个实施例的激光输出部120可配置在所述反射面221上部。
114.并且,例如,虽然图3没有示出,但是所述激光输出部120还可以包括固定镜,所述固定镜配置在所述反射面221上部,所述激光输出部120可配置成输出的所述激光能够入射到所述反射面221。
115.并且,所述激光输出部120可配置成与所述旋转轴223相隔。
116.并且,虽然没有在图3示出,但所述激光输出部120可配置成对应于所述旋转轴223。
117.重新参见图3,一个实施例的检测部320可获得激光,并且可配置成被位于扫描区域内的对象体反射的激光被所述反射面221反射的情况下能够获得被所述反射面221反射的激光。
118.例如,如图3所示,一个实施例的检测部320可配置在所述反射面221上部。
119.并且,例如,虽然没有在图3示出,但是所述检测部320还可以包括固定镜,所述固定镜配置在所述反射面221上部,所述检测部320可以配置成被所述反射面221反射的激光入射到所述检测部320。
120.并且,从所述检测部320可以配置成对应所述旋转轴223。
121.并且,虽然没有在图3示出,但所述检测部320可以配置成与所述旋转轴223相隔。
122.并且,所述激光输出部120配置成与所述旋转轴223相隔的情况下,从所述激光输出部120 输出的激光入射到所述反射面221的位置可随着所述反射面221的旋转而发生变化。
123.并且,如果所述检测部320配置成对应所述旋转轴223的情况下,所述检测部320获得的激光被所述反射面221反射时,在所述反射面221反射的位置可以在所述反射面221旋转时也不变更。
124.并且,所述激光雷达设备1200可包括所述激光输出部120和所述检测部320,所述激光雷达装置1200为了使得被所述检测部320获得的激光的中心是一定的,以最大化受光效率,所述检测部320配置成对应所述旋转轴223,为了防止所述激光输出部120妨碍所述检测部320获得的激光,所述激光输出部120可配置成与所述旋转轴223相隔。
125.3.1一个实施例的激光雷达装置的配置和扫描点
126.图5是用于说明一个实施例的激光雷达装置中包括的构成要素之间的配置关系、激光的照射方向和扫描点的示意图。
127.在说明图5之前,为了方便说明,可以定义术语,可定义方向、扫描点、激光雷达装置的原点等。
128.并且,本章可以利用坐标系来定义方向。
129.例如,以正交坐标系(x,y,z)为基准,将+x方向定义为前方时,可以将-x方向定义为后方,将+y方向定义为右侧方向,将-y方向定义为左侧方向,将+z方向定义为上方,将-z方向定义为下方,本章将利用此进行记述。并且,此时前方可以对应激光雷达装置输出的多个激光的中心。
130.并且,本章可以将激光雷达装置照射的激光生成的点定义为扫描点,所述扫描点的位置可用θ表示。在此,θ可表示连接激光雷达装置的原点和所述扫描点的线与+x轴构成的角度,但不限于此。
131.并且,激光雷达装置的原点是用于表示所述扫描点的位置的假想点,可以任意设定。例如,所述激光雷达装置的原点可以被设置为对应包含于扫描部的反射面的中心,但不限于此。
132.参见图5,一个实施例的激光雷达装置可包括激光输出部120、扫描部220和检测部320。
133.并且,所述扫描部220可以以旋转轴为中心旋转。
134.在此,所述扫描部220可以旋转成第一状态2010、第二状态2020和第三状态2030。
135.并且,参见图5,可以确认所述第一状态2010、第二状态2020和第三状态2030时的平面图 2000和正面图2100。
136.在此,可以参见所述平面图2000和所述正面图2100说明所述激光雷达装置中包括的所述激光输出部120、所述扫描部220和所述检测部320之间的配置关系。
137.并且,参见所述平面图2000,所述激光输出部120可以以所述扫描部220的旋转轴为基准配置在后方。并且,所述检测部320可以配置成对应所述扫描部220的旋转轴。
138.并且,参见所述正面图2100,所述激光输出部120可以以所述扫描部220为基准配置在上部。并且,所述检测部320可以以所述扫描部220为基准配置在上部。
139.因此,所述激光输出部120以所述扫描部220为基准配置在上部,并且可以以所述扫描部2 20的旋转轴为基准配置在后方。并且,从所述检测部320以所述扫描部220为基准配置在上面,并且可配置成与所述扫描部220的旋转轴对应。
140.并且,参见所述第一状态2010的所述平面图2000,所述激光输出部120输出的激光可被所述扫描部220反射而向左侧方向照射。
141.并且,参见所述第一状态2010的所述正面图2100,所述激光输出部120输出的激光朝下输出,可被所述扫描部220反射而向左侧方向进行照射。
142.并且,参见所述第一状态2010的所述平面图2000和所述正面图2100,从所述激光输出部1 20输出的激光从上面看,入射到与所述扫描部220的中心相隔的部分,从正面看,可以入射到对应于所述扫描部220的中心的部分。
143.并且,在所述第一状态2010下从所述激光输出部120输出的激光可生成扫描点2210,参见扫描平面2200,从所述激光输出部120输出并被所述扫描部220反射的激光可以在-90度附近的位置生成扫描点2210。
144.具体来说,在所述第一状态下从所述激光输出部120输出的激光从正面看,随着入射到与所述扫描部220的中心对应的部分,所述激光可以在所述扫描平面2200的z方向中心位置生成扫描点2210。
145.并且,参见所述第二状态2020的所述平面图2000,从所述激光输出部120输出的激光可被所述扫描部220反射而前方进行照射。
146.并且,参见所述第二状态2020的所述正面图2100,所述激光输出部120输出的激光向下方向输出,可被所述扫描部220反射并向前方进行照射。
147.并且,参见所述第二状态2020的所述平面图2000和所述正面图2100,从所述激光输出部1 20输出的激光从上面看,入射到与所述扫描部220的中心相隔的部分,从正面看,可以入射到对应所述扫描部220的中心的部分。
148.并且,在所述第二状态2020下从所述激光输出部120输出的激光可以生成扫描点
2220,参见所述扫描平面2200,从所述激光输出部120输出并被所述扫描部220反射的激光可以在0度附近的位置生成扫描点2220。
149.具体来说,在所述第二状态2020下,从所述激光输出部120输出的激光从正面看,入射到从所述扫描部220的中心向上方相隔的部分,因此所述激光可在所述扫描平面2200的+z方向位置生成扫描点2220。
150.并且,参见所述第三状态2030的所述平面图2000,从所述激光输出部120输出的激光可从所述扫描部220反射并向右侧方向进行照射。
151.并且,参见所述第三状态2030的所述正面图2100,从所述激光输出部120输出的激光朝下输出,可从所述扫描部220反射而向右侧方向进行照射。
152.并且,参见所述第三状态2030的所述平面图2000和上正面图2100,从所述激光输出部120 输出的激光从上面看,入射到与所述扫描部220的中心相隔的部分,从正面看,可以入射到对应所述扫描部220的中心的部分。
153.并且,在所述第三状态2030下,从所述激光输出部120输出的激光可以生成扫描点2230,参见所述扫描平面2200,从所述激光输出部120输出并在所述扫描部220反射的激光可以在+90 度附近的位置生成扫描点2230。
154.具体来说,在所述第三状态2030下,从所述激光输出部120输出的激光从正面看,入射到对应所述扫描部220的中心的部分,因此所述激光可以在所述扫描平面2200的z方向中心位置生成扫描点2230。
155.3.2另一实施例的激光雷达装置的配置和扫描点
156.图6是用于说明另一实施例的激光雷达装置中包括的构成要素之间的配置关系、激光的照射方向和扫描点的示意图。
157.用于说明图6的术语的定义已经通过图5进行了说明,因此省略详细的说明。
158.参见图6,一个实施例的激光雷达装置可包括激光输出部120、扫描部220及检测部320。
159.并且,所述扫描部220可以以旋转轴为中心旋转。
160.此时,所述扫描部220可旋转成第一状态2310、第二状态2320和第三状态2330。
161.并且,参见图6,可以确认所述第一状态2310、第二状态2320和第三状态2330下的平面图 2300和正面图2400。
162.在此,参见所述平面图2300和上面的正面图2400,可以说明所述激光雷达装置中包括的所述激光输出部120、所述扫描部220和所述检测部320之间的配置关系。
163.并且,参见所述平面图2300,所述激光输出部120可以以所述扫描部220的旋转轴为基准配置在前方。并且,所述检测部320可以配置成对应所述扫描部220的旋转轴。
164.并且,参见所述正面图2400,所述激光输出部120可以以所述扫描部220为基准配置在上部。并且,从所述检测部320可以以所述扫描部220为基准配置在上部。
165.因此,所述激光输出部120以所述扫描部220为基准配置在上部,可以以所述扫描部220的旋转轴为基准配置在前方。并且,所述检测部320以所述扫描部220为基准配置在上部,可以配置成对应所述扫描部220的旋转轴。
166.并且,参见所述第一状态2310的所述平面2300,所述激光输出部120输出的激光可被所述扫描部220反射向左侧方向进行照射。
167.并且,参见所述第一状态2310的所述正面图2400,从所述激光输出部120输出的激光向下方向输出,可被所述扫描部220反射向左侧方向进行照射。
168.并且,参见所述第一状态2310的所述平面图2300和所述正面图2400,从所述激光输出部1 20输出的激光从上面看,入射到与所述扫描部220的中心相隔的部分,从正面看,可以入射到对应所述扫描部220的中心的部分。
169.并且,在所述第一状态2310下,从所述激光输出部120输出的激光可以生成扫描点2510,参见扫描平面2500,从所述激光输出部120输出并被所述扫描部220反射的激光可以在-90度附近的位置生成扫描点2510。
170.具体来说,在所述第一状态下,从所述激光输出部120输出的激光从正面看入射到与所述扫描部220的中心对应的部分,因此,所述激光可以在所述扫描平面2500的z方向中心位置生成扫描点2510。
171.并且,参见所述第二状态2320的上述平面图2300,从所述激光输出部120输出的激光可被所述扫描部220反射并向前方进行照射。
172.并且,参见所述第二状态2320的所述正面图2400,从所述激光输出部120输出的激光朝下输出,可被所述扫描部220反射并向前方进行照射。
173.并且,参见所述第二状态2320的所述平面图2300和所述正面图2400,从所述激光输出部1 20输出的激光从上面看,入射到与所述扫描部220的中心相隔的部分,从正面看,可以入射到对应所述扫描部220的中心的部分。
174.并且,在所述第二状态2320,从所述激光输出部120输出的激光可以生成扫描点2520,参见所述扫描平面2500,从所述激光输出部120输出并被所述扫描部220反射的激光可以在0度附近的位置生成扫描点2520。
175.具体来说,在所述第二状态2320下,从所述激光输出部120输出的激光从正面看,入射到从所述扫描部220的中心向下方相隔的部分,因此所述激光可在所述扫描平面2500的-z方向位置生成扫描点2520。
176.并且,参见所述第三状态2330的所述平面图2300,从所述激光输出部120输出的激光可被所述扫描部220反射而向右侧方向进行照射。
177.并且,参见所述第三状态2330的所述正面图2400,从所述激光输出部120输出的激光朝下输出,可从所述扫描部220反射向右侧方向进行照射。
178.并且,参见所述第三状态2330的所述平面图2300和所述正面图2400,从所述激光输出部1 20输出的激光从上面看,入射到与所述扫描部220的中心相隔的部分,从正面看,可以入射到对应所述扫描部220的中心的部分。
179.并且,在所述第三状态2330下,从所述激光输出部120输出的激光可以生成扫描点2530,参见所述扫描平面2500,从所述激光输出部120输出并被所述扫描部220反射的激光可以在+90 度附近的位置生成扫描点2530。
180.具体来说,在所述第三状态2330下,从所述激光输出部120输出的激光从正面看,入射到对应所述扫描部220的中心的部分,因此所述激光可在所述扫描平面2500的z方向中心位置生成扫描点2530。
181.3.3另一实施例的激光雷达装置的配置和扫描点
182.图7是用于说明另一实施例的激光雷达装置中包括的构成要素之间的配置关系、
激光的照射方向和扫描点的示意图。
183.用于说明图7的术语的定义已经通过图5进行了说明,因此省略详细的说明。
184.参见图7,一个实施例的激光雷达装置可包括激光输出部120、扫描部220、检测部320。
185.并且,所述扫描部220可以以旋转轴为中心旋转。
186.此时,所述扫描部220可旋转成第一状态2610、第二状态2620和第三状态2630。
187.并且,参见图7,可以确认所述第一状态2610、第二状态2620和第三状态2630下的平面图 2600和正面图2700。
188.在此,参见所述平面图2600和所述正面图2700,可以说明所述激光雷达装置中包括的所述激光输出部120、所述扫描部220和所述检测部320之间的配置关系。
189.并且,参见所述平面图2600,所述激光输出部120可以以所述扫描部220的旋转轴为基准配置在右侧方向。并且,所述检测部320可以配置成对应所述扫描部220的旋转轴。
190.并且,参见所述正面图2600,所述激光输出部120可以以所述扫描部220为基准配置在上部。并且,所述检测部320可以以所述扫描部220为基准配置在上部。
191.因此,所述激光输出部120以所述扫描部220为基准配置在上部,可以以所述扫描部220的旋转轴为基准配置在右侧方向。并且,所述检测部320以所述扫描部220为基准配置在上部,可以配置成对应于所述扫描部220的旋转轴。
192.并且,参见所述第一状态2610的所述平面图2600,所述激光输出部120输出的激光可从所述扫描部220反射而向左侧方向进行照射。
193.并且,参见所述第一状态2610的所述正面图2700,所述激光输出部120输出的激光朝下输出,可从所述扫描部220反射而向左侧方向进行照射。
194.并且,参见所述第一状态2610的所述平面图2600和所述正面图2700,从所述激光输出部1 20输出的激光从上面看,入射到与所述扫描部220的中心相隔的部分,从正面看,可以入射到从所述扫描部220的中心向上方向相隔的部分。
195.并且,在所述第一状态2610下从所述激光输出部120输出的激光可以生成扫描点2810,参见扫描平面2800,从所述激光输出部120输出并被在所述扫描部220反射的激光可以在-90度附近的位置生成扫描点2810。
196.具体来说,在所述第一状态下,从所述激光输出部120输出的激光从正面看,入射到从所述扫描部220向上方相隔的部分,因此所述激光可以在向所述扫描平面2800的+z方向相隔位置生成扫描点2810。
197.并且,参见所述第二状态2620的所述平面图2600,从所述激光输出部120输出的激光可被所述扫描部220反射而向前方进行照射。
198.并且,参见所述第二状态2620下的所述正面图2600,从所述激光输出部120输出的激光朝下输出,可被所述扫描部220反射而向前方进行照射。
199.并且,参见所述第二状态2620的所述平面图2600和所述正面图2700,从所述激光输出部1 20输出的激光从上面看,入射到与所述扫描部220的中心相隔的部分,从正面看,可以入射到从所述扫描部220的中心向右侧方向相隔的部分。
200.并且,在所述第二状态2620下,从所述激光输出部120输出的激光可以生成扫描点2820,参见所述扫描平面2800,从所述激光输出部120输出并被所述扫描部220反射的激光
可以在0度附近的位置生成扫描点2820。
201.具体来说。在所述第二状态下,从所述激光输出部120输出的激光从正面看,入射到对应于所述扫描部220的上下中心的部分,因此所述激光可以在对应于所述扫描平面2800z方向中心的位置生成扫描点2820。
202.并且,参见所述第三状态2630的所述平面图2600,所述激光输出部120输出的激光可被所述扫描部220反射而向右侧方向进行照射。
203.并且,参见所述第三状态2630的所述正面图2600,所述激光输出部120输出的激光朝下输出,可从所述扫描部220反射而向右侧方向进行照射。
204.并且,参见所述第三状态2630的所述平面图2600和所述正面图2700,从所述激光输出部1 20输出的激光从上面看,入射到与所述扫描部220的中心相隔的部分,从正面看,可以入射到从所述扫描部220的中心向下方相隔的部分。
205.并且,在所述第三状态2630下,从所述激光输出部120输出的激光可以生成扫描点2830,参见所述扫描平面2800,从所述激光输出部120输出并被所述扫描部220反射的激光可以在+90 度附近的位置生成扫描点2830。
206.具体来说,在所述第三状态下,从所述激光输出部120输出的激光从正面看,入射到向所述扫描部220的下方向相隔的部分,因此所述激光可以在向所述扫描平面2800的-z方向相隔的位置生成扫描点2830。
207.如图5至图7所述,所述激光输出部120配置成与所述扫描部220的所述旋转轴相隔的情况下,通过所述激光输出部120的配置及所述扫描部220的旋转,扫描点的生成位置还向z方向变化。因此有必要考虑所述激光雷达装置的使用目的及效果等,考虑有效的激光输出部120的配置。
208.例如,为了最小化扫描点之间的向扫描平面的z方向相隔的程度,优选的是激光输出部从上面看,以扫描部的旋转轴为基准配置在前方或后方。
209.并且,例如,为了弥补地面倾斜的程度,可优选激光输出部从上面看,以扫描部的旋转轴为基准配置在左侧或右侧。
210.4.激光雷达装置的多种实施例
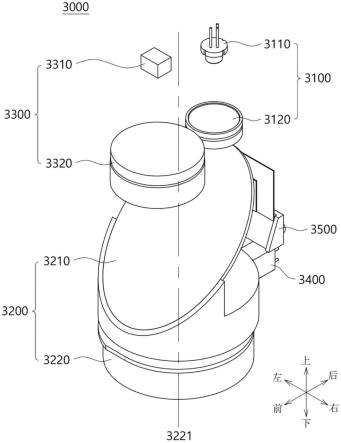
211.图8是一个实施例的激光雷达装置的立体图。
212.参见图8,一个实施例的激光雷达装置3000可包括激光输出部3100、扫描部3200、检测部 3300、角度测量部3400及固定镜部3600。
213.并且,所述激光输出部3100可以包括激光输出装置3110和照射透镜3120,但不限于此。
214.并且,所述扫描部3200可以包括反射面3210和旋转电机3220,但不限于此。
215.并且,所述检测部3400可包括检测器3310和受光透镜3320,但不限于此。
216.并且,对于所述激光输出部3100、扫描部3200和检测部3300,可以适用上述内容,因此重复的叙述将省略。
217.并且,所述角度测量部3400可以测量所述扫描部3200的旋转角度。
218.并且,所述角度测量部3400可以以光耦合器、光反射器、编码器等形态提供,但不限于此。
219.并且,所述固定镜部3500可以是用于测量至少一个关于距离测量的基准的部件。
220.例如,可利用从所述激光输出部3100输出并被所述固定镜部3500反射后被所述检测部330 0获得的激光的时间和强度信息,获得至少关于距离测量的基准信息,但不限于此。
221.更具体来讲,可以将从所述激光输出部3100输出并被所述固定镜部3500获得的激光的第一光路径、从所述固定镜部3500反射后被所述检测部获得的激光的第二光路径设为基准光路径长度,此时,可获得从用于所述激光输出部3100输出激光的触发信号的发生时间点和所述激光被所述检测部3300获得的感测时间点之间的时间间隔获得的基准测量距离,可根据所述基准光路径长度和所述基准测量距离之差获得基准校正值,但不限于此。
222.并且,更具体的例子是可根据从所述激光输出部3100输出并被所述固定镜部3500反射后被所述检测部3300获得的激光的强度(intensity)信息获得反射率/激光功率的表,但不限于此。
223.图9是一个实施例的激光雷达装置的平面图。
224.参见图9,一个实施例的激光雷达装置3000可包括激光输出部3100、扫描部3200、检测部 3300、角度测量部3400、固定镜部3500。
225.此时,有关所述激光雷达装置3000的各构成要素,可以适用上述内容,因此省略重复的叙述。
226.参见图9,从所述激光雷达装置3000的上面看,所述扫描部3200可以是圆盘形状。
227.并且,从所述激光雷达装置3000的上面来看,所述激光输出部3100和所述检测部3300可以配置成包含在所述扫描部3200的区域。
228.并且,从所述激光雷达装置3000的上面来看,所述激光输出部3100可配置成比所述检测部3300更接近所述固定镜部3500。
229.并且,从所述激光雷达装置3000的上面看,所述固定镜部3500可以比所述扫描部3200位于后方。
230.并且,从所述激光雷达装置3000的上面看,所述固定镜部3500可以配置成具有厚度。这可表示所述固定镜部3400配置成相对于所述旋转电机3320的旋转轴具有一定角度,但不限于此。
231.并且,从所述激光雷达装置3000的上面来看,所述角度测量部3400可以配置成与所述固定镜部3500至少一部分重叠。
232.图10和图11是一个实施例的激光雷达装置的侧面图。
233.参见图10和图11,一个实施例的激光雷达装置3000可以包括激光输出部3100、扫描部320 0、检测部3300、角度测量部3400、固定镜部3500。
234.此时,有关所述激光雷达装置3000的各构成要素,可以适用上述内容,因此省略重复的叙述。
235.参见图10,所述扫描部3200可以具有第一位置。此时,所述第一位置可以表示所述扫描部3200旋转动作过程中一个时间点的所述扫描部3200的位置,参见图11,所述扫描部3200可以具有第二位置。此时,所述第二位置可以表示所述扫描部3200旋转动作的过程中一个时间点的所述扫描部3200的位置,所述第二位置可表示从所述位置旋转180度的位置,但不限于此。
236.参见图10,所述扫描部3200在所述第一位置时,从所述激光输出部3100到所述反
射面321 0的上下方向的最短距离可比从所述检测部3300到所述反射面3210的上下方向最短距离短。
237.并且,从所述激光雷达装置3000的一个侧面来看,所述扫描部3200在所述第一位置时,从所述激光输出部3100输出的激光在所述反射面3210的上部区域反射而可以向前方进行照射,从前方通过所述反射面3210获得的激光在所述反射面3210的下部区域反射,可被所述检测部3300获得。
238.并且,参见图11,所述扫描部3200在所述第二位置时,从所述激光输出部3100到所述反射面3210的上下方向的最短距离可比从所述检测部3300到所述反射面3210的上下方向的最短距离长。
239.并且,从所述激光雷达装置3000的一个侧面来看,所述扫描部3200在所述第二位置时,从所述激光输出部3100输出的激光在所述反射面3210的下部区域反射,可照射到所述固定镜部3500,从所述固定镜部3500反射被所述反射面3210获得的激光在所述反射面3210的上部区域反射,可被所述检测部3300获得。
240.并且,从所述激光雷达装置3000的一个侧面来看,所述激光输出部3100配置在包括在所述扫描部3200的旋转电机3221的旋转轴的一方,所述检测部3300可配置在包括在所述扫描部3 200的所述旋转电机3221的旋转轴的另一侧。
241.并且,从所述激光雷达装置3000的一个侧面来看,所述固定镜部3500可配置成比所述检测部3300更接近所述激光输出部3100。
242.并且,从所述激光雷达装置3000的一个侧面来看,所述固定镜部3500可以比所述激光输出部3100和所述检测部3300配置在下部。
243.并且,从所述激光雷达装置3000的一个侧面来看,所述固定镜部3500可向上下方向位于对应于包括在所述扫描部3200的反射面3210的一部分的区域。这表示所述固定镜部3500的上下方向位置值与所述反射面3210的上下方向位置值至少部分重叠,但不限于此。
244.并且,从所述激光雷达装置3000的一个侧面来看,所述扫描部3200中包括的所述反射面3 210被配置成相对于所述旋转电机3221的旋转轴以第一预设角度配置,所述固定镜部3500可配置成相对于所述旋转电机3221的旋转轴具有第二预设角度。
245.此时,所述第一预设角度和所述第二预设角度可不同。
246.并且,此时,所述第二预设角度可小于所述第一预设角度。
247.并且,从所述激光雷达装置3000的一个侧面来看,所述角度测量部3400可以配置在所述固定镜部3500下部。
248.并且,从所述激光雷达装置3000的一个侧面来看,所述角度测量部3400可向上下方向配置在包括在所述扫描部3200的反射面3210的一部分对应的位置。这表示所述角度测量部3400 的上下方向位置值与所述反射面3210的上下方向位置值至少部分不重叠,但不限于此。
249.图12和图13是一个实施例的激光雷达装置的正面图。
250.参见图12和图13,一个实施例的激光雷达装置3000可以包括激光输出部3100、扫描部320 0、检测部3300、角度测量部3400、固定镜部3500。
251.此时,有关所述激光雷达装置3000的各构成要素,可以适用上述内容,因此省略重复的叙述。
252.参见图12,所述扫描部3200可具有第一位置。此时,所述第一位置可以表示所述扫描部3 200的旋转动作中一个时间点的所述扫描部3200的位置,参见图13,所述扫描部3200可以有第二位置。此时,所述第二位置可以表示所述扫描部3200的旋转动作中一个时间点的所述扫描部3200的位置,所述第二位置可以表示从所述第一位置旋转180度的位置,但不限于此。
253.参见图12,从所述激光雷达装置3000的正面看,所述扫描部3200在所述第一位置的情况下,所述扫描部3200中包括的反射面3210可看来是椭圆形。
254.并且,参见图13,从所述激光雷达装置3000的正面看,所述扫描部3200在所述第二位置的情况下,可能看不到包括在所述扫描部3200的反射面3210。
255.并且,从所述激光雷达装置3000的正面来看,所述激光输出部3100和所述检测部3300可配置成至少部分重叠。
256.并且,从所述激光雷达装置3000的正面来看,所述激光输出部3100和所述检测部3300可以配置成包括包括在所述扫描部3200的旋转电机3220的旋转轴3221。
257.图14和图15是一个实施例的激光雷达装置的背面图。
258.参见图14和图15,一个实施例的激光雷达装置3000可以包括激光输出部3100、扫描部320 0、检测部3300、角度测量部3400、固定镜部3500。
259.此时,有关所述激光雷达装置3000的各构成要素,可以适用上述内容,因此省略重复的叙述。
260.参见图14,所述扫描部3200可具有第一位置。此时,所述第一位置可以表示所述扫描部3 200的旋转动作中一个时间点的所述扫描部3200的位置,参见图15,所述扫描部3200可具有第二位置。此时,所述第二位置可以表示所述扫描部3200的旋转动作中一个时间点的所述扫描部3200的位置,所述第二位置可以表示从所述第一位置旋转180度后的动作,但不限于此。
261.参见图14,从所述激光雷达装置3000的背面看,所述扫描部3200在所述第一位置时,可能看不见包括在所述扫描部3200的反射面3210。
262.并且,参见所述图15,从所述激光雷达装置3000的背面看,所述扫描部3200是所述第二位置的情况下,包括在所述扫描部3200的所述反射面3210可看起来是椭圆形。
263.并且,从所述激光雷达装置3000的背面来看,所述激光输出部3100、所述检测部3300、所述角度测量部3400、所述固定镜部3500可配置成包括包括在所述扫描部3200的旋转电机322 0的旋转轴3221。
264.并且,从所述激光雷达装置3000的背面来看,所述固定镜部3500可以比所述激光输出部3 100和所述检测部3300配置在下部。
265.并且,从所述激光雷达装置3000的背面来看,所述固定镜部3500可以位于对应包括在所述扫描部3200的反射面3210的一部分的区域。这表示所述固定镜部3500的上下方向位置值与所述反射面3210的上下方向位置值至少有一部分重叠,但不限于此。
266.并且,从所述激光雷达装置3000的背面来看,所述固定镜部3500可以配置成对应包括在所述扫描部3200的反射面3210的下部区域。
267.并且,从所述激光雷达装置3000的背面来看,所述角度测量部3400可以配置在所述固定镜部3500下部。
268.并且,从所述激光雷达装置3000的背面来看,所述角度测量部3400可以配置成不对应包括在所述扫描部3200的所述反射面3210。
269.图16是一个实施例的激光雷达装置的立体图。
270.参见图16,一个实施例的激光雷达装置3000可包括激光输出部3100、扫描部3200、检测部3300、角度测量部3400、固定镜部3500和壳体3600。
271.此时,所述激光输出部3100、所述扫描部3200、所述检测部3300、所述角度测量部3400 及所述固定镜部3500可适用上述内容,因此省略重复的叙述。
272.参见图16,所述激光输出部3100、所述扫描部3200、所述检测部3300、所述角度测量部3 400及所述固定镜部3500可包括在所述壳体内。
273.并且,所述壳体3600还包括外壳3610和窗口3620。
274.并且,所述壳体3600的内部可被所述外壳3610和所述窗口3620密封。
275.此时,所述外壳3610可以针对外部环境保护包括在所述壳体内的所述激光雷达装置3000 的构成要素。
276.并且,所述外壳3610可被光学屏蔽,以防止外部光对包括在所述壳体内的所述激光雷达装置3000的构成要素的干扰。
277.并且,所述窗口3620可以针对外部环境保护包括在所述壳体内的所述激光雷达装置3000 的构成要素。
278.并且,所述窗口3620用于从所述激光输出部3100输出的激光向外部照射,为了使得被对象体反射的激光能够被所述检测部3300获得,可以具有光学窗口。例如,所述窗口3620使从所述激光输出部3100输出并被所述扫描部3200反射的激光透过,能够使从对象体反射的激光透过以使得被所述对象体反射的激光被所述扫描部3200反射而能够被所述检测部3300获得。
279.并且,所述窗口3620可以配置成构成所述壳体3600的部分区域。
280.图17是一个实施例的激光雷达装置的侧面图。
281.参见图17,一个实施例的激光雷达装置3000可以包括激光输出部3100、扫描部3200、检
282.测部3300、角度测量部3400、固定镜部3500和壳体3600。
283.在此,有关所述激光雷达装置3000的各构成要素,可以适用上述内容,因此省略重复的叙述。
284.参见图17,从所述激光雷达装置3000的一个侧面来看,所述壳体3600中包括的窗口3620 可位于所述壳体3600的一个区域。
285.并且,从所述激光雷达装置3000的一个侧面来看,包括在所述壳体3600的所述窗口3620 可配置成与所述扫描部3200中包括的反射面3210的至少一部分重叠。这表示从所述激光雷达装置3000的一个侧面来看,通过所述窗口3620,所述反射面3210至少一部分可光学可视,光学可视可表示利用能够获得至少一个波长带域的光的传感器进行观测,但不限于此,还可以包括位于物理上重叠的区域的概念。
286.并且,从所述激光雷达装置3000的一个侧面来看,包括在所述壳体4600中的所述窗口362 0可以配置成不与所述激光输出部3100重叠。从所述激光雷达装置3000的一个侧面来看,可以表示通过所述窗口3620无法光学可视所述激光输出部3100,无法光学可视表
示无法利用能够获得至少一个波长带域的光的传感器进行观测,但不限于此,可以包括位于物理上不重叠的区域的概念。
287.并且,从所述激光雷达装置3000的一个侧面来看,包括在所述壳体3600中的所述窗口362 0可以配置成不与所述检测部3300重叠。
288.并且,从所述激光雷达装置3000的一个侧面来看,包括在所述壳体3600中的所述窗口362 0可以配置成不与所述扫描部3200中的旋转电机3220重叠。
289.并且,从所述激光雷达装置3000的一个侧面来看,包括在所述壳体3600中的所述窗口362 0可以配置成不与所述角度测量部3400重叠。
290.并且,从所述激光雷达装置3000的一个侧面来看,包括在所述壳体3600中的所述窗口362 0可以配置成不与所述固定镜部3500重叠。
291.图18是一个实施的例子,激光雷达装置的正面图。
292.参见图18,一个实施例的激光雷达装置3000可包括激光输出部3100、扫描部3200、检测部3300、角度测量部3400、固定镜部3500和壳体3600。
293.此时,有关所述激光雷达装置3000的各构成要素,可以适用上述内容,因此省略重复的叙述。
294.参见图18,从所述激光雷达装置3000的正面看,所述壳体3600中包括的窗口3620可位于所述壳体3600的一个区域。
295.并且,从所述激光雷达装置3000的正面看,包括在所述壳体3600中的所述窗口3620可配置成与所述扫描部3200中包括的反射面3210的至少一部分重叠。这表示从所述激光雷达装置3 000的正面看,通过所述窗口3620光学可视所述反射面3210的至少一部分,光学可视表示利用能够获得至少一个波长带域的光的传感器进行观测,但不限于此,还可以包括位于物理上重叠的区域的概念。
296.例如,在图18中,所述反射面3210的上部区域和中央区域可以与所述窗口3620重叠,但不限于此。
297.并且,从所述激光雷达装置3000的正面看,所述壳体3600中包括的所述窗口3620区域的宽度可比所述扫描部3200中包括的反射面3210的宽度宽。
298.并且,从所述激光雷达装置3000的正面看,包括在所述壳体3600中的所述窗口3620可配置成不与所述扫描部3200中包括的反射面3210的至少一部分重叠。这可表示从所述激光雷达装置3000的正面看,通过所述窗口3620无法光学可视所述反射面3210至少有一部分。例如,在图18中,所述反射面3210的下部区域可不与所述窗口3620重叠。
299.并且,从所述激光雷达装置3000的正面看,包括在所述壳体4600中的所述窗口3620可以配置成不与所述激光输出部3100重叠。这可表示从所述激光雷达装置3000的一个侧面来看,通过所述窗口3620,无法光学可视所述激光输出部3100,无法光学可视表示无法利用能够获得至少一个波长带域的光的传感器进行观测,但不限于此,可以包括位于物理上不重叠的区域的概念。
300.并且,从所述激光雷达装置3000的正面看,包括在所述壳体3600中的所述窗口3620可以配置成不与所述检测部3300重叠。
301.并且,从所述激光雷达装置3000的正面看,包括在所述壳体3600的所述窗口3620可以配置成不与所述扫描部3200中包括的旋转电机3220重叠。
302.并且,从所述激光雷达装置3000的正面来看,所述壳体3600中包括的所述窗口3620可配置成不与所述角度测量部3400重叠。
303.并且,从所述激光雷达装置3000的正面来看,所述壳体3600中包括的所述窗口3620可配置成不与所述固定镜部3500重叠。
304.图19是一个实施例的激光雷达装置的平面图。
305.参见图19,一个实施例的激光雷达装置3000可包括激光输出部3100、扫描部3200、检测部3300、角度测量部3400、固定镜部3500和窗口3620。
306.此时,有关所述激光雷达装置3000的各构成要素,可以适用上述内容,因此省略重复的叙述。
307.参见图19,从所述激光雷达装置3000的上面看,所述窗口3620可具有第一窗口端部3621 和第二窗口端部3622。
308.并且,从所述激光雷达装置3000的上面看,所述窗口3620可从所述第一窗口端部3621延伸形成到所述第二窗口端部3622。
309.并且,从所述激光雷达装置3000的上面看,所述窗口3620可以从所述第一窗口端部3621 延伸形成到所述第二窗口端部3622。
310.并且,从所述激光雷达装置3000的上面看,所述固定镜部3500可以具有第一镜端部3501 和第二镜端部3502。
311.并且,从所述激光雷达装置3000的上面来看,所述固定镜部3500可以从所述第一镜端部3 501延伸形成到所述第二镜端部3502。
312.并且,从所述激光雷达装置3000的上面看,所述固定镜部3500可形成为从所述第一镜端部3501延伸形成到所述第二镜端部3502的四角形形状。
313.并且,从所述激光雷达装置3000的上面看,从所述扫描部3200中包括的反射面3210的中心到连接所述第一窗口端部3621的第一假想线和从所述反射面3210的中心连接所述第二窗口端部3622的第二假想线可以具有第一角度a1。
314.并且,从所述激光雷达装置3000的上面看,从所述反射面3210的中心到连接所述第一镜端部3501的第三假想线和所述从反射面3210的中心连接所述第二镜3502的第四假想线可以有第二角度a2。
315.在此,所述第一角度a1和所述第二角度a2可不同。
316.并且,所述第一角度a1可比所述第二角度a2大。
317.并且,所述第一角度a1可以是180度以上。
318.并且,所述第二角度a2可以是20度以下。
319.并且,从所述激光雷达装置3000的上面看,由所述第一虚拟线、所述第二虚拟线和所述窗口3620围成的区域即第一区域可与所述检测部3300至少部分重叠。
320.这可表示从所述激光雷达装置3000的上面看,所述检测部3300与所述第一区域至少部分重叠。
321.并且,从所述激光雷达装置3000的上面来看,所述第三虚拟线、所述第四虚拟线和所述固定镜部3500所围成的区域即第二区域与所述激光输出部3100至少部分重叠。
322.这可表示从所述激光雷达装置3000的上面看,所述激光输出部3100与所述第二区域至少有一部分重叠。
323.并且,从所述激光雷达装置3000的上面看,所述第一区域的宽度可大于所述第二区域的宽度。
324.并且,从所述激光雷达装置3000的上面看,所述反射面3210可与所述第一区域和所述第二区域至少有一部分重叠。
325.在此,从所述激光雷达装置3000的上面看,与所述反射面3210的所述第一区域重叠的部分宽度可大于与所述反射面3210的所述第二区域重叠的部分的宽度。
326.并且,从所述激光雷达装置3000的上面看,所述第一区域和所述第二区域可不重叠。
327.并且,从所述激光雷达装置3000的上面看,所述窗口3620可配置成不与所述第二区域重叠。
328.并且,从所述激光雷达装置3000的上面看,所述固定镜部3500可以配置成不与所述第一区域重叠。
329.图20和图21是一个实施例的激光雷达装置的侧面图。
330.参见图20和图21,一个实施例的激光雷达装置3000可以包括激光输出部3100、扫描部320 0、检测部3300、角度测量部3400、固定镜部3500和壳体3600。
331.此时,有关所述激光雷达装置3000的各构成要素,可以适用上述内容,因此省略重复的叙述。
332.参见图20,所述扫描部3200可以具有第一位置。此时,所述第一位置可以表示所述扫描部3200的旋转动作中的一个时间点的所述扫描部3200的位置,参见图21,所述扫描部3200可以有第二位置。此时,所述第二位置可以表示所述扫描部3200的旋转动作中一个时间点的所述扫描部的位置,所述第二位置可以表示从所述位置旋转180度的位置,但不限于此。
333.参见图20,从所述激光雷达装置3000的一个侧面来看,所述扫描部3200是所述第一位置的情况下,从所述激光输出部3100输出的激光在所述反射面3210反射,包括在所述壳体3600 的窗口3620的第一部分3621可位于所述反射面3210反射的激光的路径上。
334.并且,参见图21,从所述激光雷达装置3000的一个侧面来看,所述扫描部3200在所述第二位置时,从所述激光输出部3100输出的激光在所述反射面3210反射,所述固定镜部3500可位于在所述反射面3210反射的激光的路径上。
335.此时,从所述激光雷达装置3000的一个侧面来看,所述窗口3620的所述第一部分3621和所述固定镜部3500的上下方向位置可不同。
336.例如,所述窗口3620的所述第一部分3621的上下方向位置对应所述反射面3210的上部部分,所述固定镜部3500的上下方向位置可对应所述反射面3210的下部区域,但不限于此。
337.并且,从所述激光雷达装置3000的一个侧面来看,所述反射面3210被配置成对于包括在所述扫描部3200的旋转电机3220的旋转轴3221具有第一预设角度,所述固定镜部3500可配置成相对于所述旋转轴3221具有第二预设角度,所述窗口3620可相对于所述旋转轴3221配置成具有第三预设角度。
338.此时,所述第一至第三预设角度可不同。
339.并且,所述第一预设角度大于所述第二预设角度,所述第二预设角度可大于所述
第三预设角度。
340.实施例的方法可以以能够通过多种计算机设备执行的程序指令形式存储在计算机可读介质中。所述计算机可读介质可包括程序指令、数据文件、数据结构或其组合。存储在所述存储介质中的程序指令可以是实施例而专门设计和构建的,但也可以是计算机软件技术人员公知使用的。计算机可读存储介质例如可以是硬盘、软盘及磁盘等磁介质(magnetic media)、c d-rom、dvd等光存储介质(optical media)、软光盘(floptical disk)等磁-光介质(magnet o-optical media)及rom、ram、闪存盘等为了存储和执行程序命令而专门制成的硬件装置。并且,程序指令不仅包括通过编译器得到的机器代码,还包括能够通过计算机执行的高级语言代码。可以将上述硬件装置构建成用于执行实施例的动作的一个以上软件模块,反之相同。
341.以上通过限定的实施例及附图说明了实施例,但本领域普通技术人员可以在所述记载的基础上进行多种修改及变形。例如,说明的技术按照不同于说明方法的其他顺序执行,及/或说明的系统、结构、装置、电路等构成要素按不同于说明方法的方式结合或组合,或者由其他构成要素或等同物替换或置换也能够得到适当结果。
342.因此,其他实现方式、其他实施例及与技术方案等同的技术方案均属于本实用新型技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1