一种SMT电路板双轨检测装置的制作方法
一种smt电路板双轨检测装置
技术领域
1.本技术涉及表面贴装质量检测的领域,尤其是涉及一种smt电路板双轨检测装置。
背景技术:
2.目前,smt贴片加工厂在电路板的锡膏印刷、元器件的贴装、回流焊完成后均需要进行进行质量检测,以便及时将不良品检出,以防流入市场;smt贴片加工厂常采用自动光学检测装置取代人工进行电路板的质量检测,检测效率和准确性均优于人工检测,近年来,为了进一步提高检测效率,市场上出现了双轨检测装置。
3.现有的电路板双轨检测装置常采用一个成像组件进行两条传送轨道上的电路板的光学检测,相对于传统的单轨检测装置,采用一个成像组件进行两条传送轨道上的电路板的光学检测会出现成像组件无法正对电路板进行光学检测的问题,进而导致检测精度较差的问题。
4.针对上述中的相关技术,发明人认为存在双轨光学检测成像精度较差的问题。
技术实现要素:
5.为了提高双轨光学检测的成像精度,本技术提供一种smt电路板双轨检测装置。
6.本技术提供的一种smt电路板双轨检测装置采用如下的技术方案:
7.一种smt电路板双轨检测装置,包括传送带、机架、滑轨、成像组件、驱动齿轮、电动机和电机输出轴,所述机架固定于地面,两条所述传送带穿设于所述机架,所述传送带用于传输电路板,所述滑轨水平并固定连接于所述机架,所述滑轨上开设有朝竖直方向贯通的滑槽,所述成像组件包括齿条、连接部、承载架和摄像头,所述连接部穿设并滑动连接于滑槽,所述连接部的两端分别连接于齿条和承载架,所述摄像头固定连接于所述承载架,所述电机输出轴沿传送带的方向设置,所述电机输出轴的一端连接于电动机,所述电机输出轴的另一端与所述驱动齿轮键连接,所述驱动齿轮与齿条啮合;所述电动机耦接有控制电路,所述控制电路包括:
8.第一距离检测比较模块,用于检测第一距离传感器检测到的距离值并输出第一距离检测信号,第一距离检测比较模块设置有第一距离基准信号verf1以在第一距离检测信号小于第一距离基准信号verf1时发出第一距离比较信号;
9.第一限位开关模块,耦接于第一距离检测比较模块,用于检测成像组件的位置,以在成像组件移动至第一极限位置时发出第一限位开关信号,控制电路断开;
10.第一开关模块,耦接于第一限位开关模块以在接收到第一距离比较信号时发出第一开关信号;
11.第一执行模块,耦接于第一开关模块且串联在电动机的供电回路中以在接收到第一开关信号时发出第一执行信号;
12.第三执行模块,耦接于第一执行模块并耦接于电动机的供电回路中,以在接收到第一执行信号时发出第三执行信号控制电动机正转;
13.第二距离检测比较模块,用于检测第二距离传感器检测到的距离值并输出第二距离检测信号,第二距离检测比较模块设置有第二距离基准信号verf2以在第二距离检测信号小于第二距离基准信号verf2时发出第二距离比较信号;
14.第二限位开关模块,耦接于第二距离检测比较模块,用于检测成像组件的位置,以在成像组件移动至第二极限位置时发出第二限位开关信号,控制电路断开;
15.第二开关模块,耦接于第二限位开关模块以在接收到第二距离比较信号时发出第二开关信号;
16.第二执行模块,耦接于第二开关模块且串联在电动机的供电回路中以在接收到第二开关信号时发出第二执行信号;
17.第四执行模块,耦接于第二执行模块并耦接于电动机的供电回路中,以在接收到第二执行信号时发出第四执行信号控制电动机反转。
18.通过采用上述技术方案,通过在smt电路板双轨检测装置的机架上固定连接滑轨,滑轨上开设有滑槽,使成像组件的连接部能够穿设并滑动连接于所述滑槽,而两条用于传输电路板的传送带均穿设于机架,因而成像组件能够沿滑槽移动至任一条传送带的正上方;成像组件包括齿条,电机输出轴沿传送带方向设置,电机输出轴的一端连接于电动机,且电机输出轴远离电动机的一端与驱动齿轮键连接,且电动机耦接有控制电路,因而成像组件能够在电动机和控制电路的控制下在两条传送带的正上方之间移动,解决了现有的双轨检测装置检测精度较差的问题,提高了双轨光学检测的成像精度;以第一距离传感器正下方的传送带检测到电路板为例,第一距离检测比较模块实时获取第一距离传感器检测到的距离值,若第一距离传感器下方传送带上的电路板移动至第一距离传感器下方时,第一距离检测比较模块获取到的距离值减小并发出第一距离比较信号,第一开关模块接收到第一距离比较信号并发出第一开关信号,第一执行模块接收到第一开关信号并发出第一执行信号,第三执行模块接收到第一执行信号并发出第三执行信号控制电动机正转,电动机正转带动成像组件向第一距离传感器对应的传送带移动,当成像组件向该传送带的位置移动到极限位置时,第一限位开关模块发出第一限位开关信号,控制第一限位开关模块所在的电路断开,使第一开关模块无法得到第一距离比较信号,因而电动机停止转动,成像组件位于该传送带的正上方并对该传送带上的电路板进行光学检测。
19.可选的,所述滑轨靠近电路板来料的一侧设置有两个用于检测电路板的距离传感器,两个所述距离传感器分别位于两条所述传送带的正上方,所述第一距离检测比较模块包括用于检测距离的第一距离传感器和第一比较器n1,所述第一比较器n1的第一信号输入端耦接于第一距离传感器,所述第一比较器n1的第二信号输入端耦接入第一距离基准信号verf1,所述第一比较器n1的信号输出端耦接于第一限位开关模块;所述第一距离传感器的一端耦接于电源电压vcc,另一端接地。
20.通过采用上述技术方案,滑轨靠近电路板来料的一侧设置有两个用于检测电路板的距离传感器,两个距离传感器分别位于两条传送带的正上方;当第一距离传感器下方未检测到电路板时,第一距离检测信号大于第一距离基准信号verf1,而当第一距离传感器下方检测到电路板时,第一距离检测信号小于第一距离基准信号verf1,第一比较器n1的信号输出端输出第一距离比较信号至第一开关模块,实现检测传送带上是否有电路板的功能。
21.可选的,所述机架内壁的两侧分别设置有第一行程开关s1和第二行程开关s2,所
述第一行程开关s1和第二行程开关s2均为常闭触点开关,当所述连接部在所述滑槽内滑动至滑槽的任一端时,所述齿条抵接于所述第一行程开关s1或者第二行程开关s2;所述第一限位开关模块包括第一行程开关s1,所述第一行程开关s1的一端耦接于第一比较器n1的信号输出端,另一端经第一电阻器r1后耦接于第一开关模块。
22.通过采用上述技术方案,机架内壁的两侧分别设置有第一行程开关s1和第二行程开关s2,当连接部在滑槽内滑动至滑槽的一端时,齿条抵接于第一行程开关s1或者第二行程开关s2,使第一行程开关s1或者第二行程开关s2被触动;当第一行程开关s1被触动时,第一距离检测比较模块与第一开关模块之间的电路被断开,使得第一距离比较信号无法发送至第一开关模块,从而达到使电动机将成像组件移动至电路板上方时自动停机的功能。
23.可选的,所述第一开关模块包括第一三极管q1,所述第一三极管q1的基极经第一电阻器r1后耦接于第一行程开关s1,所述第一三极管q1的集电极与第二电阻器r2串联后耦接于电源电压vcc,所述第一三极管q1的发射极与第一执行模块耦接后接地。
24.通过采用上述技术方案,当第一三极管q1的基极接收到第一比较器n1信号输出端输出的第一距离比较信号时,第一三极管q1由低电平转换成高电平并发出第一开关信号至第一继电器km1,使得第一继电器km1的常开触点开关km1-1闭合,当第一三极管q1未接收到第一距离比较信号时,维持低电平时,常开触点开关km1-1处于断开状态,第一三极管q1用于将检测来自距离检测比较模块的信号,根据接收到的不同信号控制第一执行模块的工作状态。
25.可选的,所述第一执行模块包括第一继电器km1,所述第一继电器km1的线圈一端串联于第一三极管q1的发射极,另一端接地,所述第一继电器km1包括第一常开触点开关km1-1,第一常开触点开关km1-1耦接于第三执行模块。
26.通过采用上述技术方案,当第一继电器km1接收到第一开关信号时,第一继电器km1发出第一执行信号使得第一常开触点开关km1-1闭合,进而接通电动机的供电回路,使第三执行模块发出第三执行信号;当第一继电器km1未接收到第一开关信号时,第一常开触点开关km1-1处于断开状态,第三执行模块未得电。
27.可选的,所述第三执行模块包括第三继电器km3,所述第三继电器km3的线圈一端与第一常开触点开关km1-1串联后耦接于直流电源的正极,另一端串联于直流电源的负极,所述第三继电器km3包括第三一常开触点开关km3-1和第三二常开触点开关km3-2,第三一常开触点开关km3-1的一端串联于直流电源的正极,另一端串联于电动机的正极,第三二常开触点开关km3-2的一端串联于电动机的负极,另一端串联于直流电源的负极。
28.通过采用上述技术方案,当第三继电器km3接收到第一执行信号时,第三继电器km3发出第三执行信号使得第三一常开触点开关km3-1和第三二常开触点开关km3-2闭合,进而接通使电动机正向转动的供电回路,使成像组件向第一距离传感器下方的传送带移动;当第三继电器km3未接收到第一执行信号时,第三一常开触点开关km3-1和第三二常开触点开关km3-2处于断开状态,电动机未得电。
29.可选的,所述第四执行模块包括第四继电器km4,所述第四继电器km4的线圈一端与第二常开触点开关km2-1串联后耦接于直流电源的正极,另一端串联于直流电源的负极,所述第四继电器km4包括第四一常开触点开关km4-1和第四二常开触点开关km4-2,第四一常开触点开关km4-1的一端串联于直流电源的负极,另一端串联于电动机的正极,第四二常
开触点开关km4-2的一端串联于电动机的负极,另一端串联于直流电源的正极。
30.通过采用上述技术方案,当第四继电器km4接收到第二执行信号时,第四继电器km4发出第四执行信号使得第四一常开触点开关km4-1和第四二常开触点开关km4-2闭合,进而接通使电动机反向转动的供电回路,使成像组件向第二距离传感器下方的传送带移动;当第四继电器km4未接收到第二执行信号时,第四一常开触点开关km4-1和第四二常开触点开关km4-2处于断开状态,电动机未得电。
31.可选的,所述连接部呈杆状,且所述连接部的数量为两个以上。
32.通过采用上述技术方案,所述连接部的数量为两个以上,有助于提高连接部在滑槽内滑动时的运动平稳性,使齿条和驱动齿轮之间的啮合更稳定,以提高驱动齿轮和齿条的使用寿命。
33.综上所述,本技术包括以下至少一种有益技术效果:
34.1.机架上固定连接滑轨,滑轨开设滑槽,使成像组件的连接部能够穿设并滑动连接于滑槽,而两条传送带均穿设于机架,因而成像组件能够沿滑槽移动至任一传送带的正上方;成像组件包括齿条,电机输出轴沿传送带方向设置,电机输出轴的一端连接于电动机,另一端与驱动齿轮键连接,电动机耦接有控制电路,因而成像组件能够在电动机和控制电路的控制下在两条传送带的正上方之间移动,提高了双轨光学检测的成像精度;
35.2.机架内壁的两侧分别设置有两个行程开关,当连接部在滑槽内滑动至滑槽任一端时,齿条抵接于其中一个行程开关,使行程开关被触动;当行程开关被触动时,对应的距离检测比较模块与开关模块之间的电路被断开,使得相应的距离比较信号无法发送至对应的开关模块,从而达到使电动机将成像组件移动至电路板上方时自动停机的功能;
36.3.电动机连接有正反转控制电路,且两条传送带的上方均设置有距离传感器,以便能够通过电动机控制成像组件移动至检测到电路板的传送带的正上方。
附图说明
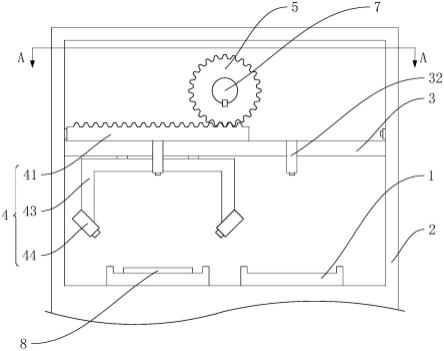
37.图1是本技术实施例的结构示意图。
38.图2是图1中a-a剖切线的剖视图。
39.图3是本技术滑轨和成像组件的装配图。
40.图4是本技术smt电路板双轨检测装置的俯视图。
41.图5是本技术实施例中控制电路的电路图。
42.图6是本技术实施例中电动机正反转电路的电路图。
43.附图标记说明:1、传送带;2、机架;3、滑轨;31、滑槽;32、距离传感器;4、成像组件;41、齿条;42、连接部;43、承载架;44、摄像头;5、驱动齿轮;6、电动机;7、电机输出轴;8、电路板;9、第一距离检测比较模块;10、第一限位开关模块;11、第一开关模块;12、第一执行模块;13、第三执行模块;14、第二距离检测比较模块;15、第二限位开关模块;16、第二开关模块;17、第二执行模块;18、第四执行模块。
具体实施方式
44.以下结合附图1-6对本技术作进一步详细说明。
45.本技术实施例公开一种smt电路板双轨检测装置。参照图1和图2,smt电路板双轨
检测装置包括传送带1、机架2、滑轨3、成像组件4、驱动齿轮5、电动机6(图中未示出)和电机输出轴7。
46.机架2固定于地面,机架2用于承载和安装smt电路板双轨检测装置的其他零部件,两条传送带1穿设于机架2,用于传输电路板8,优选的,传送带1上可以设置用于固定电路板8的结构。
47.滑轨3水平设置并固定连接于机架2,且滑轨3位于传送带1的上方,滑轨3上开设有竖直贯通于滑轨3的滑槽31,且滑槽31垂直于传送带1设置,滑轨3上还设置有两个距离传感器32,分别为第一距离传感器和第二距离传感器,距离传感器32设置于滑轨3位于传送带1来料方向的一侧,两个距离传感器32分别位于两条传送带1的正上方,且距离传感器32的检测方向竖直朝下,用于检测距离传感器32与下方传送带1之间的距离值,当检测传送带1将电路板8传输至距离传感器32下方时,距离传感器32检测到的距离值减小,以达到检测距离传感器32下方是否有电路板8的效果。
48.参照图2和图3,成像组件4包括齿条41、连接部42、承载架43和摄像头44,其中连接部42穿设并滑动连接于滑槽31,使成像组件4能够沿滑槽31方向在两条传送带1的正上方之间移动,且连接部42呈杆状,连接部42的数量为两个,便于提高连接部42在滑槽31内滑动的平稳性,齿条41位于滑轨3上方,机架2上设置有两个行程开关,分别为第一行程开关s1和第二行程开关s2,第一行程开关s1和第二行程开关s2均为常闭触点开关,且第一行程开关s1与第一距离传感器位于同侧,行程开关位于滑轨3两端的上方,当成像组件4移动至任一传送带1的正上方时,齿条41触动位于该传送带1一侧的行程开关,因而成像组件4的触动第一行程开关s1和第二行程开关s2时的所在位置分别为第一极限位置和第二极限位置;承载架43位于滑轨3下方,用于承载和固定摄像头44,承载架43不得对距离传感器32检测下方传送带1进行遮挡;成像组件4上的摄像头44的数量可以是一个,也可以是多个,优选的,一个或多个摄像头44均朝向且聚焦于光学检测时电路板8所在的位置,进一步地,摄像头44的朝向和焦距均可以进行调整。
49.参照图4,两条传送带1上的电路板8交错排列且两条传送带1同步运动,以便同一时间仅有一条传送带1上方的距离传感器32能够检测到电路板8;电路板8的光学检测所需时间小于电路板8的供料间隔时间,优选的,传送带1每次运动的距离为一条传送带1上的两块电路板8间隔距离的一半,传送带1每次运动后暂停运动一段时间,且传送单暂停运动的时间大于光学检测所需时间,以便传送带1每一次运动都能将一块电路板8传送至其中一个距离传感器32的下方以便进行光学检测。
50.参照图1和图2,电机输出轴7沿传送带1方向设置,电机输出轴7的一端连接于电动机6,电机输出轴7的另一端与驱动齿轮5键连接,驱动齿轮5与齿条41啮合,以便电动机6为驱动齿轮5提供动力,进而驱动成像组件4的移动,电动机6耦接有用于控制电动机6驱动成像组件4在两条传送带1上方之间移动的控制电路,控制电路包括第一距离检测比较模块9、第一限位开关模块10、第一开关模块11、第一执行模块12、第三执行模块13、第二距离检测比较模块14、第二限位开关模块15、第二开关模块16、第二执行模块17和第四执行模块18。
51.参照图5和图6,第一距离检测比较模块9用于检测第一距离传感器检测到的距离值并输出第一距离检测信号,第一距离检测比较模块9设置有第一距离基准信号verf1以在第一距离检测信号小于第一距离基准信号verf1时发出第一距离比较信号,第一距离检测
比较模块9包括用于检测距离的第一距离传感器和第一比较器n1,第一比较器n1的第一信号输入端耦接于第一距离传感器,第一比较器n1的第二信号输入端耦接入第一距离基准信号verf1,第一比较器n1的信号输出端耦接于第一限位开关模块10;第一距离传感器的一端耦接于电源电压vcc,另一端接地。
52.第一限位开关模块10耦接于第一距离检测比较模块9,用于检测成像组件4的位置,以在成像组件4移动至第一极限位置时发出第一限位开关信号,控制电路断开,第一限位开关模块10包括第一行程开关s1,第一行程开关s1的一端耦接于第一比较器n1的信号输出端,另一端经第一电阻器r1后耦接于第一开关模块11。
53.第一开关模块11,耦接于第一限位开关模块10以在接收到第一距离比较信号时发出第一开关信号,第一开关模块11包括第一三极管q1,第一三极管q1的基极经第一电阻器r1后耦接于第一行程开关s1,第一三极管q1的集电极与第二电阻器r2串联后耦接于电源电压vcc,第一三极管q1的发射极与第一执行模块12耦接后接地。
54.第一执行模块12,耦接于第一开关模块11且串联在电动机6的供电回路中以在接收到第一开关信号时发出第一执行信号,第一执行模块12包括第一继电器km1,第一继电器km1的线圈一端串联于第一三极管q1的发射极,另一端接地,第一继电器km1包括第一常开触点开关km1-1,第一常开触点开关km1-1耦接于第三执行模块13。
55.第三执行模块13,耦接于第一执行模块12并耦接于电动机6的供电回路中,以在接收到第一执行信号时发出第三执行信号控制电动机6正转,电动机6正转时,驱动成像组件4向第一距离传感器的方向移动,第三执行模块13包括第三继电器km3,第三继电器km3的线圈一端与第一常开触点开关km1-1串联后耦接于直流电源的正极,另一端串联于直流电源的负极,第三继电器km3包括第三一常开触点开关km3-1和第三二常开触点开关km3-2,第三一常开触点开关km3-1的一端串联于直流电源的正极,另一端串联于电动机6的正极,第三二常开触点开关km3-2的一端串联于电动机6的负极,另一端串联于直流电源的负极。
56.第二距离检测比较模块14,用于检测第二距离传感器检测到的距离值并输出第二距离检测信号,第二距离检测比较模块14设置有第二距离基准信号verf2以在第二距离检测信号小于第二距离基准信号verf2时发出第二距离比较信号,第二距离检测比较模块14包括用于检测距离的第二距离传感器和第二比较器n2,第二比较器n2的第一信号输入端耦接于第二距离传感器,第二比较器n2的第二信号输入端耦接入第二距离基准信号verf2,第二比较器n2的信号输出端耦接于第二限位开关模块15;第二距离传感器的一端耦接于电源电压vcc,另一端接地。
57.第二限位开关模块15,耦接于第二距离检测比较模块14,用于检测成像组件4的位置,以在成像组件4移动至第二极限位置时发出第二限位开关信号,控制电路断开,第二限位开关模块15包括第二行程开关s2,第二行程开关s2的一端耦接于第二比较器n2的信号输出端,另一端经第三电阻器r3后耦接于第二开关模块16。
58.第二开关模块16,耦接于第二限位开关模块15以在接收到第二距离比较信号时发出第二开关信号,第二开关模块16包括第二三极管q2,第二三极管q2的基极经第三电阻器r3后耦接于第二行程开关s2,第二三极管q2的集电极与第四电阻器r4串联后耦接于电源电压vcc,第二三极管q2的发射极与第二执行模块17耦接后接地。
59.第二执行模块17,耦接于第二开关模块16且串联在电动机6的供电回路中以在接
收到第二开关信号时发出第二执行信号,第二执行模块17包括第二继电器km2,第二继电器km2的线圈一端串联于第二三极管q2的发射极,另一端接地,第二继电器km2包括第二常开触点开关km2-1,第二常开触点开关km2-1耦接于第四执行模块18。
60.第四执行模块18,耦接于第二执行模块17并耦接于电动机6的供电回路中,以在接收到第二执行信号时发出第四执行信号控制电动机6反转,电动机6反转时,驱动成像组件4向第二距离传感器的方向移动,第四执行模块18包括第四继电器km4,第四继电器km4的线圈一端与第二常开触点开关km2-1串联后耦接于直流电源的正极,另一端串联于直流电源的负极,第四继电器km4包括第四一常开触点开关km4-1和第四二常开触点开关km4-2,第四一常开触点开关km4-1的一端串联于直流电源的负极,另一端串联于电动机6的正极,第四二常开触点开关km4-2的一端串联于电动机6的负极,另一端串联于直流电源的正极。
61.本技术实施例一种smt电路板双轨检测装置的实施原理为:使用一种smt电路板双轨检测装置进行双轨smt电路板光学检测时,两条传送带1传输电路板8轮流从两侧进入双轨smt电路板光学检测装置,若第一距离传感器检测到电路板8时,则第一距离传感器检测到的距离值减小,因而第一距离传感器输出的第一距离检测信号也减小,当第一距离检测信号小于第一距离基准信号verf1时,第一距离检测比较模块9发出第一距离比较信号经第一限位开关模块10后到达第一开关模块11,此时第一行程开关s1尚未被触动,因而第一限位开关模块10内的第一行程开关s1保持闭合状态,第一距离比较信号能够被第一开关模块11接收,第一开关模块11在接收到第一距离比较信号后发出第一开关信号第一三极管q1的基极接收到第一距离比较信号并转换为高电平,进而发出第一开关信号至第一继电器km1,第一继电器km1接收到第一开关信号并发出第一执行信号使得第一常开触点开关km1-1闭合,进而发出第一执行信号至第三继电器km3,第三继电器km3接收到第一执行信号并发出第三执行信号使得第三一常开触点开关km3-1和第三二常开触点开关km3-2闭合,进而连通电动机6正转的供电回路,使电动机6正转。
62.电动机6与驱动齿轮5同轴转动,驱动齿轮5驱动齿条41向第一距离传感器的方向移动,使成像组件4向第一距离传感器的方向移动,当成像组件4向第一距离传感器的方向移动至第一距离传感器正对的传送带1的正上方时,齿条41触动第一行程开关s1,第一行程开关s1处于断开状态,使第一限位开关模块10所在位置的电路断开,第一距离比较信号无法被第一开关模块11接收,电动机6停止正传,达到了当第一距离传感器检测到电路板8时,成像组件4能够自动移动至电路板8所在传送带1的正上方的效果,同时还达到了成像组件4移动到位后电动机6自动停止转动的效果。当第二距离传感器检测到电路板8时,电路的通断、信号的传递和设备的机械结构运动状态的变化与上述第一距离传感器检测到电路板8时类似,因此不再赘述。
63.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1