一种基于深度学习的产品表面缺陷检测装置
1.本实用新型涉及产品检测技术领域,具体为一种基于深度学习的产品表面缺陷检测装置。
背景技术:
2.深度学习是学习样本数据的内在规律和表示层次,这些学习过程中获得的信息对诸如文字,图像和声音等数据的解释有很大的帮助,它的最终目标是让机器能够像人一样具有分析学习能力,能够识别文字、图像和声音等数据,例如,中国专利公开的一种基于深度学习的灯罩缺陷检测装置(cn214794510u),公开了深度学习系统,但是该专利不能对图像的检测角度进行调节,使得检测范围受限,且不能对待检测产品进行遮光处理,影响分析结果的准确性。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了一种基于深度学习的产品表面缺陷检测装置,解决了上述背景中的问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种基于深度学习的产品表面缺陷检测装置,包括检测装置主体和安装架板,所述检测装置主体的两侧面均安装有第一电机,所述安装架板的内侧位于与第一电机相对应处均安装有安装盘,且安装盘的一侧面下端固定有导向杆,所述安装架板的内侧位于安装盘的上方设置有安装杆,且安装杆的一端转动安装有摆动杆;
5.在所述安装架板的前表面和后表面上端均对称安装有第二安装板,两个所述第二安装板之间转动安装有转杆,且转杆的外表面中部设置有遮阳布,其中一个所述第二安装板的一侧面安装有第二电机。
6.作为本实用新型进一步的技术方案,所述摆动杆的一侧面位于与导向杆相对应处开设有导向滑槽,所述导向杆与导向滑槽相适配,所述导向杆与摆动杆为滑动连接。
7.作为本实用新型进一步的技术方案,两个所述摆动杆的一端共同固定有第一安装板,且第一安装板的下表面中部安装有ccd相机。
8.作为本实用新型进一步的技术方案,所述检测装置主体的内侧一端转动安装有主动滚轮,所述检测装置主体的内侧另一端转动安装有从动滚轮,所述检测装置主体的一侧面位于与主动滚轮相对应处安装有第三电机,所述主动滚轮的一端与第三电机的输出端为固定连接。
9.作为本实用新型进一步的技术方案,所述安装架板的一侧面位于第一电机的上方安装有主机,所述安装架板的内侧位于其中一个所述安装盘的下方安装有距离传感器。
10.作为本实用新型进一步的技术方案,所述遮阳布为黑色布料,所述转杆的一端与第二电机的输出端为固定连接。
11.有益效果
12.本实用新型提供了一种基于深度学习的产品表面缺陷检测装置。与现有技术相比具备以下有益效果:
13.1、一种基于深度学习的产品表面缺陷检测装置,在使用时,将待检测的产品放于输送带的外表面处,通过主机控制第三电机转动,带动主动滚轮转动,将产品进行输送,当产品输送至ccd相机下方,并由距离传感器检测后,反馈至主机处,由主机处理后,使得第三电机停止转动,并通过主机控制第二电机转动,带动转杆转动,将遮阳布放下,对ccd相机处形成遮光,并通过ccd相机对产品表面进行拍摄,使得检测拍摄效果更好。
14.2、一种基于深度学习的产品表面缺陷检测装置,同时,通过主机控制第一电机转动,带动安装盘转动,使得导向杆沿导向滑槽进行滑动,进而带动摆动杆沿安装杆进行摆动,以带动第一安装板和ccd相机沿弧形往复摆动,从而实现对ccd相机的拍摄角度进行调节,大大提高了检测范围。
附图说明
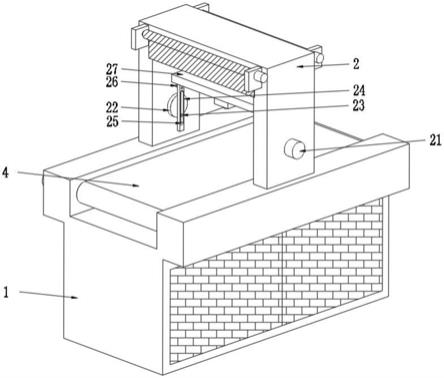
15.图1为一种基于深度学习的产品表面缺陷检测装置的第一视角结构示意图;
16.图2为一种基于深度学习的产品表面缺陷检测装置的第二视角结构示意图;
17.图3为一种基于深度学习的产品表面缺陷检测装置的截面结构示意图。
18.图中:1、检测装置主体;2、安装架板;21、第一电机;22、安装盘;23、导向杆;24、摆动杆;25、导向滑槽;26、安装杆;27、第一安装板;28、距离传感器;29、ccd相机;3、第二安装板;31、转杆;32、遮阳布;33、第二电机;4、输送带;41、第三电机;42、主动滚轮;43、从动滚轮;5、主机。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1-3,本实用新型提供一种基于深度学习的产品表面缺陷检测装置技术方案:一种基于深度学习的产品表面缺陷检测装置,包括检测装置主体1,检测装置主体1的两侧面均安装有第一电机21,安装架板2的内侧位于与第一电机21相对应处均安装有安装盘22,且安装盘22的一侧面下端固定有导向杆23,安装架板2的内侧位于安装盘22的上方设置有安装杆26,且安装杆26的一端转动安装有摆动杆24;
21.在安装架板2的前表面和后表面上端均对称安装有第二安装板3,两个第二安装板3之间转动安装有转杆31,且转杆31的外表面中部设置有遮阳布32,其中一个第二安装板3的一侧面安装有第二电机33。
22.摆动杆24的一侧面位于与导向杆23相对应处开设有导向滑槽25,导向杆23与导向滑槽25相适配,导向杆23与摆动杆24为滑动连接,两个摆动杆24的一端共同固定有第一安装板27,且第一安装板27的下表面中部安装有ccd相机29,在使用时,将待检测的产品放于输送带4的外表面处,通过主机5控制第三电机41转动,带动主动滚轮42转动,将产品进行输送,当产品输送至ccd相机29下方,并由距离传感器28检测后,反馈至主机5处,由主机5处理
后,使得第三电机41停止转动,并通过主机5控制第二电机33转动,带动转杆31转动,将遮阳布32放下,对ccd相机29处形成遮光,并通过ccd相机29对产品表面进行拍摄,使得检测拍摄效果更好,拍摄后的数据传送至主机5处,通过主机5内的深度学习体统进行对比检测。
23.检测装置主体1的内侧一端转动安装有主动滚轮42,检测装置主体1的内侧另一端转动安装有从动滚轮43,检测装置主体1的一侧面位于与主动滚轮42相对应处安装有第三电机41,主动滚轮42的一端与第三电机41的输出端为固定连接,安装架板2的一侧面位于第一电机21的上方安装有主机5,安装架板2的内侧位于其中一个安装盘22的下方安装有距离传感器28,遮阳布32为黑色布料,转杆31的一端与第二电机33的输出端为固定连接,同时,通过主机5控制第一电机21转动,带动安装盘22转动,使得导向杆23沿导向滑槽25进行滑动,进而带动摆动杆24沿安装杆26进行摆动,以带动第一安装板27和ccd相机29沿弧形往复摆动,从而实现对ccd相机29的拍摄角度进行调节,大大提高了检测范围。
24.本实用新型的工作原理:在使用时,将待检测的产品放于输送带4的外表面处,通过主机5控制第三电机41转动,带动主动滚轮42转动,将产品进行输送,当产品输送至ccd相机29下方,并由距离传感器28检测后,反馈至主机5处,由主机5处理后,使得第三电机41停止转动,并通过主机5控制第二电机33转动,带动转杆31转动,将遮阳布32放下,对ccd相机29处形成遮光,并通过ccd相机29对产品表面进行拍摄,使得检测拍摄效果更好,拍摄后的数据传送至主机5处,通过主机5内的深度学习体统进行对比检测;
25.同时,通过主机5控制第一电机21转动,带动安装盘22转动,使得导向杆23沿导向滑槽25进行滑动,进而带动摆动杆24沿安装杆26进行摆动,以带动第一安装板27和ccd相机29沿弧形往复摆动,从而实现对ccd相机29的拍摄角度进行调节,大大提高了检测范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1