信息处理装置、信息处理方法和程序与流程
1.本公开涉及信息处理装置、信息处理方法和程序,并且更具体地,涉及可以利用简单操作适当地校准的信息处理装置、信息处理方法和程序。
背景技术:
2.存在使用设置有压力传感器的触屏笔在平板的显示单元上绘制图像的绘制技术,其中,触屏笔与平板等的显示表面接触来进行绘制。
3.在这种情况下,需要以预定间隔校准触屏笔的压力传感器。
4.因此,提出了一种用于通过如下配置校准压力传感器的技术,即,在将触屏笔直立放置在预定的笔筒上时,预定的力作用于笔的前端的压力传感器上(见专利文献1)。
5.引用列表
6.专利文献
7.专利文献1:日本专利申请公开号2016-157322
技术实现要素:
8.本发明要解决的问题
9.顺便提及,在上述绘图技术中,通过触屏笔与平板电脑接触来实现绘图,但是,例如,考虑设置陀螺仪传感器代替触屏笔中的压力传感器,使得可以在与平板电脑的非接触状态下根据笔尖部分的移动来执行绘图。
10.在这种情况下,可以设想当笔被直立放置在预定笔筒上时使用角速度执行校准,但是因为包括地球的自动旋转分量和偏差分量,所以仅利用在一种类型的静止姿态中获得的角速度不能适当地执行校准。
11.为了使用角速度实现校准,除非使用在至少两种不同类型的静止姿态中获得的角速度,否则不能适当地执行校准,并且用户需要放置笔以便采取至少两种类型的静止姿态。由此,与校准有关的操作变得麻烦。
12.鉴于这种情况做出本公开,并且特别地通过简单的操作实现适当的校准。
13.问题的解决方案
14.根据本公开的一方面的信息处理装置和程序是一种信息处理装置和程序,所述信息处理装置包括:控制单元,在一个静止姿态中,基于作为由惯性测量单元检测的测量值的静止姿态测量值以及与惯性测量单元的布置相关的信息来校准惯性测量单元。
15.根据本公开的一方面的信息处理方法是一种信息处理方法,包括:在一个静止姿态中,基于作为由惯性测量单元检测的测量值的静止姿态测量值以及与惯性测量单元的布置相关的信息来校准惯性测量单元。
16.在本公开的一个方面中,一个静止姿态中,基于作为由惯性测量单元检测的测量值的静止姿态测量值以及与惯性测量单元的布置相关的信息来校准惯性测量单元。
附图说明
17.图1是描述应用了本公开的技术的笔型绘图系统的配置实例的视图。
18.图2是描述笔和笔筒的详细外部配置实例的视图。
19.图3是描述笔的详细配置实例的视图。
20.图4是描述笔筒的详细配置实例的视图。
21.图5是描述笔筒的盖中的凹部的配置实例的视图。
22.图6是描述笔型绘图系统的操作的概要的视图。
23.图7是描述笔型绘图系统的操作的概要的视图。
24.图8是描述笔型绘图系统的操作的概要的视图。
25.图9是描述笔型绘图系统的整体处理的流程图。
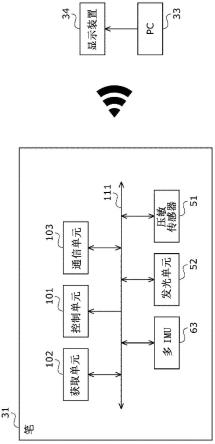
26.图10是描述构成笔型绘图系统的笔的硬件配置实例的示图。
27.图11是描述由笔的控制单元实现的功能的示图。
28.图12是描述通过图11中的惯性导航处理单元实现的功能的示图。
29.图13是描述全局坐标系与传感器坐标系之间的关系的示图。
30.图14是描述与笔型绘图系统的操作相关的状态转换的示图。
31.图15是描述通过图11中的笔的控制处理的流程图。
32.图16是描述图15中的状态转换处理的流程图。
33.图17是描述图15中的初始重力估计处理的流程图。
34.图18是描述图15中的偏差估计处理的流程图。
35.图19是描述在图15中示出的绘图处理的流程图。
36.图20是描述笔和笔筒的外部配置的修改例1的视图。
37.图21是描述笔和笔筒的外部配置的修改例2的视图。
38.图22是描述笔和笔筒的外部配置的修改例3的视图。
39.图23是描述笔型绘图系统的应用实例的视图。
40.图24是描述笔与笔筒之间的方位差的视图。
41.图25是描述在获得笔筒的绝对方位角之后更新绝对方位角的实例的示图。
42.图26是描述在笔型绘图系统的应用实例中的笔和笔筒的硬件配置实例的示图。
43.图27是描述由笔筒的控制单元实现的功能的示图。
44.图28是描述笔与笔筒之间的协作处理的流程图。
45.图29是描述笔与笔筒之间的协作处理的变形例的流程图。
46.图30是示出通用个人计算机的配置实例的示图。
具体实施方式
47.在下文中,将参考附图详细描述本公开的优选实施方式。注意,在描述和附图中,具有基本上相同的功能配置的部件由相同的附图标记表示,并且省略冗余的描述。
48.在下文中,将描述用于执行本技术的模式。将按照以下顺序进行描述。
49.1.优选实施方式
50.2.应用实例
51.3.由软件执行的实例
52.《《1.优选实施方式》》
53.《笔型绘图系统》
54.具体地,本公开通过简单的操作能够实现适当的校准。
55.图1是描述应用了本公开的技术的笔型绘图系统的外部配置的视图。
56.图1中的笔型绘图系统11包括笔31、笔筒32、个人计算机(pc)33以及显示装置34。
57.当用户21握住笔31并且用户21移动其笔尖以与期望绘制的形状相对应时,笔尖的轨迹的对应信息被检测并且通过诸如wi-fi的通信被发送到pc 33。
58.更具体地,笔31包括惯性测量单元(imu),该惯性测量单元包括加速度传感器和陀螺仪传感器,通过惯性导航获得由用户21移动时笔尖的位置的轨迹,并且将该轨迹传输至pc 33。
59.pc 33基于从笔31传输的笔31的笔尖的轨迹信息生成绘制与笔31的笔尖的移动对应的轨迹的绘制图像,并且使包括液晶显示器(lcd)、有机电致发光(el)等的显示装置34显示绘制的图像。
60.笔筒32由透明丙烯酸板等形成,设置有孔32a,孔32a具有与笔31的笔尖大致相同的形状,并且笔筒32被配置为使得笔31的笔尖插入到孔32a中以直立放置笔31。
61.此外,笔筒32和笔31被配置为使得相互的位置关系不改变,并且笔31被配置为使得当竖直放置在笔筒32上时地球上的绝对方位角变为恒定方位角。
62.利用这样的配置,笔31可以通过获取绝对方位角和纬度来获得自动旋转分量,使得可以通过基于以直立放置在笔筒32上的一种静止姿态检测的角速度指定偏差分量来实现校准。
63.因此,在图1的笔型绘图系统11中,用户21从笔筒32取出笔31并移动笔尖以绘制期望绘制的形状,使得显示装置34可将期望的形状显示为绘制的图像。
64.此时,笔31可以通过直立放置在笔筒32上的简单操作而采取一种静止姿态,并且可以适当地校准所结合的imu。
65.应注意,虽然图1描述了对应于笔31的绘制操作的绘制图像显示在显示装置34上的实例,但是可以使用任何其他配置,只要其能够执行显示,并且例如,可以使用头戴式显示器(hmd)等。
66.《笔和笔筒的外部配置实例》
67.图2示出了笔31和笔筒32的外部配置实例。
68.笔31包括压敏传感器51和发光单元52。
69.压敏传感器51是一种按钮,当用户试图通过操作按钮在显示装置34上绘图时用户按压该按钮,通过操作该按钮,使得笔尖的位置在保持状态下改变。
70.即,当压敏传感器51处于被按压状态时,通过惯性导航检测笔31的笔尖的轨迹的信息并且将该信息发送到pc 33。
71.此时,基于从笔31发送的轨迹的信息,pc 33使显示装置34随着笔31的笔尖的移动显示所绘制的图像。
72.当笔31直立放置在笔筒32上并且完成校准时,发光单元52发光;当从笔31从笔筒32中取出并且执行绘制操作时所经过的时间超过预定时间时关闭;并且当笔再次直立放置在笔筒32上并且完成校准时,发光单元52发光。
73.此后,由用户21从笔筒32取出笔31,按压压敏传感器51,并且笔31的笔尖移动以绘制期望由用户21绘制的形状的操作被称为绘制操作。
74.因此,当执行绘图操作时,笔31通过惯性导航检测笔尖的轨迹的信息并且将该信息传输至pc 33,并且pc 33基于所传输的轨迹信息,使显示装置34显示与随着笔31的笔尖的移动而绘制的轨迹相对应的绘制的图像。
75.此外,如图3所示,笔31包括:电路板61,构成包括压敏传感器51和发光单元52的各种控制单元;电池62,提供笔31的驱动电力;以及多imu 63,包括imu 63a至63d。
76.压敏传感器51、发光单元52和多imu 63设置在电路板61上,并且通过设置在电路板61上的控制单元101(图10)进一步控制其操作。
77.多imu 63包括多个imu 63a至63d,基于惯性导航由每个imu 63a至63d获得的角速度和加速度来检测位置信息,并且将位置信息输出至控制单元101。
78.注意,为了提高检测精度的目的,多imu 63包括四个imu 63a至63d,但是可以是任何数量,只要该数量是两个或更多个,并且如果允许检测精度降低,则可以由一个imu而不是多imu 63配置。
79.如图4所示,笔筒32由透明的丙烯酸树脂形成,并且包括形成孔32a的内径部86、外周部85和盖84,孔32a具有与笔31的顶端大致相同的形状。
80.如图4的中央部所示,外周部85通过将底部配合(fit)在内径部86的底部的台阶部上并且将上部经由o形环82和83与盖84配合而固定。
81.另外,在内径部86与外周部85之间形成有中空部,该中空部填充有具有透过光的透明性的着色液体81。
82.通过这样的配置,通过将笔31的笔尖插入到孔32a中,笔可被直立放置在笔筒32上。
83.此外,由于液体81处于被由透明丙烯酸树脂形成的内径部86、外周部85和盖84填充的状态,所以由笔31的笔尖处的发光单元52发射的光使得液体81发光,使得即使在笔31被直立放置在笔筒32上的状态下,用户也能够视觉识别发光单元52的发光状态。
84.此外,如图5所示,具有与具有凸出形状的压敏传感器51对应的形状的凹部84a形成在构成孔32a的外部形状的盖84中,并且在笔通过将笔尖插入孔32a中而竖直放置的情况下,除非具有凸出形状的压敏传感器51和凹部84a处于面向彼此配合的位置,否则笔31不能竖直放置。
85.通过这样的配置,笔31总是在保持特定位置关系的状态下相对于笔筒32直立放置。
86.注意,在以下的说明中,假设笔筒32一旦被直立就不再移动或旋转。由此,当笔31被直立放置在笔筒32上时,假设笔31总是被直立放置在相同的绝对方位角上。
87.《笔型绘图系统的操作概述》
88.接下来,将参考图6至图8描述图1的笔型绘图系统11的操作的概述。
89.首先,为了进行笔31的初始校准,将笔31的笔尖插入笔筒32的孔32a中并且如图6的左部和中央部所示直立放置。
90.注意,在下文中,除非另外指定,否则笔31被直立放置在笔筒32上的情况指的是在笔31的具有凸出形状的压敏传感器51和设置在盖84中的凹部84a如上所述彼此面对的状态
下,笔31的笔尖在配合状态(fitted state)下插入到笔筒32的孔32a中的状态。
91.这里,笔31通过获取地球上的位置信息(纬度)和绝对方位角的信息来计算包含在由多imu 63检测的角速度中的自动旋转分量,基于自动旋转分量获得偏差分量,并且执行校准。
92.当校准完成时,如在图6的右部中示出的,笔31控制笔尖处的发光单元52发光,以指示校准的完成。伴随于此,在笔筒32中,由于内径部86、外周部85和盖84由透明的丙烯酸树脂形成,在内径部86与外周部85之间的中空部填充有着色液体81,所以通过在笔31的笔尖处的发光部52发光,能够视觉辨认为笔筒32整体发光。
93.用户21通过视觉地识别在笔31的笔尖处的发光单元52正在通过笔筒32发射光来识别校准的完成。
94.接下来,如图7的左侧部分(与图6的右侧部分相同)所示,当通过笔31的笔尖的颜色变化经由笔筒32识别到校准的完成时,用户21在用户想要绘制的时刻从笔筒32中取出笔31,如图7的右侧部分所示。
95.如在图7的右部中示出的,用户21取出笔31,并且如在图8的左部中示出的,在按压设置在笔31的侧表面部上的压敏传感器51的同时移动笔尖以绘制期望形状的轨迹。
96.然后,当按下绘制按钮31a时,笔31识别用户21具有绘制的意图,通过惯性导航获得随着笔31的笔尖的移动的轨迹(位置信息的位移),并将该轨迹作为笔31的笔尖的轨迹信息发送到pc 33。
97.基于从笔31发送的指示笔31的笔尖的位置信息的位移的轨迹信息,例如,pc 33产生绘制图像,好像随着笔31的笔尖的移动利用笔绘制该绘制图像,并且使显示装置33显示绘制的图像,如图8的右侧部分所示。
98.要注意的是,随着笔31从笔筒32中取出时起经过的时间,在由imu获得的笔尖的位置信息中累积误差。因此,当从笔筒32取出之后的经过时间超过预定时间(10秒规律性),并且累积了大于预定误差的误差并且校准变得需要时,笔31关闭笔尖处的发光单元52。
99.当用户通过笔31的笔尖处的发光单元52以这种方式关闭识别到需要进行校准时,用户将笔31插入笔筒32的孔32a中以将笔31直立放置,如图6中所示。
100.通过重复这一系列操作,在校准笔31的imu的误差的同时,当校准完成时,用户21从笔筒32取出笔31,在按压压敏传感器51的同时移动笔尖以追踪期望的形状,并且因此能够具有在显示装置34上显示的用于绘制期望形状的绘制图像。
101.此外,在校准时,由于笔31可以通过获取其自身在地球上的位置信息(纬度)和直立放置在笔筒32上时的绝对姿态的信息来获得自动旋转分量,所以校准可以仅通过采用其中笔31直立放置在笔筒32上这样的一个静止姿态以便获得偏差分量来实现。
102.结果,当使用笔31时,用户仅通过执行将笔直立放置在笔筒32上的操作,可使得笔31采取校准所需的一种静止姿态,从而可实现容易且高精度的校准。
103.《整体处理》
104.接下来,将参考图9的流程图描述图1的笔型绘图系统11的整体操作。
105.在步骤s11中,笔31确定是否已经操作了开/关按钮(未示出)并且已经开启了电源。
106.在步骤s11中确定电源未接通的情况下,重复类似处理。
107.在假设步骤s11中电源被接通的情况下,处理进行至步骤s12。
108.在步骤s12中,笔31确定是否处于直立放置在笔筒32上的状态,即,是否基于其自身运动的存在或不存在来执行绘制。
109.在步骤s12中确定不存在笔31的移动并且笔31处于直立放置在笔筒32上的状态的情况下,处理进行至步骤s13。
110.在步骤s13中,笔31执行校准处理并且计算校正多imu 63所需的自动旋转分量和偏差分量。
111.在步骤s14中,笔31使发光单元52发光以指示校准已经完成。
112.在步骤s15中,基于笔31是否移动并且从笔筒32中取出,并且按压压敏传感器51,确定用户21是否指示绘制与笔31的笔尖的移动对应的轨迹。
113.在步骤s15中确定为没有指示描绘的情况下,重复同样的处理。
114.然后,在步骤s15中确定笔移动并且从笔筒32中取出并且按压压敏传感器51并且用户21已经指示绘制与笔31的笔尖的移动对应的轨迹的情况下,处理进行至步骤s16。
115.在步骤s16中,笔31基于自动旋转分量和偏差分量校正姿态旋转矩阵,基于校正的姿态旋转矩阵以时间序列将传感器坐标系中的加速度转换成全局坐标系中的加速度,并且依次将加速度相加,从而将作为惯性导航的笔31的轨迹的全局坐标系中的位置信息输出至pc33,并且使显示装置34根据位置变化绘制笔31的笔尖的轨迹。
116.在步骤s17中,笔31确定从笔筒32取出笔31的时刻起是否已经过去了预定时间(例如,大约10秒)并且已经给出用于绘制的指令,已经累积了由于惯性导航引起的误差,并且因此绘制位置的可靠性已经变得低于在预定状态下的可靠性。
117.在步骤s17中确定未经过预定时间并且绘图位置的可靠性不低于预定状态下的可靠性的情况下,即,在确定绘图中具有足够的可靠性的情况下,处理返回至步骤s15。即,直到预定时间过去为止,重复步骤s15至s17中的处理,并且只要笔31从笔筒32取出并且按压压敏传感器51的状态继续,与笔31的笔尖的移动对应的轨迹被连续地绘制在显示装置34上。
118.然后,在步骤s17中假设已经过去了预定时间并且绘制位置的可靠性已经变得低于预定状态的情况下,处理进行至步骤s18。
119.在步骤s18,笔31关闭发光单元52以表明需要校准。
120.在步骤s19中,笔31确定是否已经关闭电源并且已经指示结束,并且在尚未关闭电源并且没有指示结束的情况下,处理返回至步骤s12。
121.注意,在步骤s12中确定为笔31没有直立放置在笔筒32中的情况下,跳过步骤s13至s17中的处理,并且处理进入步骤s18。
122.即,通过步骤s18中的处理,表明通过关闭发光单元52进行校准是必要的,并且用户将笔31返回至笔筒32以直立站立,使得步骤s12至s19中的处理被重复。
123.然后,在步骤s19中,当假设电源断开并且给出结束指令时,处理结束。
124.通过上述处理,当笔31被直立放置在笔筒32上并被校准时,使发光单元52发光,以表明校准完成。然后,在完成校准并指示绘图之后的预定时间内,在通过按压压敏传感器51进行绘图操作的状态下,在显示装置34上绘制与笔31的笔尖的移动对应的轨迹。
125.当预定时间过去时,发光单元52被关闭以表明必须校准,并且伴随于此,笔31被直
立放置在笔筒32上以执行校准。然后,当校准完成时,发光单元52再次打开,并且重复类似的处理,使得对应于笔31的笔尖的移动的轨迹作为绘制的图像显示在显示装置34上。
126.由于具有凸出形状的压敏传感器51被直立放置在笔筒32的孔32a中以便配合到凹部84a中,所以笔31可以通过采用一种静止姿态的简单操作来实现适当的校准。
127.《笔型绘图系统的硬件配置实例》
128.接下来,参照图10,描述笔型绘图系统的硬件配置实例。
129.笔31包括控制单元101、获取单元102、通信单元103、多imu 63、发光单元52和压敏传感器51,并且通过包括例如串行总线等的总线111电连接以实现相互通信。
130.控制单元101包括处理器、存储器等,并且控制笔31的整个操作。
131.此外,通过执行预定应用程序,控制单元101基于由获取单元102预先获取的地球上的位置信息(纬度)和绝对方位角以及由多imu 63检测的加速度和角速度执行校准,实现稍后描述的惯性导航处理,并且计算笔31的笔尖的轨迹。
132.另外,控制单元101在校正结束时对发光部52进行控制,以发出表明校正结束的光,在从校正结束起经过了预定时间的情况下,将发光部52关闭,以表明需要校正。
133.此外,当按压压敏传感器51并且指示绘图操作时,控制单元101通过惯性导航处理获得指示笔31的笔尖的轨迹的位置信息,控制通信单元103将位置信息传输至pc 33,并且使显示装置34显示位置信息。
134.获取单元102接收并且获取用户使用键盘、操作按钮等(未示出)的操作输入或者从gnss等提供的地球上的绝对方位角和纬度的输入,并且将该输入提供至控制单元101。
135.注意,由获取单元102获取的地球上的绝对方位角和纬度在一旦获取后用作基本固定的值,因此由控制单元101存储和使用由获取单元102获取的绝对方位角和纬度的信息。
136.通信单元103由控制单元101控制,通过例如wi-fi等实现与pc 33的通信,并且发送和接收各种数据和程序。
137.《通过图10中的笔的控制单元实现的功能》
138.接下来,将参考图11描述由图10中的笔31的控制单元101实现的功能。
139.控制单元101包括惯性导航处理单元131、发光控制单元132、压敏传感器处理单元133以及外部接口(i/f)134。
140.另外,发光控制单元132由惯性导航处理单元131控制,在校准完成时,向控制发光部52的控制ic 141提供控制信号,使led 142发光,表明校准完成。
141.此外,当需要校准时,发光控制单元132提供控制信号,用于指示控制发光单元52的控制ic 141关断led 142,以表明需要校准。
142.压敏传感器处理单元133基于从压敏传感器51提供的压力值来确定其是否被按压以指示绘制操作,并且当压力值高于预定值时,经由外部i/f134将表示指示绘制操作的信号输出至惯性导航处理单元131。
143.当笔31直立放置在笔筒32上而处于静止姿态状态时,惯性导航处理单元131根据多imu 63检测到的加速度和角速度以及获取单元102获取的绝对方位角和纬度信息,获得初始重力方向、自动旋转分量和偏差分量,从而实现校准。
144.惯性导航处理单元131通过自动旋转分量和偏差分量校正多imu 63获取的角速度
以更新姿态旋转矩阵,从而实现校准,通过对多imu 63通过惯性导航获得的加速度进行积分,获得表示笔31的笔尖轨迹的时间序列位置信息。
145.惯性导航处理单元131经由外部i/f 134将作为指示笔31的笔尖的轨迹的时间序列位置信息的位置信息从通信单元103发送到pc 33,并且使显示装置34显示对应的绘制的图像。
146.《图11中实现惯性导航处理单元的功能》
147.接下来,将参考图12描述用于实现图11中的惯性导航处理单元131的功能的配置实例。
148.惯性导航处理单元131具有位置姿态处理单元151、初始姿态估计单元152、静止确定单元153。
149.静止确定单元153基于从多imu 63提供的加速度和角速度的信息确定笔31是否处于静止状态,即,笔31是否处于直立放置在笔筒32上的静止状态,并且将确定结果输出至初始姿态估计单元152和位置姿态处理单元151。
150.当确定笔31处于静止状态时,位置姿态处理单元151和初始姿态估计单元152假定其是要执行校准的状态(初始姿态估计状态),并且当确定结果是非静止状态时,假定其是绘制状态并切换操作。
151.在初始姿态估计状态下,位置姿态处理单元151基于从初始姿态估计单元152提供的初始重力方向和绝对方位角和纬度的信息来估计自动旋转分量,并将估计结果提供给初始姿态估计单元152。
152.初始姿态估计单元152基于从多imu 63提供的加速度信息检测笔31的滚动和俯仰的信息作为重力方向的信息,并且将该信息提供给位置姿态处理单元151。
153.此外,初始姿态估计单元152基于从位置姿态处理单元151提供的自动旋转分量来估计偏差分量,并将作为估计结果的偏差分量提供给位置姿态处理单元151。
154.当处于绘制状态时,位置姿态处理单元151基于自动旋转分量和偏差分量校正姿态旋转矩阵,并基于校正的姿态旋转矩阵和多imu 63的检测结果获得笔31的绝对姿态。
155.此外,位置姿态处理单元151对笔31的绝对姿态进行积分,以获得指示笔31的笔尖的轨迹的位置和速度,并且输出该位置和速度。
156.更具体地,位置姿态处理单元151包括姿态估计单元171、自动旋转估计单元172和加速度积分单元173。
157.姿态估计单元171将由获取单元102获取的绝对方位角和纬度的信息提供给自动旋转估计单元172,以估计(计算)自动旋转分量。
158.《自动旋转分量的估计》
159.这里,将描述由自动旋转估计单元172估计(计算)自动旋转分量的方法。
160.例如,如图13所示,当定义作为地球上以纬度lat表示位置的坐标系的全局坐标系(xg,yg,zg)和作为多imu 63的坐标系的传感器坐标系(xs,ys,zs)时,在全局坐标系中表示的自旋分量由以下表达式(1)表示。
161.[表达式1]
[0162][0163]
这里,ω
er
是地球的自旋转量(角速度)并且是15deg/h的固定值,lat是地球上的纬度,并且ω
er_g_x
、ω
er_g_y
和ω
er_g_z
分别表示在图13所示的全局坐标系中在xg轴方向、yg轴方向和zg轴方向的角速度分量。
[0164]
即,如表达式(1)所示,yg轴方向上的分量ω
er_g_y
是零,xg轴方向上的分量ω
er_g_x
是ω
er
cos(lat),并且zg轴方向上的分量ω
er_g_z
是ω
er
sin(lat)。
[0165]
当在这种全局坐标系中表达的自动旋转分量被转换成传感器坐标系时,它由以下表达式(2)表达。
[0166][0167]
这里,ω
er_s_x
、ω
er_s_y
、以及ω
er_s_z
分别是在图13中示出的传感器坐标系统中在xs轴方向、ys轴方向、以及zs轴方向上的角速度分量。此外,f(azimuth,lat)是由绝对方位角和纬度(lat)表示的函数,并且表明传感器坐标系的角速度分量由姿态旋转矩阵ms→g的逆矩阵mg→s乘以全局坐标系的自动旋转分量来表示,所述姿态旋转矩阵ms→g用于将全局坐标系转换成传感器坐标系。
[0168]
该姿态旋转矩阵ms→g(以及逆矩阵mg→s)基于重力方向和绝对方位角唯一地设置。
[0169]
因此,自动旋转估计单元172根据从初始姿态估计单元152的初始重力估计单元181提供的全局坐标系的重力方向的信息以及绝对方位角来设置逆矩阵mg→s,并且基于通过多imu 63检测的传感器坐标系的角速度计算上述表达式(2)以估计(计算)传感器坐标系的自动旋转分量。
[0170]
姿态估计单元171将由自动旋转估计单元172估计(计算)的自动旋转分量提供给初始姿态估计单元152的偏差估计单元182。
[0171]
偏差估计单元182通过从在预定时间内由多imu 63检测的角速度的平均值中减去自动旋转分量来估计偏差分量,并且将偏差分量提供到位置姿态处理单元151的姿态估计单元171。
[0172]
姿态估计单元171通过从由多imu 63检测的角速度中减去自动旋转分量和偏差分量来校正多imu 63的检测结果,并且通过使用校正角速度的姿态计算来更新姿态旋转矩阵ms→g。
[0173]
使用更新的姿态旋转矩阵ms→g,姿态估计单元171将作为多imu 63的检测结果的传感器坐标系中的加速度转换成全局坐标系中的加速度,并且获得加速度作为绝对姿态。
[0174]
加速度积分单元173对作为由姿态估计单元171估计的绝对姿态的加速度进行积分,更新速度和位置,并且与笔31的笔尖的移动一起输出更新的速度和位置作为轨迹的位置信息。
[0175]
当随着以这种方式获得的笔31的笔尖的移动的轨迹的信息被发送到pc 33时,pc 33基于轨迹产生绘制的图像,并且使显示装置34显示绘制的图像。
[0176]
《状态转换》
[0177]
接下来,将参照图14描述与笔型绘图系统11的操作相关的状态转换。
[0178]
如图14所示,存在与笔型绘图系统11的操作相关的五种类型的状态,并且在预定条件下状态转换。
[0179]
具体地说,存在五种状态,包括:初始状态st0、初始姿态估计状态st1、姿态确定状态st2、绘制状态st3、重新姿态估计状态st4。
[0180]
初始状态st0是紧接在接通电源之后的状态或者从开始执行绘制操作的绘制状态的时刻起已经过去预定时间的状态,并且多imu 63的检测精度已经变得低于预定状态并且校准是必要的。
[0181]
初始姿态估计状态st1是笔31直立放置在笔筒32上的状态。
[0182]
姿态确定状态st2是获得初始重力方向和偏差分量并且完成校准的状态。
[0183]
绘制状态st3是其中由用户21从笔筒32取出笔31并且通过按压压敏传感器51打开笔31的状态,并且指示绘图。
[0184]
重新姿态估计状态st4为绘制状态st3,是从指示绘制起至经过预定时间为止未进行绘制的状态。
[0185]
在初始状态st0中,当确定为静止状态时,状态转换至初始姿态估计状态st1,如图14中的箭头tr01所示。
[0186]
在初始姿态估计状态st1,当获得初始重力方向和偏差分量并且校准在静止状态下完成时,状态转换到如图14中的箭头tr12所示的姿态确定状态st2。
[0187]
此外,在初始姿态估计状态st1,当确定直到校准完成才静止时,状态返回至初始状态st0,如图14中的箭头tr10所示。
[0188]
在姿态确定状态st2,当确定不处于静止状态时,假设从笔筒32取出笔31,并且如图14中的箭头tr23所示,状态转换到绘制状态st3。
[0189]
在绘制状态st3,变得能够执行绘图,并且通过惯性导航获得与笔31的笔尖的移动对应的轨迹。
[0190]
注意,在绘制状态下,如果笔31从笔筒32中取出就足够了,即,如果通过惯性导航出现由于多imu 63引起的误差,并且因此是否按压压敏传感器51并且实际执行绘图操作无关紧要。
[0191]
在绘制状态st3中,当确定笔31返回至笔筒32并且处于静止状态直至从绘制状态设置为绘制状态st3的定时过去预定时间时,如图14中的箭头tr34所示,状态转换至重新姿态估计状态st4。
[0192]
在重新姿态估计状态st4中,当确定笔31从笔筒32中取出并且直到从状态设置为绘制状态st3的定时过去预定时间之前不静止时,状态返回至绘制状态st3。
[0193]
另外,在绘制状态st3中,当从设定为绘制状态st3的定时起经过了预定时间时,状态转移到初始状态st0。
[0194]
此外,在重新姿态估计状态st4中,当从状态设置为绘制状态st3的定时过去预定时间时,静止状态(即,笔31直立放置在笔筒32上的状态)继续。因此,初始重力方向和偏差分量照原样获得,校准完成,并且状态转换成如图14中的箭头tr42所示的姿态确定状态st2。
[0195]
即,当笔31通电时,状态变为初始状态st0,并且此外,当假设笔直立放置在笔筒32上并且静止时,笔31的状态转换至初始姿态估计状态st1。
[0196]
当状态转换至初始姿态估计状态st1时,设置初始重力方向和偏差分量并且执行校准,并且当完成校准时,状态转换至姿态确定状态st2。
[0197]
此时,发光单元52发光,表明校准的完成,并且用户识别绘制操作是可能的。
[0198]
然后,当笔31被从笔筒32取出并且被假定为不静止时,状态转换到绘制状态st3。
[0199]
当从转变至绘制状态st3起的经过时间短于预定时间(例如,10秒)时,如果笔31返回至笔筒32并且被假定为处于静止状态,则状态转变至重新姿态估计状态st4。
[0200]
这里,在再姿态估计状态st4中,在从转变至绘制状态st3起的经过时间短于预定时间(例如,10秒)的状态下,当笔31再次从笔筒32取出并且假定为不静止时,该状态再次转变至绘制状态st3。
[0201]
此外,在绘制状态st3中,当从转换到绘制状态st3起的经过时间短于预定时间(例如,10秒)并且假定处于静止状态的状态下笔31返回至笔筒32时,该状态再次转换到重新姿态估计状态st4。
[0202]
即,在绘制状态st3中,如果从转变成绘制状态st3所经过的时间短于预定时间(例如,10秒),如果笔31从笔筒32中取出,那么变成绘制状态st3,并且如果笔返回至笔筒32,那么变成重新姿态估计状态st4。
[0203]
然后,在绘制状态st3中,在从转变至绘制状态st3的经过时间已经过去了预定时间(例如,10秒)之后,发光单元52关断,状态返回至初始状态st0,并且继续随后的状态转换。
[0204]
此外,在重新姿态估计状态st4中,在从转变至绘制状态st3的经过时间已经过去了预定时间(例如,10秒)之后,笔31处于被直立放置在笔筒32上的状态并且因此处于与初始姿态估计状态st1相同的状态。由此,初始重力方向和偏差分量被原样设定,进行校准,当校准完成时,状态转变为姿态确定状态st2。
[0205]
笔31的控制处理是对应于如图14所示的状态转换的处理。
[0206]
《控制处理》
[0207]
接下来,将参照图15的流程图描述笔31的控制处理。
[0208]
在步骤s51中,获取单元102获取笔31的绝对方位角和纬度的信息,并且经由外部i/f 134将该信息提供给惯性导航处理单元131。惯性导航处理单元131的位置姿态处理单元151中的姿态估计单元171保持从获取单元102提供的绝对方位角和纬度的信息。
[0209]
这里,例如,由获取单元102获取的笔31的绝对方位角和纬度的信息可被获取为通过用户对键盘等的操作输入的信息。此外,关于纬度的信息,可以通过全球导航卫星系统(gnss)设备等获取基于来自未示出的卫星的信号检测的信息。注意,只要假设笔筒32的位置、丁香等不改变,则仅需要给出一次绝对方位角和纬度的信息,因此在第一次获取之后可跳过步骤s51中的处理。此外,信息可以与处理分开地预先获取并存储在控制单元101中。
[0210]
在步骤s52中,位置姿态处理单元151获取并且缓冲从多imu 63提供的角速度和加速度的一个样本的信息。
[0211]
在步骤s53中,位置姿态处理单元151执行状态转变处理,并且确定并转变笔31的控制处理中的状态。
[0212]
要注意的是,稍后参照图16的流程图,详细描述状态转换处理。
[0213]
在步骤s54中,位置姿态处理单元151确定当前状态是否为初始状态st0。
[0214]
在步骤s54中,在当前状态不是初始状态st0的情况下,处理进行至步骤s55。
[0215]
在步骤s55中,位置姿态处理单元151确定当前状态是否为绘制状态st3。
[0216]
在步骤s55中确定当前状态不是绘制状态的情况下,处理进行至步骤s56。
[0217]
在步骤s56中,初始姿态估计单元152的初始重力估计部181执行用于估计初始重力方向的初始重力估计处理。
[0218]
要注意的是,稍后参照图17的流程图,详细描述初始重力估计处理。
[0219]
在步骤s57中,初始姿态估计单元152的偏差估计单元182执行用于估计偏差分量的偏差估计处理。
[0220]
要注意的是,稍后参照图18的流程图,详细描述偏差估计处理。
[0221]
此外,在步骤s55中确定当前状态是绘制状态的情况下,处理进行至步骤s58。
[0222]
在步骤s58中,位置姿态处理单元151执行绘制处理并向pc33提供指示与笔31的笔尖的移动相对应的轨迹的位置信息。当获取与轨迹对应的位置信息时,pc33生成与位置信息对应的绘制图像并且使显示装置34显示绘制图像。
[0223]
要注意的是,稍后参照图19中的流程图,详细描述绘图处理。
[0224]
此外,在步骤s54中确定当前状态不是初始状态的情况下,跳过步骤s55至s58中的处理。
[0225]
在步骤s59中,位置姿态处理单元151确定是否指示了处理结束。
[0226]
在步骤s59中,在没有指示处理结束的情况下,处理返回到步骤s52。
[0227]
即,重复步骤s52至s59的处理,直到指示处理结束。
[0228]
然后,在步骤s59中,当指示处理结束时,处理结束。
[0229]
通过执行上述一系列处理,控制笔31的操作,并且用户21抓握笔31并移动笔尖,使得获得与笔尖的移动对应的轨迹,并且可以在显示装置34上显示与轨迹对应的绘制的图像。
[0230]
应注意,通过步骤s56和s57中的初始重力估计处理和偏差估计处理获得自动旋转分量和偏差分量,基本上实现参考图9的流程图描述的校准处理。
[0231]
即,通过稍后描述的初始重力估计处理获得重力方向,通过稍后描述的偏差估计处理从纬度的信息获得全局坐标系的自动旋转分量,姿态旋转矩阵ms→g的逆矩阵mg→s基于重力方向和绝对方位角获得,全局坐标系的自动旋转分量由逆矩阵mg→s转换为传感器坐标系的自动旋转分量,传感器坐标系的偏差分量由多imu 63在静止姿态下检测的角速度平均值和传感器坐标系的自动旋转分量之差得到。
[0232]
这里,由于传感器坐标系的自动旋转分量是通过纬度、重力方向和绝对方向获得的,因此不需要在静止姿态下由多imu 63检测到的信息。此外,由于偏差分量是从由静止姿态下的多imu 63检测的信息和自动旋转分量中获得的,因此可以在一种类型的静止姿态下实现校准。
[0233]
《状态转换处理》
[0234]
接下来,将参考图16的流程图描述状态转换处理。
[0235]
在步骤s71中,静止确定单元153确定角速度和加速度的信息(其是多imu 63的检
测结果)是否已经缓冲了预定时间(例如,一秒)。
[0236]
在步骤s71中确定作为多imu 63的检测结果的角速度和加速度的信息已经缓冲了预定时间的情况下,处理进行至步骤s72。
[0237]
应注意,在步骤s71中确定作为多imu 63的检测结果的角速度和加速度的信息没有被缓冲达预定时间的情况下,状态转换处理结束。
[0238]
在步骤s72中,静止确定单元153基于作为多imu 63的检测结果的角速度和加速度的缓冲信息来确定笔31是否是静止的。
[0239]
在步骤s72中确定静止的情况下,处理进行至步骤s73。
[0240]
在步骤s73中,姿态估计单元171确定当前状态是否为初始状态st0。
[0241]
在步骤s73中确定当前状态不是初始状态st0的情况下,处理进行至步骤s74。
[0242]
在步骤s74中,姿态估计单元171确定当前状态是否为绘制状态st3。
[0243]
在步骤s74中确定当前状态是绘制状态st3的情况下,处理进行至步骤s75。
[0244]
在步骤s75中,姿态估计单元171如图14的箭头tr34所示那样将当前状态转移到重新姿态估计状态st4。
[0245]
注意,在步骤s74中确定当前状态不是绘制状态st3的情况下,跳过步骤s75中的处理。
[0246]
此外,在步骤s73中确定当前状态是初始状态st0的情况下,处理进行至步骤s76。
[0247]
在步骤s76中,姿态估计单元171转换到初始姿态估计状态st1,如图14中的箭头tr01所示。
[0248]
另一方面,在步骤s72中,在不静止并且笔31从笔筒32取出并且假定存在一些移动的情况下,处理进行至步骤s77。
[0249]
在步骤s77中,姿态估算单元171将初始重力确定标识设定为零,设定为未获得初始重力方向的信息。
[0250]
在步骤s78中,姿态估计单元171确定当前状态是否是初始姿态估计状态st1。
[0251]
在步骤s78中确定当前状态不是初始姿态估计状态st1的情况下,处理进行至步骤s79。
[0252]
在步骤s79中,姿态估计单元171确定当前状态是姿态确定状态st2还是重新姿态估计状态st4。
[0253]
在步骤s79中,在当前的状态是姿态确定状态st2或者重新姿态估计状态st4的情况下,处理进入步骤s80。
[0254]
在步骤s80中,姿态估计单元171如图14的箭头tr23或tr43所示那样将当前状态转移到绘制状态st3。
[0255]
另外,在步骤s79中,在当前的状态不是姿态确定状态st2、也不是重新姿态估计状态st4的情况下,结束处理。
[0256]
此外,在步骤s78中确定当前状态是初始姿态估计状态st1的情况下,处理进行至步骤s80。
[0257]
在步骤s80中,姿态估计单元171如图14的箭头tr10所示,将当前状态转移到初始状态st0。
[0258]
通过上述一系列处理,控制参照图14描述的状态转换。
[0259]
《初始重力估计处理》
[0260]
接下来,将参照图17的流程图描述初始重力估计处理。
[0261]
在步骤s101中,初始姿态估计单元152的初始重力估计单元181确定作为多imu 63的检测结果的加速度是否被缓冲了预定时间(例如,一秒)。
[0262]
在步骤s101中确定作为多imu 63的检测结果的三个轴的加速度缓冲预定时间(例如,一秒)的情况下,处理进行至步骤s102。
[0263]
在步骤s102中,初始重力估计单元181计算缓冲的三个轴的加速度的平均值作为重力信息。
[0264]
在步骤s103中,初始重力估算单元181将计算出的初始重力的信息提供给位置姿态处理单元151的姿态估算单元171。
[0265]
在步骤s104中,姿态估算单元171将初始重力确定标识设为1,作为表示设定了初始重力的信息的信息。
[0266]
应注意,在步骤s101中,在确定作为多imu 63的检测结果的三个轴的加速度在预定时间(例如,一秒)内不被缓冲并且不能获得初始重力的情况下,处理进行至步骤s105。
[0267]
在步骤s105中,姿态估算单元171将初始重力确定标识设定为零,作为表示未设定初始重力的信息的信息。
[0268]
通过上述处理,设定了初始重力,并且根据是否设定了初始重力来设定初始重力确定标识。
[0269]
《偏差估计处理》
[0270]
接下来,将参照图18的流程图描述偏差估计处理。
[0271]
在步骤s121中,初始姿态估计单元152的偏差估计单元182对位置姿态处理单元151的姿态估计单元171进行询问,确定初始重力确定标识是否为1并确定初始重力。
[0272]
在步骤s121中确定初始重力确定标识被设置为1并且确定初始重力方向的情况下,处理进行至步骤s122。
[0273]
在步骤s122中,确定从多imu 63提供的检测结果中的由陀螺仪传感器检测到的三个轴的角速度信息是否缓冲了预定时间,例如,10秒钟。
[0274]
在步骤s122中确定三个轴的角速度的信息已经被缓冲了预定时间(例如,10秒)的情况下,处理进行至步骤s123。
[0275]
在步骤s123中,偏差估计单元182计算三个轴的角速度的10秒的平均值作为偏差分量和自动旋转分量的总和。即,由于笔31在这里处于静止状态,所以三个轴的角速度的平均值被计算为偏差分量和自动旋转分量之和的平均值。
[0276]
在步骤s124中,姿态估计单元171基于所获得的初始重力方向和保持的绝对方位角设置姿态旋转矩阵ms→g的逆矩阵mg→s,并且将逆矩阵mg→s供应至自动旋转估计单元172。
[0277]
在步骤s125中,如参考表达式(1)所描述的,自动旋转估计单元172基于所保持的纬度信息来估计(计算)全局坐标系的自动旋转分量。然后,自动旋转估计单元172通过参考图13和表达式(2)描述的方法通过使用逆矩阵mg→s的信息将全局坐标系的自动旋转分量转换成传感器坐标系的自动旋转分量,并且将自动旋转分量提供给姿态估计单元171。
[0278]
姿态估计单元171将由自动旋转估计单元172估计(计算)的自动旋转分量提供给初始姿态估计单元152的偏差估计单元182。
[0279]
在步骤s126中,偏差估计单元182通过从三个轴的角速度的平均值中减去传感器坐标系的自动旋转分量来估计(计算)传感器坐标系的偏差分量,并将偏差分量输出到姿态估计单元171。
[0280]
在步骤s127中,姿态估算单元171将当前状态转变为姿态确定状态st2。
[0281]
在步骤s128中,姿态估算单元171将表示当前的状态是姿态确定状态st2的信息通知给发光控制单元132。通过该通知,发光控制单元132使发光单元52的led 142发光,从而表明校准已经由用户完成并且处于绘制可能状态。
[0282]
在步骤s129中,姿态估计单元171将绘制时间设定为零。
[0283]
另一方面,在步骤s121中确定初始重力确定标识被设置为零并且没有确定初始重力的情况下,或者在步骤s122中确定轴的角速度的信息没有缓存预定时间(例如,10秒)的情况下,处理进行至步骤s130。
[0284]
在步骤s130中,姿态估算单元171向发光控制单元132通知表示当前状态不是姿态确定状态st2的信息。通过该通知,发光控制单元132关断发光单元52的led 142,以表明校准未由用户完成并且不处于绘制可能状态。
[0285]
通过上述处理,在设置初始重力之后估计(计算)传感器坐标系的偏差分量,并且当估计偏差分量时发光单元52发光,使得当估计传感器坐标系的偏差分量并且完成校准时,可以向用户呈现其处于可绘制状态。
[0286]
《绘制处理》
[0287]
接下来,将参照图19的流程图描述绘制处理。
[0288]
在步骤s151中,姿态估计单元171通过从由多imu 63检测的三个轴的角速度中减去传感器坐标系的自动旋转分量和偏差分量来校正角速度。
[0289]
在步骤s152中,姿态估计单元171基于校正的角速度信息通过姿态计算更新姿态旋转矩阵ms→g。
[0290]
在步骤s153中,姿态估计单元171通过更新的姿态旋转矩阵ms→g将通过多imu 63检测的加速度转换成全局坐标系中的加速度,获得笔31的绝对姿态,并且将绝对姿态输出至加速度积分单元173。
[0291]
在步骤s154中,加速度积分单元173计算一个先前采样的时间和当前时间之间的时间差。
[0292]
在步骤s155中,加速度积分单元173通过将通过将当前加速度乘以时间差获得的速度的变化量与当前速度相加来更新速度。
[0293]
在步骤s156中,加速度积分单元173通过将通过将当前速度与时间差相乘而获得的位置的变化量与当前位置相加来更新位置。
[0294]
在步骤s157中,加速度积分单元173经由外部i/f 134将位置和速度的信息发送到pc 33,作为指示笔31的笔尖的轨迹的位置信息。pc 33基于包括位置和速度的信息的指示笔31的笔尖的轨迹的位置信息生成绘制的图像,并且使显示装置34显示绘制的图像。
[0295]
在步骤s158中,姿态估计单元171将绘制时间增加预定时间来更新绘制时间。
[0296]
在步骤s159中,姿态估计单元171确定绘制时间是否经过了预定时间(例如10秒)、加速度累计部173的累计误差是否增加、位置精度是否低于预定状态并需要进行校正。
[0297]
在步骤s159中确定绘制时间已经过去了预定时间、加速度积分单元173的积分误
差已经增加、位置精度已经变得低于预定状态并且校准是必要的情况下,处理进行至步骤s160。
[0298]
在步骤s160中,姿态估计单元171将当前状态转变为初始状态st0。
[0299]
在步骤s161中,姿态估计单元171将绘制时间初始化为零。
[0300]
在步骤s162中,姿态估计单元171将表示当前状态是初始状态st0的信息通知给发光控制单元132。通过该通知,发光控制单元132关断发光部52的led 142,向用户表明校准未完成而无法进行绘制。
[0301]
应注意,在步骤s159中确定绘制时间未经过预定时间(例如,10秒)并且不需要校准的情况下,跳过步骤s160至s162中的处理,并且发光的发光单元52持续表明其处于绘制可能状态。
[0302]
根据上述处理,通过绝对方位角和纬度的信息计算引起多imu 63中的误差的自动旋转分量,并且利用所获得的自动旋转分量和笔31直立放置在笔筒32上的一种类型的静止姿态来获得偏差分量,使得可以实现容易且适当的校准。
[0303]
《变形例1》
[0304]
在以上描述中,已经描述了实例,在该实例中,笔31直立放置在笔筒32上,当校准完成时发光单元52发光,笔31从笔筒32取出,并且当从开始绘制操作起已经过去预定时间并且通过加速度的积分处理绘制位置的可靠性变得低于预定状态时,发光单元52关断。
[0305]
即,已经描述了根据发光单元52的发光状态表明校准已经完成或者绘制位置的可靠性变得低于预定状态的实例。
[0306]
然而,可以在显示装置34上显示的绘制图像中呈现类似信息。
[0307]
例如,如图20所示,当利用笔31执行绘制操作以在显示装置34的显示表面中从起始点p沿箭头方向绘制时,可利用对应于绘制位置的可靠性的深度以及绘制操作的经过时间来执行绘制。
[0308]
即,在图20中,靠近开始点p的绘图显示为深色,但是随着绘图操作的进行,颜色可以随着经过的时间(即,随着可靠性的降低)变得更浅并逐渐模糊,最终达到无颜色添加并且不能执行绘制的状态。
[0309]
以这种方式,用户可以在观看显示装置34上显示的绘制图像的同时识别可靠性的降低程度,并且通过无颜色添加并且不能执行绘制的状态可以识别绘制位置的可靠性低于预定状态并且需要校准。
[0310]
《变形例2》
[0311]
在以上描述中,上面已经描述了实例,在该实例中,通过将笔31直立放置使得将笔31的压敏传感器51与笔筒32的盖84的凹部84a彼此面对,笔筒32与笔31之间的位置关系被配置为恒定关系。
[0312]
然而,可以使用任何其他配置,只要笔31与笔筒32之间的位置关系能够保持恒定即可。
[0313]
例如,如图21的左侧部分所示,可使用设置有突出部分31a'的笔31'和设置有在相应位置处具有切口部分的孔32a'的笔筒32'。
[0314]
即,当包括笔31'的突出部分31a'的截面形状和笔筒32'的孔32a'的截面形状匹配时,笔31'可直立放置在笔筒32'上,并且因此相互位置关系可保持恒定。
[0315]
应注意,图21是孔32a'的俯视图,其中笔31'直立放置在笔筒32'上。
[0316]
此外,如在图21的中心部分中所示,可以形成多边形笔31”并且可以设置突出部分31a”,并且具有切口部分的孔32a”可以设置在笔筒32”的相应位置处。
[0317]
即,当在笔31”中包括突出部分31a”的截面形状和笔筒32”的孔32a”的截面形状匹配时,笔31”可直立放置在笔筒32”上,并且因此相互位置关系可保持恒定。
[0318]
此外,如图21的右侧部分所示,可使用构造为不对称形状的笔31”',并且可在笔筒32”'中设置相应的不对称孔32a”'。
[0319]
即,当笔31”'中的包括突起部31a”'的截面形状和笔筒32”'的孔32a”'的截面形状匹配时,笔31”'可直立放置在笔筒32”'上,因此可保持相互位置关系恒定。
[0320]
《变形例3》
[0321]
在以上描述中,已经描述了这样的配置:笔筒32由具有中空部分的透明丙烯酸树脂形成,并且中空部分填充有着色液体,使得可以在视觉上识别笔31的发光单元52的发光状态。
[0322]
然而,只要笔31的发光单元52的发光状态可以由用户视觉识别,可以采用任何其他配置,并且例如,如图22的笔筒201所示,单独设置的发光单元212可以根据笔31的发光单元52的发光或关断状态发光或关断。
[0323]
此时,例如,如图22所示,发光单元212可以包括发射不同颜色的光的多个led 212a至212c,并且可以根据按压切换开关211的次数切换发射光的颜色。
[0324]
例如,在图22的左部中示出的led 212a至212c中,led 212a被配置为当切换开关211被按压一次时发光,从而以如由笔筒201'表示的颜色发光。
[0325]
然后,如图21的右侧部分所示,可被配置为使得当切换开关211被按压两次并且笔31下一次被直立放置时,led 212b被配置为代替led 212a发光。在这种情况下,当笔31直立放置在笔筒201'上时,如由笔筒201”所示,光可以以与笔筒201'的颜色不同的颜色发射。
[0326]
在这种情况下,可以通过诸如蓝牙(注册商标)的短距离无线通信通知笔筒201和笔31已经由笔筒201的切换开关211切换颜色,并且在显示装置34上显示的绘制线的颜色可以根据从led 212a至212c发射的光的颜色而改变。
[0327]
《《2.应用实例》》
[0328]
在以上描述中,已经描述了通过使用gnss或者用户输入等获取绝对方位角信息的实例。然而,多imu可以内置在笔筒中,使得可以由笔筒检测绝对方位角,当笔被直立放置在笔筒上时,可以由笔从笔筒获取绝对方位角的信息,并且可以通过在笔和笔筒之间的协作处理来实现校准。
[0329]
即,内置有多imu并且能够检测绝对方位角的笔筒301基于两种类型的静态姿态检测绝对方位角,并且将检测的绝对方位角提供至笔331。
[0330]
更具体地,如图23的最左侧部分所示,在以第一静止姿态过去预定时间之后,例如,当笔筒301旋转90度并且以第二静止姿态过去预定时间时,如图23中从左起第二部分所示,笔筒301以两种类型的静止姿态通过多imu获取两种类型的检测结果,并且基于所获取的两种类型的检测结果获取绝对方位角。
[0331]
因为笔筒301一旦被放置通常较不频繁地移动,所以笔筒301被放置成使得用户采取两种静止姿态,使得当笔筒首先被放置时检测绝对方位角。
[0332]
此后,如在图23中从右侧起的第二部分中示出的,当笔331被直立放置在笔筒301上时,例如,通过诸如wi-fi的通信将获得的绝对方位角从笔筒301传输至笔331。
[0333]
此后,如图23的最右侧部分中所示,通过与上述方法相似的方法实现笔331的校准。
[0334]
《笔筒与笔之间的方位差》
[0335]
在校准时,从笔筒301提供的绝对方位角是基于笔筒301的正面方向的值,并且与笔331的正面方向不同。
[0336]
因而,笔331预先获得笔筒301和笔331之间的方位差,校正从笔筒301提供的绝对方位角,并且执行校准。
[0337]
更具体地,如图24所示,笔筒301的正面方向d1和作为笔331的压敏传感器51的位置的正面方向d2之间的差是方位角差θ。
[0338]
由此,笔331从笔筒301提供的绝对方位角减去方位角差θ作为对笔331的绝对方位角的校正,并使用该绝对方位角进行校准。注意,该方位角差θ是固定值,因此,可以预先相对于笔331从外部获取。
[0339]
《笔筒的绝对方位角的更新》
[0340]
笔筒301一旦被放置就基本上以低频移动,但是在添加变化使得在获得绝对方位角之后方向旋转90度(如图25中所示的笔筒301'所示)的情况下,可通过加速度积分进行更新,或者可通过使用两种类型的静态姿态的校准再次获得绝对方位角。
[0341]
《通过笔与笔筒之间的协作处理实现校准的笔型绘图系统的硬件配置实例》
[0342]
接下来,将参考图26描述通过笔与笔筒之间的协作处理来实现校准的笔型绘图系统的硬件配置实例。
[0343]
注意,在图26中,pc 33和显示装置34的配置与参考图10描述的配置相似,因此,省略其描述。
[0344]
笔331包括控制单元351、获取单元352、通信单元353、多imu 354、发光单元355和压敏传感器356,它们通过总线361电连接并且可以彼此通信。
[0345]
注意,控制单元351、获取单元352、通信单元353、多imu 354、发光单元355以及压敏传感器356的配置基本上与图10中的控制单元101、获取单元102、通信单元103、多imu 63、发光单元52以及压敏传感器51的配置相似,因此,省略其描述。
[0346]
然而,获取单元352预先获取并保持由操作键盘等的用户21输入的纬度与笔筒301之间的方位角差的信息。此外,获取单元352控制通信单元353与笔筒301通信以获取绝对方位角的信息,并且控制单元351使用这些信息进行校准。在这些方面,控制单元351和获取单元352与图10中的控制单元101和获取单元102不同。
[0347]
笔筒301包括通过总线391电连接并且可彼此通信的控制单元381、通信单元382和多imu 383。
[0348]
注意,通信单元382和多imu 383的配置基本上具有与笔31的通信单元103和多imu 63的配置类似,并且因此省略其描述。
[0349]
控制单元381的基本配置类似于笔31的控制单元101的基本配置,但是不同之处在于,控制单元基于两种类型的静态姿态中的多imu 383的检测结果来获得笔筒301的绝对方位角,控制通信单元382,并且将该绝对方位角发送到笔331的通信单元353。
[0350]
《由图26中的笔筒的控制单元实现的功能》
[0351]
接下来,将参考图27描述由图26的笔筒301的控制单元381实现的功能。
[0352]
控制单元381包括惯性导航处理单元401和外部i/f 402。应注意,惯性导航处理单元401和外部i/f 402与图11中的惯性导航处理单元131和外部i/f 134基本相同,但是不同之处在于未执行发光控制单元132和压敏传感器处理单元133上的处理。
[0353]
此外,图11的惯性导航处理单元131的不同之处在于获取单元102获取绝对方位角和纬度的信息,并且在一种类型的静止姿态下基于从多imu 63提供的检测结果执行校准,而惯性导航处理单元401仅被给予纬度的信息并且在两种类型的静止姿态下基于从多imu 383提供的检测结果获得绝对方位角。
[0354]
具体地,惯性导航处理单元401包括位置姿态处理单元411、初始姿态估计单元412以及静止确定单元413。
[0355]
位置姿态处理单元411、初始姿态估计单元412和静止确定单元413基本上具有类似于图12中的位置姿态处理单元151、初始姿态估计单元152和静止确定单元153的功能。
[0356]
然而,由于没有给出绝对方位角,所以初始姿态估计单元412基于由多imu 383在两种类型的静态姿态下检测到的检测结果获得绝对方位角和偏差分量,并且将绝对方位角和偏差分量提供到位置姿态处理单元411。
[0357]
由位置姿态处理单元411基于由初始姿态估计单元412提供的绝对方位角的信息和由外部i/f 402提供的纬度执行的校准处理与图12中的位置姿态处理单元151的处理相似。
[0358]
更具体地,位置姿态处理单元411包括姿态估计单元431和加速度积分单元432。
[0359]
应注意,姿态估计单元431和加速度积分单元432具有与图12中的姿态估计单元171和加速度积分单元173相同的功能,并且因此省略其描述。
[0360]
然而,因为自动旋转分量由初始姿态估计单元412获得,所以没有对应于图12中的自动旋转估计单元172的配置,并且因此在姿态估计单元431中的处理中省略对自动旋转分量的处理。
[0361]
初始姿态估计单元412包括初始重力估计单元451和初始方位角偏差估计单元452。
[0362]
应注意,初始重力估计单元451与图12中的初始重力估计单元181相似,因此,省略其描述。
[0363]
初始方位偏差估计单元452基于多imu 383在两种类型的静态姿态下的检测结果获得自动旋转分量和偏差分量,进一步从自动旋转分量获得初始方位角,并且将初始方位角提供至位置姿态处理单元411的姿态估计单元431。
[0364]
注意,用于获得自动旋转分量和偏差分量的方法和用于基于多imu383在两种类型的静态姿态下的检测结果从自动旋转分量获得初始方位的方法是一般处理,因此省略其描述。
[0365]
《笔与笔筒之间的协作处理》
[0366]
接下来,将参考图28的流程图描述笔331与笔筒301之间的协作处理。
[0367]
注意,这里,在笔筒301中,描述仅用于将绝对方位角提供至笔331的处理,并且省略在笔筒301中获得姿态的处理,但是如在笔31中,也执行获得自身姿态的处理。
[0368]
在步骤s211中,初始姿态估计单元412的初始方位角偏差估计单元452基于由多imu 383在两种类型的静态姿态下检测到的加速度和角速度来计算偏差分量和自动旋转分量,基于自动旋转分量来计算绝对方位角,并且将绝对方位角的信息提供给位置姿态处理单元411的姿态估计单元431。
[0369]
在步骤s212中,姿态估计单元431确定是否从初始方位角偏差估计单元452提供了绝对方位角的信息。
[0370]
在步骤s212中,重复步骤s211和s212中的处理,直到假设已经从初始方位角偏差估计单元452提供了绝对方位角的信息。
[0371]
然后,在步骤s212中确定已经从初始方位角偏差估计单元452提供了绝对方位角的信息的情况下,处理进入步骤s213。
[0372]
在步骤s213中,姿态估计单元431存储从初始方位角偏差估计单元452获取的绝对方位角的信息。
[0373]
在步骤s214中,姿态估计单元431控制通信单元382经由外部i/f402将绝对方位角信息发送到笔331。
[0374]
通过至此的处理,初始绝对方位角的信息被发送到笔331。
[0375]
在步骤s215中,姿态估计单元431控制静止确定单元413以基于由多imu 383检测的加速度和角速度确定是否静止,并且确定是否不静止,即,是否移动、旋转笔筒301等。
[0376]
在步骤s215中确定笔筒301不是静止的并且已经移动、旋转等的情况下,处理前进到步骤s216。
[0377]
在步骤s216中,姿态估计单元431将存储的绝对方位角的信息提供给加速度积分单元432以基于加速度的积分结果被更新,然后获取并存储该信息。
[0378]
在步骤s217,姿态估计单元431控制通信单元382经由外部i/f402将更新后的绝对方位角信息发送到笔331。
[0379]
注意,在步骤s215中确定静止的情况下,跳过步骤s216和s217中的处理。
[0380]
在步骤s218中,姿态估计单元431确定是否指示了处理结束,在没有指示结束的情况下,返回到步骤s215。
[0381]
即,重复步骤s215至s218中的处理直到指示处理结束,并且当移动或旋转笔筒301时,绝对姿态被更新并被发送到笔331。
[0382]
另一方面,在笔331中,在步骤s231中,笔331的控制单元351控制获取单元352以获取纬度和方位角差的信息。
[0383]
在步骤s232中,控制单元351控制通信单元353以确定是否已经从笔筒301发送了绝对方位角。
[0384]
在步骤s232中,在通过上述步骤s214或s217中的处理从笔筒301发送绝对方位角的情况下,处理进行到步骤s233。
[0385]
在步骤s233中,控制单元351控制通信单元353获取并存储从笔筒301发送的绝对方位角的信息。
[0386]
在步骤s234中,控制单元351从所获取的笔筒301的绝对方位角减去方位角差,作为对笔331的绝对方位角的校正。
[0387]
此后,使用通过利用差方位角校正笔筒301的更新的新绝对方位角而获得的笔331
的绝对方位角的信息执行参考图15的流程图描述的控制处理。然而,在这种情况下,通过用通过用方位角差校正从笔筒301提供的绝对方位角而获得的绝对差替换在图15中的步骤s51的处理中获取的绝对方位角来执行处理。
[0388]
在步骤s235中,控制单元351确定是否指示了处理结束,在未指示结束的情况下,返回到步骤s232。
[0389]
然后,在步骤s235中已经指示结束的情况下,处理结束。
[0390]
如上所述,由于通过笔331和笔筒301之间的协作处理来执行校准,所以基于从笔筒301提供的绝对方位角来执行笔331的控制处理,因此,用户不需要提供绝对方位角的信息。
[0391]
此外,由于每次移动或旋转笔筒301时保持更新绝对方位角的信息,所以用户可自由地改变笔筒301的位置和方向而无需意识到校准。
[0392]
此外,在上面的描述中,已经描述了这样的实例,其中,每次笔筒301移动或旋转时执行的绝对方位角的更新通过加速度积分单元432利用积分值来更新,但是绝对方位角可以通过重复执行步骤s211至s214中的处理来更新。
[0393]
《笔与笔筒之间的协作处理的变形例》
[0394]
在以上描述中,已经描述了每当在笔筒301中获得绝对方位角时将绝对方位角发送到笔331的实例,但是可以在笔331被直立放置在笔筒301上时将绝对方位角发送到笔331。
[0395]
因此,将参考图29的流程图描述笔331与笔筒301之间的协作处理的变形例,其中,当笔331被直立放置在笔筒301上时,绝对方位角被发送到笔331。
[0396]
要注意的是,在图29的流程图中的步骤s261到s263中的处理与在图28的流程图中的步骤s211到s213中的处理相似,因此,省略其描述。
[0397]
当通过步骤ss261至s263中的处理获得绝对方位角时,处理进行至步骤s264。
[0398]
在步骤s264中,姿态估计单元431控制通信单元382,以确定笔331是否已通知其直立放置在笔筒301上,并且当笔331已通知其直立放置在笔筒301上时,处理进行到步骤s265。
[0399]
在步骤s265中,姿态估计单元431控制通信单元382经由外部i/f402将绝对方位角的信息发送到笔331。
[0400]
在步骤s266,姿态估计单元431控制静止确定单元413以基于由多imu 383检测的加速度和角速度确定是否静止,并且确定是否不静止,即,是否移动、旋转笔筒301等。
[0401]
在步骤s266中确定笔筒301不是静止的并且已经移动、旋转等的情况下,处理进行至步骤s267。
[0402]
在步骤s267中,姿态估计单元431将存储的绝对方位角的信息提供给加速度积分单元,并且使加速度积分单元432基于加速度的积分结果来更新、获取和存储绝对方位角的信息。
[0403]
注意,在步骤s266中确定是静止的情况下,跳过步骤s267中的处理。
[0404]
在步骤s268中,姿态估计单元431确定是否指示了处理结束,在未指示结束的情况下,返回到步骤s264。
[0405]
即,重复步骤s264至s268中的处理,直到指示处理结束,并且当移动或旋转笔筒
301时,更新绝对方位角。然后,当笔331通知其直立放置在笔筒301上时,绝对方位角从笔筒301被发送到笔331。
[0406]
另一方面,在笔331中,在步骤s281,笔331的控制单元351控制获取单元352获取纬度和方位角差的信息。
[0407]
在步骤s282中,控制单元351基于由多imu 354检测的加速度和角速度确定是否静止,即,笔331被直立放置在笔筒301上并且是否静止。
[0408]
在步骤s282中确定笔331是静止的(即,笔331被直立放置在笔筒301上并且是静止的)的情况下,处理进行至步骤s283。
[0409]
在步骤s283中,控制单元351控制通信单元353通知笔筒301笔直立放置在笔筒301上。
[0410]
在步骤s284中,控制单元351控制通信单元353确定是否已从笔筒301发送了绝对方位角。
[0411]
即,通过步骤s283中的处理,在步骤s264中确定笔331已经直立放置在笔筒301上,并且通过步骤s265中的处理发送绝对方位角。
[0412]
因而,在步骤s284中,由于绝对方位角从笔筒301发送,所以处理进入步骤s285。
[0413]
在步骤s285,控制单元351控制通信单元353获取并存储从笔筒301发送的绝对方位角的信息。
[0414]
在步骤s286,控制单元351从所获取的笔筒301的绝对方位角减去方位角差,作为对笔331的绝对方位角的校正。
[0415]
此后,使用通过利用差方位角校正笔筒301的更新的新绝对方位角而获得的笔331的绝对方位角的信息执行参考图15的流程图描述的控制处理。然而,在这种情况下,通过用通过用方位角差校正从笔筒301提供的绝对方位角而获得的绝对差替换在图15中的步骤s51的处理中获取的绝对方位角来执行处理。
[0416]
在步骤s287中,控制单元351确定是否指示了处理结束,在没有指示结束的情况下,返回到步骤s282。
[0417]
然后,在步骤s287已经指示结束的情况下,处理结束。
[0418]
注意,在步骤s282中确定不是静止的并且笔331没有直立放置在笔筒301上的情况下,或者在步骤s284中没有发送绝对方位角的情况下,处理进行到步骤s287。
[0419]
通过上述处理,基于从笔筒301提供的绝对方位角执行笔331的控制处理,因此,用户不需要提供绝对方位角的信息。
[0420]
此外,由于每当笔331直立放置在笔筒301上时绝对方位角从笔筒301发送到笔331,因此即使每当笔筒301移动或旋转时绝对方位角的信息被更新,直到笔331直立放置在笔331上之前绝对方位角不被发送,并且仅当笔331直立放置时被发送。
[0421]
此外,在以上描述中,已经描述了实例,其中,每次笔筒301移动或旋转时执行的绝对方位角的更新通过加速度积分单元432积分值更新,但是可以重复执行步骤s261至s263中的处理。
[0422]
《《3.通过软件执行的实例》》
[0423]
图30示出了通用计算机的配置实例。该个人计算机包括中央处理单元(cpu)1001。输入-输出接口1005经由总线1004连接到cpu 1001。只读存储器(rom)1002和随机存取存储
器(ram)1003连接到总线1004。
[0424]
输入单元1006、输出单元1007、存储单元1008和通信单元1009连接至输入输出接口1005,输入单元1006包括诸如键盘和鼠标的输入装置,用户通过输入装置输入操作命令,输出单元1007向显示装置输出处理操作画面和处理结果的图像,存储单元1008包括硬盘驱动器等并存储程序和各种数据,通信单元1009包括局域网(lan)适配器等并经由由互联网表示的网络执行通信处理。此外,连接从诸如磁盘(包括软盘)、光盘(包括致密盘只读存储器(cd-rom)、数字通用盘(dvd))、磁光盘(包括微型盘(md))或者半导体存储器的可移动存储介质1011读取数据和将数据写入可移动存储介质1011的驱动器1010。
[0425]
cpu 1001根据存储在rom 1002中的程序或者从安装在存储单元1008中并且从存储单元1008加载到ram 1003的可移除存储介质1011(诸如磁盘、光盘、磁光盘或半导体存储器)读取的程序来执行各种处理。ram 1003还适当地存储cpu 1001执行各种处理所需的数据等。
[0426]
在如上所述配置的计算机中,例如,cpu 1001经由输入-输出接口1005和总线1004将存储在存储单元1008中的程序加载到ram 1003中并且执行程序,从而执行上述一系列处理。
[0427]
例如,由计算机(cpu 1001)执行的程序可以通过记录在作为封装介质等的可移动存储介质1011中来提供。此外,可经由诸如局域网、因特网、或者数字卫星广播等有线或无线传输介质提供程序。
[0428]
在计算机中,通过将可移动存储介质1011安装到驱动器1010,可以经由输入-输出接口1005将程序安装在存储单元1008中。此外,程序可经由有线或无线传输介质由通信单元1009接收并安装在存储单元1008中。此外,程序可以提前安装在rom 1002或存储单元1008中。
[0429]
应注意,由计算机执行的程序可以是用于按照本说明书中描述的顺序按时间序列执行的程序,或用于并行处理或在诸如当进行呼叫时的必要定时处理的程序。
[0430]
要注意的是,在图30中的cpu 1001实现图10中的控制单元101和图25中的控制单元351、381的功能。
[0431]
此外,在本说明书中,系统意味着一组多个部件(装置、模块(部件)等),并且所有部件是否在同一壳体中无关紧要。因此,容纳在分开的壳体中并且经由网络连接的多个装置和其中多个模块容纳在一个壳体中的单个装置都是系统。
[0432]
应注意,本公开的实施方式不限于上述实施方式,并且在不背离本公开的范围的情况下,各种修改是可能的。
[0433]
例如,本公开可以具有云计算的配置,其中,经由网络由多个设备共享一个功能并且协作执行处理。
[0434]
此外,在上述流程图中描述的每个步骤可以由一个装置执行,或者可以由多个装置以共享方式执行。
[0435]
此外,在一个步骤中包括多个处理的情况下,除了由一个装置执行之外,包括在一个步骤中的多个处理还可以由多个装置以共享方式执行。
[0436]
应注意,本公开还可具有以下配置。
[0437]
《1》一种信息处理装置,包括:
[0438]
控制单元,在一个静止姿态中,基于作为由惯性测量单元检测的测量值的静止姿态测量值以及与惯性测量单元的布置相关的信息,来校准惯性测量单元。
[0439]
《2》根据《1》的信息处理装置,其中,
[0440]
控制单元基于静止姿态测量值以及惯性测量单元地球上的的纬度和绝对方向的信息来校准惯性测量单元。
[0441]
《3》根据《2》的信息处理装置,其中,
[0442]
控制单元基于纬度和绝对方向的信息,通过计算静止姿态测量值的角速度中与地球自动旋转相关的分量作为以惯性测量单元为基准的传感器坐标系的自动旋转分量,来校准惯性测量单元。
[0443]
《4》根据《3》的信息处理装置,其中,
[0444]
控制单元通过根据静止姿态测量值中的加速度信息计算重力方向,并基于重力方向和绝对方向计算传感器坐标系的自动旋转分量,来校准惯性测量单元。
[0445]
《5》根据《4》的信息处理装置,其中,
[0446]
控制单元基于重力方向和绝对方向设定用于将全局坐标系中的姿态信息转换成以惯性测量单元为基准的传感器坐标系中的姿态信息的姿态旋转矩阵的逆矩阵,并且通过逆矩阵将基于纬度和绝对方向的信息的全局坐标系的自动旋转分量转换成传感器坐标系的自动旋转分量来校准惯性测量单元。
[0447]
《6》根据《5》的信息处理装置,其中,
[0448]
控制单元通过基于静止姿态测量值和传感器坐标系的自动旋转分量从静止姿态测量值计算传感器坐标系的偏差分量来校准惯性测量单元。
[0449]
《7》根据《6》的信息处理装置,其中,
[0450]
控制单元通过从静止姿态测量值中的角速度的平均值减去传感器坐标系的自动旋转分量来计算传感器坐标系的偏差分量来校准惯性测量单元。
[0451]
《8》根据《7》的信息处理装置,其中,
[0452]
控制单元基于通过校准获得的自动旋转分量和偏差分量校正由惯性测量单元测量的测量值。
[0453]
《9》根据《8》的信息处理装置,其中,
[0454]
控制单元通过从惯性测量单元测量的测量值中减去自动旋转分量和偏差分量来校正测量值。
[0455]
《10》根据《9》的信息处理装置,其中,
[0456]
控制单元基于通过减去自动旋转分量和偏差分量而校正的测量值的角速度来更新姿态旋转矩阵,并且通过更新的姿态旋转矩阵将测量值的加速度转换成全局坐标系的加速度。
[0457]
《11》根据《10》的信息处理装置,其中,
[0458]
惯性测量单元内置在根据用户所期望的形状移动的笔型装置中;并且
[0459]
控制单元基于全局坐标系的加速度获得笔型装置的笔尖的轨迹的位置信息,并且基于轨迹的位置信息在显示装置上显示与轨迹对应的绘制的图像。
[0460]
《12》根据《11》的信息处理装置,进一步包括笔筒,笔筒包括孔,所述孔能够通过将笔型装置沿预定方向插入孔而固定笔型装置,其中,
[0461]
一个静止姿态是笔型装置插入并固定至笔筒的状态下的姿态。
[0462]
《13》根据《12》的信息处理装置,其中,
[0463]
笔型装置的截面形状和笔筒的孔的截面形状在预定方向上彼此匹配;并且
[0464]
一个静止姿态是在笔形装置的截面形状与笔筒的孔的截面形状彼此匹配的状态下插入笔形装置的状态下的姿态。
[0465]
《14》根据《12》或《13》所述的信息处理装置,其中,
[0466]
笔型装置包括发光单元,发光单元的发光由控制单元控制;以及
[0467]
当在笔型装置被插入笔筒的一个静止姿态下通过校准获得自动旋转分量和偏差分量时,控制单元使发光单元发光。
[0468]
《15》根据《14》的信息处理装置,其中,
[0469]
在校准得到自动旋转分量和偏差分量,并使光发光单元发光后,将笔型装置从笔筒中取出,并根据用户期望的形状移动,以基于全局坐标系的加速度得到笔尖轨迹的位置信息时,在从笔型装置从笔筒取出的时刻起已经过去预定时间时,控制单元关断发光单元。
[0470]
《16》根据《15》的信息处理装置,其中,
[0471]
当笔型装置从笔筒取出并且根据用户所期望的形状移动以基于全局坐标系的加速度获得笔的笔尖的轨迹的位置信息时,伴随从笔筒取出笔的时刻起经过的时间,控制单元基于轨迹的位置信息连使对应于显示在显示装置上的轨迹的绘制的图像以逐渐淡的颜色显示。
[0472]
《17》根据《15》的信息处理装置,其中,
[0473]
笔筒包括惯性测量单元,检测笔筒的绝对方位角,并且将绝对方位角提供给笔型装置;并且
[0474]
控制单元获取笔筒的绝对方位角,并基于笔筒的绝对方位角、惯性测量单元地球上的纬度信息和静止姿态测量值校准惯性测量单元。
[0475]
《18》根据《17》的信息处理装置,其中,
[0476]
控制单元获取笔筒与控制单元自身的差方位信息,获取笔筒的绝对方位角,从笔筒的绝对方位角和差方位获得控制单元自身的绝对方位角,并基于控制单元自身的绝对方位角、惯性测量单元地球上的纬度信息和静止姿态测量值校准惯性测量单元。
[0477]
《19》一种信息处理方法,包括:
[0478]
在一个静止姿态中,基于作为由惯性测量单元检测的测量值的静止姿态测量值以及与惯性测量单元的布置相关的信息来校准惯性测量单元。
[0479]
《20》一种用于使计算机起到以下部件的程序:
[0480]
控制单元,在一个静止姿态中,基于作为由惯性测量单元检测的测量值的静止姿态测量值以及与惯性测量单元的布置相关的信息,来校准惯性测量单元。
[0481]
附图标记列表
[0482]
11 笔型绘图系统
[0483]
31、31'、31”、31”'笔
[0484]
32、32'、32”、32”'笔筒
[0485]
32a、32a'、32a”、32a”'孔
[0486]
33 pc
[0487]
34 显示装置
[0488]
51 压敏传感器
[0489]
52 发光单元
[0490]
61 基板
[0491]
62 电池
[0492]
63 多imu(惯性测量单元)
[0493]
63a至63d imu
[0494]
81 液体
[0495]
82、83 o形环
[0496]
84 盖子
[0497]
84 凹部
[0498]
85 外周部分
[0499]
86 内径部分
[0500]
101 控制单元
[0501]
102 获取单元
[0502]
103 通信单元
[0503]
131 惯性导航处理单元
[0504]
132 发光控制单元
[0505]
133 压敏传感器处理单元
[0506]
134 外部i/f
[0507]
141 控制ic
[0508]
142 led
[0509]
151 位置姿态处理单元
[0510]
152 初始姿态估计单元
[0511]
153 静止确定单元
[0512]
171 姿态估计单元
[0513]
172 自动旋转估计单元
[0514]
173 加速度积分单元
[0515]
181 初始重力估计单元
[0516]
182 偏差估计单元
[0517]
201 笔筒
[0518]
211 切换开关
[0519]
212 发光单元
[0520]
212a至212c led
[0521]
301、301' 发光单元
[0522]
331 笔
[0523]
331a 压敏传感器
[0524]
351 控制单元
[0525]
352 获取单元
[0526]
353 通信单元
[0527]
354 多imu
[0528]
355 发光单元
[0529]
356 压敏传感器
[0530]
381 控制单元
[0531]
382 通信单元
[0532]
383 多imu
[0533]
411 位置姿态估计单元
[0534]
412 初始姿态估计单元
[0535]
413 静止确定单元
[0536]
431 姿态估计单元
[0537]
432 加速度积分单元
[0538]
451 初始重力估计单元
[0539]
452 绝对方位角偏差估计单元。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1