容器夹持器的制作方法
容器夹持器
1.相关申请
2.本技术要求2020年1月20日提交的英国申请号2000798.5根据35u.s.c.
§
119或365的优先权。通过援引将以上申请的全部传授内容并入本文。
背景技术:
3.储存冷冻机提供了绝热和受控环境来容纳许多生物样品或其他样品。在典型的储存冷冻机中,将样品装载到架子或托盘中,每个架子或托盘都保持若干样品。从冷冻机的受控环境中手动取出架子或托盘,将该架子或托盘呈现给使用者,以便从储存冷冻机取出样品或者向储存冷冻机添加样品。根据储存样品的储存要求,储存冷冻机将受控环境保持在适当的温度,以便长时间保存样品。
技术实现要素:
4.示例性实施例包括用于夹持容器(比如管、小瓶、罐、盒、板、架子或其他容器)或容器的一部分的设备。该设备可以包括具有中心轴线的支撑结构、马达和夹持器台。夹持器台可以包括多个叶片,多个叶片中的每一个叶片具有:a)第一端,叶片旋转轴线延伸穿过该第一端,叶片旋转轴线相对于支撑结构固定并且偏离中心轴线;b)第二端,该第二端可周向和径向移动以使叶片围绕叶片旋转轴线旋转;以及c)中心部分。夹持器台还可以包括环形结构,该环形结构联接到马达以使环形结构围绕中心轴线旋转。当环形结构旋转时,环形结构可以移动每个叶片的第二端以使叶片围绕叶片的叶片旋转轴线旋转,从而将中心部分朝向中心轴线移位,以接触沿着中心轴线延伸的容器外部部分。
5.该夹持器台可以是第一夹持器台,并且该设备可以进一步包括第二夹持器台。第二夹持器台可以包括多个叶片,该多个叶片中的每一个叶片具有:a)第一端,叶片旋转轴线延伸穿过该第一端;b)第二端,该第二端可由环形结构移动以使叶片围绕叶片旋转轴线旋转;以及c)中心部分。环形结构可以包括配置成移动第一夹持器台和第二夹持器台的多个叶片的共用环。
6.夹持器台可以进一步包括多个旋转销,多个旋转销中的每一个旋转销沿着相应的叶片旋转轴线联接到支撑结构和相应的叶片的第一端,叶片围绕旋转销旋转。
7.多个叶片中的每一个叶片的第二端可以连接到相应的驱动销,相应的驱动销由环形结构接合,以移动叶片的第二端,从而使叶片围绕叶片旋转轴线旋转。每个驱动销可以被定位成在环旋转时在环内的径向槽内滑动。每个驱动销的相反端可以被定位成在环旋转时在支撑结构的弯曲槽内移动。每个驱动销被定位成在环旋转时在环内的径向槽内滑动。
8.多个叶片可以是三个叶片,并且叶片中的每一个叶片可以背离中心轴线弯曲。在环形结构旋转之前的第一位置,多个叶片可以符合环形结构的内边缘,以及在环形结构旋转之后的第二位置,多个叶片中的每一个叶片的中心部分可以接触容器的外边缘。多个叶片中的每一个叶片的中心部分可以包括定位成接触容器的垫或结构。多个叶片可以适于夹持具有不同直径的容器。设备还可以包括控制器,该控制器被配置成致动马达以控制环形
结构的旋转。
9.控制器可以被配置成致动马达以控制环形结构的旋转。控制器可以基于管的直径来使环形结构旋转一定距离,该距离对应于多个叶片与管相接触。传感器可以被配置成检测管的位置和大小中的至少一者,并且控制器可以被配置成基于传感器的输出来使环形结构旋转一定距离。传感器包括在马达处的力反馈传感器。
10.拣选机器人可以联接到设备并且可以被配置成在容器所处的储存位置与容器将被运输到的目的地之间平移设备。装载装置可以被配置成1)将装载销定位在储存位置处的容器下方,以及2)向上驱动装载销以朝向多个叶片提升容器。
11.进一步的实施例可以包括容器取回系统。系统可以包括被配置成夹持容器的夹持器。夹持器可以包括具有中心轴线的支撑结构、马达和夹持器台。夹持器台可以包括多个叶片,多个叶片中的每一个叶片具有:a)第一端,叶片旋转轴线延伸穿过该第一端,叶片旋转轴线相对于支撑结构固定并且偏离中心轴线;b)第二端,该第二端可周向和径向移动以使叶片围绕叶片旋转轴线旋转;以及c)中心部分。夹持器台还可以包括环形结构,该环形结构联接到马达以使环形结构围绕中心轴线旋转。当环形结构旋转时,环形结构可以移动每个叶片的第二端以使叶片围绕叶片的叶片旋转轴线旋转,从而将中心部分朝向中心轴线移位,以接触沿着中心轴线延伸的容器外部部分。系统可以进一步包括拣选机器人,该拣选机器人被配置成在容器所处的储存位置与容器将被运输到的目的地之间平移夹持器。装载装置可以被配置成1)将装载销定位在储存位置处的容器下方,以及2)向上驱动装载销以朝向多个叶片提升容器。
附图说明
12.根据示例性实施例的以下更具体的说明,上述内容将是明显的,如在这些附图中展示的,其中,在所有不同的视图中,相同的附图标记指代相同的部分。这些图不一定是按比例绘出,而是着重展示实施例。
13.图1a至图1b展示了现有技术中夹持器的操作。
14.图2a至图2b展示了将夹持器应用于不同大小的容器。
15.图3展示了一个实施例中的容器取回系统。
16.图4a至图4d展示了一个实施例中的夹持器。
17.图5a至图5b展示了一个实施例中的一组夹持器叶片。
18.图6a至图6b展示了另一实施例中的一组夹持器叶片。
19.图7a至图7c展示了一个实施例中的夹持小容器的夹持器。
20.图8a至图8c展示了一个实施例中的夹持大容器的夹持器。
21.图9a至图9c展示了一个实施例中的夹持锥形容器的夹持器。
22.图10a至图10c展示了另一实施例中的夹持器。
23.图11是可以实施实施例的自动化储存系统的框图。
具体实施方式
24.示例性实施例的描述如下。所有专利、公开的申请以及本文引用的参考文献的传授内容都通过援引方式以其全文并入。
25.图1a至图1b展示了传统取回系统中夹持器的操作。实验室器皿108包括有条理地放置在架子(未示出)中的多个样品管或其他容器。实验室器皿108可以储存在受控环境中,以保存包含在其中的样品。为了从实验室器皿108取出选定容器110,可以将实验室器皿108从其储存环境中取出并且放入工作区域中。这里,装载销102可以定位在实验室器皿下方,并且夹持器105可以定位在实验室器皿108上方。如图1a所示,装载销102向上移动以向上驱动选定容器110,使得容器110的顶部部分暴露在实验室器皿108的其余部分上方。如图1b所示,夹持器105然后闭合其手指以抓住容器110的顶部部分,提起容器110并将其从实验室器皿108的其余部分取出。在2019年3月15日提交的美国专利申请号为16/354,993中描述了一种示例性受控储存与取回系统,包括夹持器组件,其全部内容通过援引并入本文。
26.图2a至图2b是展示在现有技术中将夹持器应用于不同大小的容器的俯视图。如图2a所示,直径为d1的容器210a被具有三个夹持手指205a的夹持器夹持。在打开位置,夹持器被定位成使得夹持手指205a位于容器210a周围。在闭合位置,夹持手指205a中的每一个夹持手指朝向容器210a移动,从而接触容器210a的表面以保持对容器210a的夹持。
27.如图2b所示,直径为d2的较大容器210b被具有三个夹持手指205b的夹持器夹持。如同在图2a的夹持器中,夹持手指205b在打开位置位于容器210b周围,并且在闭合位置朝向容器210b移动以夹持容器210b,从而接触容器210b的表面以保持对容器210b的夹持。
28.如容器210a-b所示,有各种各样的圆柱形和其他实验室器皿可能需要由自动夹持器操纵。这种实验室器皿可以被有条理地放置在架子中,并且储存在受控环境中,其中自动夹持器可以在架子之间或者在储存环境与输入/输出端口之间定位和移动单个容器。不同类型的实验室器皿之间可能存在许多差异,包括不同直径、形状和表面特征的管和小瓶。大直径的差异是限制使用相同夹持器操纵一系列实验室器皿的能力的一个因素。传统夹持器通常具有由其行程限定的范围限制,但是夹持手指的形式也可能是限制因素。例如,夹持小物体所需的手指针对较大的物体提供小的接触部分,这对于牢固地夹持那些较大的物体可能存在问题。此外,当完全打开时,手指细的夹持器可能让物体从它们之间的空隙落下。手指的大小可能由最小夹持范围(零行程位置)限制,结果,夹持器往往对其实际夹持范围有限制。因此,传统夹持器通常不能够一致地并且有效地夹持直径较大和直径较小的实验室器皿。
29.传统夹持器的另一挑战是,实验室器皿在离开支撑架子时可能会倾斜。相应地,对于夹持器来说,在夹持容器之前抓持容器是有利的。为此,夹持器可以被配置成使得打开位置接近容器的直径。然而,由于上述手指大小和夹持范围的限制,传统夹持器可能不能够抓持大小差异很大的容器。
30.许多传统夹持器还依赖于滑动接触部件,这些部件需要精确加工或使用专有的线性导轨。传统夹持器可能还需要将旋转驱动转换成直线运动的装置,比如齿轮齿条传动装置。传统夹持器还在行程与物理大小之具有直接关系,使得它们在一些应用中空间效率低。
31.图3展示了在示例性实施例中包括夹持器305的容器取回系统300。夹持器301可以安装到拣选机器人350上,该拣选机器人被配置成在架子395内或在架子395与另一储存单元(比如第二架子(未示出))之间定位、抓住和移动样品容器。拣选机器人350可以联接到轨道392,并且被配置成沿着轨道392横向(x方向)移动。拣选机器人350还可以包括驱动机构,比如上轴机构352,用于垂直于轨道392(y方向)和竖直地(z方向)移动夹持器301。这样,拣
选机器人350可以根据需要在三维方向上移动夹持器301,以抓住和移动样品容器。同样地,位于架子395下方的装载装置390可以联接到轨道391,并且可以包括用于在三维方向上移动装载销302的驱动机构。装载销302可以从装载装置390的顶部竖直延伸,并且可以被装载装置驱动穿过架子395以将容器竖直地并且部分地提升出架子395。
32.如图3所示,夹持器301正在夹持已经从架子395取出的选定容器310。为了从架子395取出选定容器310,拣选机器人350可以首先将夹持器301定位在位于架子395中的选定容器上方。为了准确地定位夹持器301以及可选地装载销302,拣选机器人350可以采用对准传感器382,该对准传感器可以利用激光、红外线、视频或其他传感器来确定夹持器301相对于架子395的位置。同时,装载装置390可以将装载销302定位在选定容器310正下方。装载装置390然后可以向上驱动装载销穿过架子395,从而接触选定容器310并且向上驱动选定容器310,直到容器310的至少顶部部分暴露在架子395上方。同时,夹持器301可以抓持夹持器301的腔内的容器310。当容器310的足够部分定位在夹持器301内时,夹持器可以接合以牢固地夹持容器310。一旦容器310被固定,装载装置390然后可以缩回装载销302,将其返回到架子395下方的位置。
33.在将容器310固定在夹持器301中之后,拣选机器人350可以将容器310放置到目的地,该目的地可以是架子395的不同槽或不同架子或储存单元(未示出)。为此,夹持器301和可选地装载装置390可以首先重新定位到目的地。夹持器301然后可以脱离接合以释放容器310,从而将容器降低到目的地。为了帮助释放容器310,卸载销机构354可以降低卸载销(未示出)以接触容器310的顶部并且向下驱动容器310。可以在装载装置390的帮助下以受控方式降低容器310,当容器降低到目的地时,该装载装置可以支撑容器310的底部。
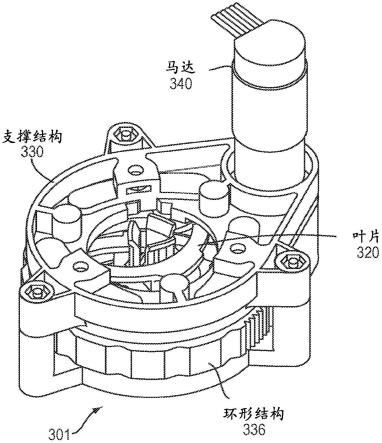
34.图4a至图4b进一步详细展示了夹持器301。如图所示,马达340安装到支撑结构330,该支撑结构包括环形结构336。一组叶片320位于支撑结构330内。马达340可以包括具有用于检测移动和速度的传感器的伺服马达,并且可以驱动环形结构336相对于支撑结构330旋转。通过这种旋转,环形结构336可以朝向或背离支撑结构336的竖直中心轴线移动叶片320。这样,叶片320可以夹持放置在支撑结构内的容器或其他物体。马达340和/或与马达340连接的传动装置(未示出)可以被配置成使得由叶片320施加在容器上的接触压力能够被改变。可以基于容器的已知特性来选择接触压力。例如,对于具有易碎表面的容器,接触压力可以设定得较低,而对于更坚固、更重的容器或外表面具有顺应性材料的容器,接触压力可以设定得较高。控制马达340和/或传动装置的控制器(如下所述)可以相应地选择接触压力,并且马达340可以通过改变其输出转矩或马达速度来响应。
35.图4c是夹持器301的分解图。支撑结构330包括上壳体330a和下壳体330b,上壳体和下壳体通过拧入相应螺母347的一组螺钉346连结。马达340可以安装到上壳体330a的顶部表面,并且可以通过驱动轴341连接到小齿轮342。驱动轴341可以包括刚性驱动构件(例如实心金属轴)或柔性驱动构件(例如柔性线缆驱动器)。在一些实施例中,马达340位于远离小齿轮342的位置,例如,在环境温度与夹持器301附近的环境温度不同(例如,更热)的位置。这种构造可以使得马达340能够保持在-20℃或以上的温度,而夹持器的其余部分可以在例如-80℃的环境中操作。环形结构336可以包括主凸轮336a和副凸轮336b。如图所示,主凸轮336a可以在外表面处包括齿轮齿,并且齿可以与小齿轮342啮合,使得马达340能够驱动主凸轮336a相对于支撑结构330旋转。副凸轮336b可以固定到主凸轮336a,以与主凸轮
336a同步旋转。
36.叶片320可以包括上叶片组320a和下叶片组320b。上叶片组320a可以定位在上壳体330a与主凸轮336a之间,而下叶片组320b可以定位在副凸轮336b与下壳体330b之间。上叶片组320a和下叶片组320b可以各自包括多个叶片,并且叶片中的每一个叶片可以具有第一端和第二端。第一端可以连接到相应的枢轴销(例如,枢轴销343),其中枢轴销可以部分或完全延伸穿过第一端的孔。替代性地,枢轴销可以与叶片成一体,从每个叶片的第一端延伸。枢轴销可以通过上壳体330a和/或下壳体330b可旋转地固定在一端或两端。因此,叶片320a-b的第一端可以相对于支撑结构330固定。叶片320a-b的第二端可以连接到相应的驱动销(例如,驱动销344),其中驱动销可以部分或完全延伸穿过第二端的孔。替代性地,驱动销可以与叶片成一体,从每个叶片的第二端延伸。驱动销可以延伸入或延伸穿过主凸轮336a和/或副凸轮336b的孔,使得驱动销与主凸轮和副凸轮336a-b一起移动。因此,叶片320a-b的第二端可以被主凸轮和副凸轮336a-b移动。如下面进一步详细描述的,此移动使得叶片320a-b将叶片320a-b的中心部分朝向支撑结构330a-b的中心轴线移动,从而接触并且夹持位于夹持器301内的容器。
37.叶片320a-b的中心部分可以包括垫或加宽表面,如图所示,以增加与容器的接触面积。在此移动期间,一个或多个弹簧(例如,位于主凸轮和/或副凸轮336a-b处的弹簧337)可以向一个或多个叶片320a-b和/或销343、344施加力,从而帮助一个或多个叶片320a-b移动。例如,弹簧可以在下叶片组320b处实施,以帮助夹持具有较大上直径和较小下直径的锥形容器。在这种应用中,弹簧可以使下叶片组320b比上叶片组320a更进一步朝向中心轴线推进,从而使得下叶片组320b夹持锥形容器的较小直径,而上叶片组320a夹持锥形容器的较大直径。因为在这种构造下弹簧为夹持提供弹性,所以下叶片组320b可以用于稳定锥形容器,而上叶片组320a可以用于牢固地夹持和移动容器。替代性地,可以实施线形式或其他机械元件来在夹持容器时推进上叶片组和/或下叶片组320a-b。下面会参照图9a至图9c进一步详细地描述夹持锥形容器的示例性操作。
38.图4d是关注叶片320a-b和连接部件的夹持器301的分解图。为了清楚起见,示出了主凸轮336a,但是省略了副凸轮336b。上叶片组和下叶片组320a-b各自包括三个叶片。为了说明的目的,参考了下叶片组320a的单个叶片322。叶片322具有第一端323a和第二端323b。当组装时,枢轴销343延伸穿过第一端323a,驱动销344延伸穿过第二端343b。枢轴销343也可以以固定或以其他方式连接到上壳体和/或下壳体330a-b。如图所示,主凸轮336a可以包括沿着其内边缘的切口或其他形状,以使得主凸轮336a能够移动而不会与枢轴销343碰撞。相比之下,驱动销344可以延伸穿过主凸轮336a中的径向槽339。当叶片320a-b被主凸轮336a移动时,径向槽339可以允许叶片扫过。可选地,叶片322的中心部分可以通过连接销连接到上叶片组320a的叶片。
39.因此,夹持器301可以包括具有多个叶片320a-b的夹持器台和包括主凸轮336a和可选地副凸轮336b的环形结构336。多个叶片320a-b中的每一个叶片可以具有第一端(例如,第一端323a),叶片旋转轴线延伸穿过该第一端,其中叶片旋转轴线可以相对于支撑结构(例如,通过枢轴销343)固定并且偏离支撑结构330的中心轴线331。多个叶片320a-b中的每一个叶片可以进一步具有第二端(例如,第二端323b),该第二端可周向和径向移动(例如,通过驱动销344)以使叶片322围绕叶片旋转轴线旋转。主凸轮336a可以联接到马达340
以使主凸轮336a围绕中心轴线331旋转。当旋转时,主凸轮336a可以移动每个叶片322的第二端323b以使叶片322围绕叶片322的叶片旋转轴线旋转,从而使叶片322的中心部分朝向中心轴线331移位,以接触沿着中心轴线331延伸的容器外部部分(未示出)。通过在两端支撑叶片320a-b(例如,通过支撑第一端的支撑结构330和支撑第二端的环形结构336),夹持器301可以提高叶片320a-b的刚度和可以施加到容器的夹持力。
40.如图所示,每个叶片320a-b形成具有方形边缘的弧形,并且包括在与容器接触的内边缘处具有较宽表面的中心部分。中心部分还可以向外张开以容纳不同形状的容器。在进一步的实施例中,叶片320a-b可以形成一系列其他形状。例如,叶片320a-b可以包括一个或多个直线段而不是弧形,并且可以具有圆滑形或钝化的边缘。进一步地,中心部分可以包括带垫的表面或适于接触容器的其他特征。叶片320a-b可以根据期望的应用由一系列材料构成,比如金属(例如不锈钢)、陶瓷、塑料或复合材料,并且此材料可以不同于构成支撑结构330或环形结构336的材料。例如,在需要频繁的容器夹持循环的应用中,为了可靠性、精确性和耐用性,可能期望刚性的、基本上不顺应的叶片(例如,金属或陶瓷)。在其他应用中,更顺应的(例如塑料)叶片和/或接触垫可能是期望的,比如当夹持具有易碎表面的容器时。进一步地,叶片320a-b可以由多种不同的材料形成。例如,叶片的中心部分或中心部分的夹持表面可以由比叶片320a-b的端部更顺应的材料构成,或可以包括一层适于接触容器的垫材料。叶片320a-b或叶片的一部分(例如,中心部分处的接触垫)也可以在夹持器301内更换。
41.图5a至图5b提供了夹持器301的仰视图,展示了当主凸轮336a旋转时下叶片组320b的移动。在此视图中位于下叶片组320b后面的上叶片组320a可以与下叶片组320b同步移动。图5a展示了处于“打开”位置的夹持器301,而图5b展示了处于“闭合”位置的夹持器。在图5a的打开位置,下叶片组320b的内边缘重叠以形成包括夹持器301内的腔的环形。特别地,叶片322占据环形的左上部分,并且由穿过第一端323a的枢轴销343和穿过第二端323b的驱动销344保持就位。容器310沿着中心轴线331定位,因此被叶片320a-b围绕。
42.当马达340(图4a至图4c)致动小齿轮342时,主凸轮336a围绕中心轴线331旋转。此旋转还通过驱动销(例如,驱动销344)而使叶片320a-b的第二端(例如,第二端323b)围绕中心轴线331移动。因为叶片320a-b的第一端可以相对于支撑结构330保持静止,所以叶片320a-b移动使得叶片的中心部分朝向中心轴线331移动。此移动可以继续,直到如图5b所示,叶片320a-b的中心部分与容器310相遇,从而在闭合位置夹持容器310。在夹持容器310之前,如果容器远离中心轴线331或如果容器背离中心轴线331倾斜,叶片320a-b可以“抓持”容器310。因此,叶片320a-b可以捕获容器310,而不管容器在夹持器301的腔内的位置或取向,并且当叶片闭合在容器310上时,可以重新定位和重新定向容器310,从而确保对容器310的牢固和一致夹持。
43.图6a至图6b提供了另一实施例中的支撑结构630和环形结构636的仰视图。结构630、636可以结合到上述301的夹持器301中,并且同样可以结合上述支撑结构330和环形结构336的一个或多个特征。除了前述特征之外,支撑结构630可以包括多个弯曲槽,该多个弯曲槽包括槽633,当驱动销(例如,驱动销644)被环形结构636移动时,该槽可以引导驱动销的移动或使得驱动销能够移动。特别地,叶片组620包括三个叶片,其中一个叶片(叶片622)由第一端623a处的枢轴销643和第二端623b处的驱动销644保持。当叶片622从图6a的打开
位置移动到图6b的闭合位置时,驱动销644沿着槽633顺时针移动第二端623b。因此,支撑结构630的槽633可以在叶片闭合以夹持容器时引导叶片622的移动。
44.图7a至图7c展示了夹持小容器311a的夹持器301。图7a至图7b示出了立体图,而图7c示出了夹持器301的截面侧视图。处于闭合位置的叶片320a-b围绕并且牢固地夹持容器311a。如图7c所示,上叶片组320a夹持容器311a的顶部部分,并且下叶片组320b夹持容器311a的下部部分。容器311a的底部部分可以从夹持器301的底部部分延伸,这可以通过在夹持器301释放容器311a之前进入架子或其他储存单元的槽来帮助将容器311a放置在其目的地。
45.图8a至图8c展示了夹持大容器311b的夹持器301。图8a至图8b示出了立体图,而图8c示出了夹持器301的截面侧视图。与图7a至图7c所示的操作相比,叶片320a-b被定位成接近全开位置,以便容纳容器311b的较大直径。仍然类似地,叶片320a-b围绕并且牢固地夹持容器311b。如图7c所示,上叶片组320a夹持容器311b的顶部部分,并且下叶片组320b夹持容器311b的下部部分。
46.图9a至图9c展示了夹持锥形容器311c的夹持器301。图9a至图9b示出了立体图,而图9c示出了夹持器301的截面侧视图。与容器311a-b相比,容器311c具有锥形形状,具有不同的顶部直径和底部直径。如图7c所示,为了夹持此容器311c,上叶片组320a可以在较宽的位置夹持容器311c的顶部部分,并且下叶片组320b可以在较窄的位置夹持容器311c的下部部分。为了实现上叶片组320a与下叶片组320b之间的不同位置,叶片320a-b可以不连接(例如,省略上述连接销345)并且被配置成彼此独立地打开和闭合。结果,叶片320a-b围绕并且牢固地夹持容器311c。
47.图10a至图10c展示了另一实施例中的夹持器303。夹持器303可以结合上述夹持器301的一个或多个特征。特别地,夹持器303可以包括安装在支撑结构380上的马达386,支撑结构包括环形结构388。一组叶片384位于支撑结构380内。马达386可以包括具有用于检测移动和速度的传感器的伺服马达,并且可以驱动环形结构388相对于支撑结构380旋转。通过这种旋转,环形结构388可以朝向或背离支撑结构380的竖直中心轴线移动叶片384。这样,叶片384可以夹持放置在支撑结构内的容器或其他物体。
48.一些或所有叶片384可以在叶片384的中心部分限定切口385。如图10c的侧视图所示,切口385可以沿着适于接触容器的部分占据叶片384的顶侧和/或底侧。切口385可以减小叶片384在接触容器的表面处的有效螺距,确保叶片384在切口385之间的中心表面处与容器接触。这种构造可以帮助形成对锥形容器(比如上述容器311c)的牢固夹持。
49.图11是自动化储存系统1000的框图,其中可以实施夹持器301和容器取回系统300或其他自动系统。系统1000可以包括:外壳(例如,冷冻机1030),该外壳被配置成将多个样品容器保持在受控环境(例如,低于用于储存样品容器的阈值温度,比如低温温度)中;以及自动化系统1020,该自动化系统被配置成例如通过从外壳取回容器、将容器返回外壳、和/或在架子或其他储存单元内或之间重新配置容器来处理样品容器。自动化系统1020可以包括上述容器取回系统300,该容器取回系统进而可以包括夹持器301。通过如上所述选择部件材料和放置和/或其他修改,夹持器301可以被配置成在关于温度和湿度的各种环境中操作。例如,夹持器301可以被配置成在室温下操作,或可以被配置成在冷冻机1030内操作,因为冷冻机保持环境在等于或低于0℃、等于或低于-20℃、等于或低于-80℃、或等于或接近
低温(在-150℃与-273℃之间)。
50.控制器1080可以连通性地联接到自动化系统1020和冷冻机1030,并且通常控制其各自的一些或全部操作。例如,控制器1080可以监测和调节冷冻机1030内的温度、湿度和其他条件。控制器1080还可以控制自动化系统1020,以管理和控制样品进入或离开冷冻机1030的转移。控制器1080还可以控制其他操作,比如机械部件的校准、识别样品、以及故障或灾难恢复。进一步地,控制器可以维护数据库1090,该数据库存储关于储存在冷冻机1030内的样品的信息,包括每个样品(即,架子和样品盒)在冷冻机1030内的位置。控制器1080可以响应于样品进入或离开冷冻机1030的转移而更新数据库1090。
51.控制器1080还可以控制包括夹持器301的容器取回系统300的操作。参照图4a至图4c,控制器1080可以引导夹持器301的移动,包括叶片320a-b的操作。为了控制叶片320a-b以确保正确地夹持容器而不损坏容器,控制器1080可以在移动范围内操作叶片320a-b,并且基于来自马达340和/或使用者的反馈来配置叶片320a-b的位置。例如,控制器1080可以基于叶片320a-b的打开端行程建立打开位置,当马达在行程的极限停止时监测马达电流。为了确定叶片320a-b在夹持给定容器时适当的闭合位置,使用者可以手动地将夹持器爪移动到正确的位置,并且控制器1080可以基于从打开位置开始的马达转数来建立此位置。完全闭合的位置也可以以这种方式建立。因此,用于夹持给定容器的叶片320a-b和/或马达340的适当配置和/或位置可以由控制器1080确定,并且这种配置可以存储到数据库1090。对于使用一系列不同容器类型的应用,比如上述容器311a-c,针对每种容器类型的配置可以存储到数据库1090。于是,在夹持给定容器之前,控制器可以识别容器类型(例如,基于容器上的预定信息,或通过传感器或其他装置检测容器类型),从数据库1090中检索对应的配置,并且控制夹持器根据该配置夹持容器。
52.控制器1080可以实施以下过程:基于上述值确定应该在哪里找到容器,并且可以指示马达340在夹持容器时实现正确的位置。为了牢固地夹持容器,控制器1080可以确定小于容器的夹持位置。控制器1080还可以设定“窗口”来评估马达340的最终位置。当叶片320a-b闭合在容器上时,控制器1080可以预期来自马达340的信号,该信号指示在此位置窗口中的某处停止。假设接收到此信号,控制器1080可以确定容器被牢固地夹持并且移动完成。在替代性实施例中,容器取回系统300可以实施一个或多个传感器1040(例如,来自马达340、距离传感器、照相机的反馈)来确定容器和叶片320a-b的位置,并且控制器1080可以实施那些传感器1040的输出来控制夹持器301,而无需容器的预定配置。
53.为了提供上述控制操作,控制器1080可以包括适合的计算机硬件和软件资源,比如一个或多个计算机工作站和被配置用于与自动化系统1020和冷冻机1030进行通信的接口。控制器1080的部件可以在包括容器取回系统300的自动化系统1020处实施以及远离自动化系统1020实施。控制器1080还可以包括允许使用者监测系统1000并且监测和启动系统1000的上述操作的接口(例如,工作站)。
54.虽然已经具体示出和描述了示例性实施例,但是本领域技术人员将理解,可以在不背离由所附权利要求涵盖的实施例的范围的情况下在其中做出在形式和细节方面的各种改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1