一种激光测距仪的制作方法
1.本实用新型属于激光技术领域,具体涉及一种激光测距仪。
背景技术:
2.激光测距仪作用距离远、测距精度高、抗干扰能力强,在各种光电系统中得到了广泛的应用。为保证作用距离远,激光器的发射功率一般为mw量级,如此高的发射功率在近距离测距时,很容易造成近距离测距精度差,探测器饱和甚至损坏。采用自动增益控制的办法,可以降低近距离目标的回波强度,但当目标反射率高时,回波幅值仍然很强,影响测距精度。
3.随着紧凑型光电装备的发展,激光测距仪集成于紧凑型光电装备中,这对体积、重量、功耗要求苛刻,安装空间十分紧张,激光测距仪与电视、红外等瞄准传感器之间的光轴校准通常采用修磨凸台的方式实现,这种方式校准效率低、校准工作量大。
4.因此,我们迫切需要一种新的激光测距仪。
技术实现要素:
5.本实用新型的目的在于提供一种激光测距仪,以方便的控制小目标测距条件下近距离回波强度、校准激光测距仪光轴与瞄准光轴的平行性,在操作空间有限的紧凑型光电装备中,实用性强、装调效率高。
6.本实用新型所采用的技术方案是:
7.一种激光测距仪,其包括激光器、发射光学系统、接收光学系统、楔形镜组件、探测接收电路及信号处理电路;
8.所述发射光学系统与接收光学系统平行设置,且发射光学系统置于激光器与楔形镜组件之间,接收光学系统置于楔形镜组件与探测接收电路之间;所述探测接收电路将接收到的数据传递给信号处理电路,信号处理电路将处理的结果传给激光器进行显示;
9.所述楔形镜组件覆盖了发射光学系统的发射口径和接收光学系统的接收口径,其包括第一楔形镜、第二楔形镜和旋转机构;所述第二楔形镜置于第一楔形镜后;所述旋转机构与第一楔形镜连接,旋转机构带动第一楔形镜沿光轴方向旋转。
10.按上述方案,所述旋转机构包括电机和齿轮,电机带动齿轮转动,进而带动第一楔形镜沿光轴方向旋转。在小目标测距条件下,激光发射、接收视场将偏离目标,当第一楔形镜沿光轴方向旋转时,可控制激光回波强度,从而提高测距精度。
11.按上述方案,所述楔形镜组件还包括楔镜座、楔镜筒、限位挡板、楔镜压圈;所述楔镜筒有两个,且置于楔镜座内;所述第一楔形镜、第二楔形镜分别置于楔镜筒内,通过限位挡板、楔镜压圈固定在楔镜座内。
12.按上述方案,所述第一楔形镜、第二楔形镜上镀制有激光发射波段增透膜,以提高测距精度。
13.按上述方案,所述第一楔形镜、第二楔形镜通过硅胶与楔镜筒连接。
14.按上述方案,所述激光器由驱动电路、谐振腔组成。
15.按上述方案,所述激光器为铒玻璃激光器、光纤激光器或半导体激光器,以确保测距精度。
16.按上述方案,所述发射光学系统由发射目镜、发射物镜组成;所述接收光学系统由第一接收物镜、第二接收物镜组成;结构简单,方便安设,也利于集成化。
17.按上述方案,所述探测接收电路由探测器、放大电路组成;所述信号处理电路由采样单元、计数单元、接口单元组成;以确保测距精度。
18.按上述方案,所述探测器为si雪崩管或ingaas雪崩管。
19.本实用新型的有益效果在于:
20.楔形镜组件覆盖了发射口径和接收口径,可用于激光回波强度控制;楔形镜旋转时,发射光轴与接收光轴同时偏转相同的角度,对激光测距仪发射光轴与接收光轴之间的平行性没有影响;
21.楔形镜组件还能用于激光测距仪光轴与瞄准光轴校准,使激光测距仪光轴与安装基面校准,从而提高测距精度;
22.通过设置第一楔形镜、第二楔形镜和旋转机构(电机、齿轮),可以方便的控制小目标测距条件下近距离回波强度,防止近距离回波信号饱和、防止探测器损坏,提高测距精度;
23.楔形镜组件用于激光测距光轴与瞄准光轴校准,调试方便,装调效率高;
24.结构简单,方便集成。
附图说明
25.下面将结合附图及实施例对本实用新型作进一步说明,附图中:
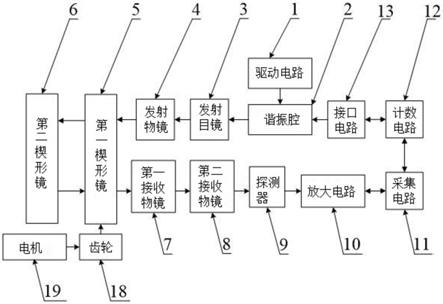
26.图1是激光测距仪的结构示意图;
27.图2是楔形镜组件的结构示意图;
28.图中:1、驱动电路,2、谐振腔,3、发射目镜,4、发射物镜,5、第一楔形镜,6、第二楔形镜,7、第一接收物镜,8、第二接收物镜,9、探测器,10、放大电路,11、采样单元,12、计数单元,13、接口单元,14、楔镜座,15、楔镜筒,16、限位挡板,17、楔镜压圈,18、齿轮,19、电机。
具体实施方式
29.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
30.参见图1、图2,一种激光测距仪,其包括激光器、发射光学系统、接收光学系统、楔形镜组件、探测接收电路及信号处理电路。发射光学系统与接收光学系统平行设置,且发射光学系统置于激光器与楔形镜组件之间,接收光学系统置于楔形镜组件与探测接收电路之间。探测接收电路将接收到的数据传递给信号处理电路,信号处理电路将处理的结果传给激光器进行显示。
31.激光器由驱动电路1、谐振腔2组成;可为铒玻璃激光器,其波长为1535nm
±
5nm;或光纤激光器,其波长为1550nm
±
20nm;或半导体激光器,其波长为1550nm
±
40nm或905
±
20nm。
32.发射光学系统由发射目镜3、发射物镜4组成;接收光学系统由第一接收物镜7、第二接收物镜8组成。
33.楔形镜组件覆盖了发射光学系统的发射口径和接收光学系统的接收口径,其包括第一楔形镜5、第二楔形镜6、旋转机构(齿轮18、电机19)、楔镜筒15、楔镜座14、限位挡板16、楔镜压圈1。第二楔形镜6置于第一楔形镜5后;旋转机构与第一楔形镜5连接,旋转机构带动第一楔形镜5沿光轴方向旋转。楔镜筒15有两个,且置于楔镜座14内。第一楔形镜5、第二楔形镜6分别置于楔镜筒15内,并通过限位挡板26、楔镜压圈17固定在楔镜座14内。在本实施例中,旋转机构包括电机19和齿轮18,当然也可采用其他旋转机构,只要能实现第一楔形镜5沿光轴方向旋转即可;电机19带动齿轮18转动,进而带动第一楔形镜5沿光轴方向旋转,从而实现激光回波强度的控制。
34.探测接收电路由探测器9、放大电路10组成;信号处理电路由采样单元11、计数单元12、接口单元13组成。在本实施例中,探测器9为si雪崩管或ingaas雪崩管。当探测器为si雪崩管时,其响应波段为400nm-1100nm;当探测器为ingaas雪崩管,其响应波段为900nm-1700nm。
35.装调方法包括以下步骤:
36.a、首先完成驱动电路1、谐振腔2、发射目镜3、发射物镜4、第一接收物镜7、第二接收物镜8、探测器9、放大电路10、采样单元11、计数单元12、接口单元13的装配;
37.b、完成激光测距仪发射光轴与接收光轴的平行性调试;
38.c、将第一楔形镜5、第二楔形镜6与楔镜筒15通过硅胶粘接;
39.d、将第一楔形镜5、第二楔形镜6、楔镜筒15与楔镜座14通过限位挡板16、楔镜压圈17进行固定;
40.e:将齿轮18、电机19固定;
41.f、将楔镜压圈17适当拧松,使第一楔形镜5、第二楔形镜6可顺畅旋转,完成激光测距光轴与安装基面的平行性调试,将楔镜压圈17适当拧紧;
42.f、激光测距仪集成于光电系统中后,激光测距光轴与瞄准光轴平行性调试时,将楔镜压圈17适当拧松,使第一楔形镜5可顺畅旋转,将激光测距光轴与瞄准的平行性完成调试,将楔镜压圈17适当拧紧。
43.在另一个实施例中,第一楔形镜5、第二楔形镜6上镀制有激光发射波段增透膜,其透过率不小于99%。第一楔形镜5、第二楔形镜6通过硅胶与楔镜筒15连接。
44.本实施例中,探测接收电路及信号处理电路均是常规电路,用于激光信号的处理,以最终得出被测物体的距离。
45.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1