估计装置和估计方法与流程
1.本发明涉及估计装置和估计方法,尤其涉及估计发动机的带装置的寿命的技术。
背景技术:
2.通常,这种带装置在曲轴上设置有驱动带轮,并且在交流发电机或散热器风扇等辅助设备上设置有从动带轮,这种带装置是通过将环形带(以下简称为带)卷绕在驱动带轮和从动带轮上而构成的。
3.这样的带由于在使用一定时间之后因劣化等而伸长,因而基于搭载带装置的车辆的行驶距离等来进行更换。例如,在专利文献1中公开了如下技术:在可一体旋转地固定带轮的旋转轴上设置应变仪,基于由该应变仪检测到的扭矩来判别带的更换时期。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2005-344807号公报
技术实现要素:
7.发明所要解决的技术问题
8.如上述文献1所记载的技术那样,为了使用应变仪来检测带的劣化,需要将应变仪贴附到旋转轴上,或者将应变仪与用于放大应变仪输出的放大器连接等,装置的结构变得复杂。因此,期望装置的进一步简化。
9.本发明的技术是鉴于上述情况而完成的,其目的在于以简单的结构有效地估计带的寿命。
10.用于解决问题的手段
11.本发明的估计装置包括:距离获取装置,具有检测部,所述检测部获取具有卷绕带的带轮的带装置中的、在所述带轮的轴向上距所述带轮的相对距离;位移量运算装置,基于所获取的所述相对距离,运算所述带轮的轴向上的位移量;以及带寿命估计装置,基于所运算的所述位移量,估计所述带的寿命。
12.此外,还包括存储装置,所述存储装置存储规定了所述带轮的位移量和所述带的伸长量之间的关系的映射,所述带寿命估计装置也可以通过基于所运算的所述位移量参照所述映射来求出所述带的伸长量,并基于该伸长量估计所述带的寿命。
13.此外,所述检测部也可以获取距与所述带接触的所述带轮的外周侧的周向中央的部位的所述带轮的轴向上的相对距离。所述检测部也可以设置在所述带轮中与所述带接触的区域的长度方向上的中央位置的、在所述带轮的轴向上远离所述带轮的位置处。
14.此外,所述带装置包括多个所述带轮,所述检测部也可以获取距所述多个带轮中旋转轴的弯曲刚性最小的带轮的轴向的相对距离。
15.本发明的方法的特征在于,包括由计算机执行的以下步骤:获取具有卷绕带的带轮的带装置中的、在所述带轮的轴向上距所述带轮的相对距离;基于所获取的所述相对距
离运算所述带轮的轴向上的位移量;以及基于所运算的所述位移量估计所述带的寿命。
16.发明的效果
17.根据本发明的技术,能够以简单的结构有效地估计带的寿命。
附图说明
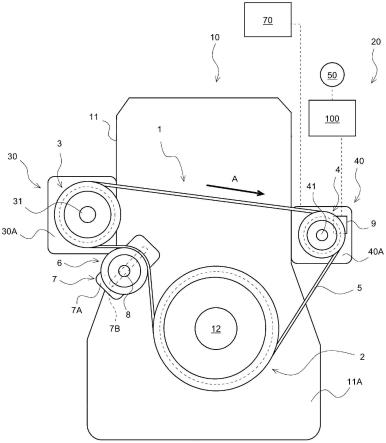
18.图1是示出本实施方式的内燃机的示意性主视图。
19.图2中的(a)是示出本实施方式的位移传感器的配置的示意性主视图,图2中的(b)是示出本实施方式的位移传感器的配置的示意性侧视图。
20.图3是示出本实施方式的控制装置和关联的周边结构的示意性功能框图。
21.图4是示意性示出本实施方式的位移传感器的检测值的图。
22.图5是示出本实施方式的从动带轮的倾斜的示意图。
23.图6是说明由本实施方式的控制装置进行的错位检测的流程的流程图。
24.图7是说明由本实施方式的控制装置进行的带寿命估计的流程的流程图。
具体实施方式
25.以下,基于附图说明本实施方式的估计装置。对相同的部件标注相同的附图标记,并且它们的名称和功能也相同。因此,不再重复对于它们的详细说明。
26.[整体结构]
[0027]
图1是从曲轴方向观察本实施方式的内燃机的示意性主视图。在以下的说明中,在图1中将纸面的近前方向称为前侧,并将纸面的进深方向称为后侧。另外,箭头a表示带的旋转方向。
[0028]
作为内燃机的发动机10包括主要由气缸体、气缸盖、曲轴箱和油盘等构成的发动机主体部11。在发动机主体部11上,输出从未图示的活塞经由连杆等传递的旋转力的曲轴12可旋转地支撑在轴上。
[0029]
[带装置]
[0030]
带装置1包括驱动带轮2、从动带轮3和4、张紧带轮6、保持张紧带轮6的保持部7、驱动带轮2、以及带5。带5卷绕在从动带轮3和4以及张紧带轮6上。带5例如是多楔带,并且在内周面部形成有多个未图示的v字型槽。驱动带轮2以及从动带轮3和4例如是多楔带轮,并且在外周面部形成有多个与带5的内周面部的槽对应的槽。另外,从动带轮3和4以及张紧带轮6的数量不限于图示例,可以采用适当的数量。
[0031]
驱动带轮2以能够与曲轴12一体旋转的方式固定在从发动机主体部11的前侧端面11a向前侧突出的曲轴12的前侧端部上。
[0032]
从动带轮3是空调用压缩机30的带轮,并且以能够与旋转轴31一体旋转的方式固定在从空调用压缩机30的前侧端面30a向前侧突出的旋转轴31的前侧端部上。从动带轮3包括未图示的电磁离合器,并且在电磁离合器接合时,利用发动机10的动力进行旋转驱动。
[0033]
从动带轮4是交流发电机40的带轮,并且以能够与旋转轴41一体旋转的方式固定在从交流发电机40的前侧端面40a向前侧突出的旋转轴41的前侧端部上。交流发电机40利用发动机10的动力来发电。由交流发电机40产生的电力存储在电连接的电池70中。
[0034]
张紧带轮6是供未形成有槽的带5的外周面卷绕的背面平带轮,并且以能够与旋转
轴8一体旋转的方式固定在从保持部7的前侧端面7a向前侧突出的旋转轴8的前侧端部上。张紧带轮6设置成在与带5的外周面接触的同时,能够在预定的带5的外周侧的第一位置和比第一位置更靠带5的内周侧的第二位置之间往复移动。
[0035]
保持部7通过使旋转轴8沿引导槽7b移动,将张紧带轮6保持在第一位置和第二位置之间的预定位置处。通过利用保持部7将张紧带轮6保持在预定位置处,可以适当地调整带5的张力。
[0036]
[估计装置]
[0037]
估计装置20包括位移传感器9和控制装置100。
[0038]
以下,参照图2中的(a)对位移传感器9的具体配置进行详细说明。
[0039]
将从动带轮4的外周和驱动带轮2的外周连接的切线方向的带张力(以下称为第一张力fa)作用于从动带轮4。此外,将从动带轮4的外周和从动带轮3的外周连接的切线方向的带张力(以下称为第二张力fb)作用于从动带轮4。即,第一张力fa和第二张力fb的矢量和即合力fa+fb通过带5作用于从动带轮4。
[0040]
在本实施方式中,位移传感器9设置在从动带轮4的径向外侧的周向大致中央的后方(发动机10侧)。从动带轮4的径向外侧的周向大致中央的后方与和带5接触的从动带轮4的外周侧的周向大致中央的背面侧(发动机10侧)、即作用于从动带轮4的合力fa+fb的矢量方向一致。换句话说,位移传感器9设置在从动带轮4中与带5接触的区域的中央位置处在从动带轮4的轴向上远离从动带轮4的位置处。由此,位移传感器9能够在从动带轮4的倾斜最大的位置处有效地检测从动带轮4的轴向(即,从动带轮4的旋转轴的方向)上的位移量。从动带轮4的位移量例如是从动带轮4的预定位置(例如,与带5接触的区域的中央位置)的轴向上的位置的位移量。
[0041]
位移传感器9(本发明的距离获取装置的一例)例如是光学传感器,如图2中的(b)所示,设置在从动带轮4的背面侧的、交流发电机40的前侧端面40a上,位移传感器9包括检测部9a,该检测部9a包括投光部和受光部。投光部与从动带轮4的旋转轴41的轴心y大致平行地朝向从动带轮4的背面侧射出激光。受光部接收由投光部射出并由检测对象反射的反射光。位移传感器9检测从动带轮4和检测部9a之间的轴向的相对距离(以下也称为实际相对距离d)。由位移传感器9检测到的实际相对距离d被发送到电连接的控制装置100。
[0042]
在本实施方式中,位移传感器9构成为获取图1所示的多个带轮2、3、4、6中其旋转轴12、31、41、8的弯曲刚性最小的从动带轮4和检测部9a之间的轴向的相对距离。由此,位移传感器9能够有效地检测旋转轴41因带5的张力而易于弯曲的从动带轮4和检测部9a之间的轴向的相对距离。
[0043]
[控制装置]
[0044]
图3是示出本实施方式的控制装置100和关联的周边结构的示意性功能框图。
[0045]
控制装置100例如是计算机等进行运算的装置,包括通过总线等相互连接的cpu(central processing unit,中央处理单元)、rom(read only memory,只读存储器)、ram(random access memory,随机存取存储器)、输入端口和输出端口等,并且执行程序。
[0046]
此外,通过程序的执行,控制装置100作为包括位移量运算部110、错位检测部120、带寿命估计部130和通知部140的装置发挥作用。这些各功能要素在本实施方式中作为包括在一体的硬件即控制装置100中的功能要素进行说明,但是它们中的任一部分也可以设置
在单独的硬件中。
[0047]
位移量运算部110(本发明的位移量运算装置的一例)基于从位移传感器9发送的实际相对距离d来运算从动带轮4的轴向位移量l1。以下,参照图4和图5对由位移量运算部110进行的轴向位移量l1的运算进行说明。
[0048]
图4是示意性示出位移传感器9检测出的实际相对距离d的时间变化的图。
[0049]
在从动带轮4相对于旋转轴41以预定的角度(大于0的角度)倾斜来安装的情况下,从动带轮4每旋转一圈,实际相对距离d就以包含最大值和最小值的正弦波状变化。
[0050]
从动带轮4每旋转一圈,位移量运算部110就将实际相对距离d的最大值(实际相对距离d的变化从增加变为减少时的拐点的值)逐次存储在存储器(存储装置)中,并运算该最大值的预定周期中的平均值。由此,能够减少施加极端外力时的位移传感器9的传感器异常值的影响。
[0051]
此外,在从动带轮4垂直于旋转轴41安装的情况下的从动带轮4和检测部9a之间的轴向的相对距离作为基准相对距离lk被预先存储在控制装置100的存储器中。位移量运算部110将从实际相对距离d的最大值的预定周期中的平均值减去基准相对距离lk后得到的值作为从动带轮4的轴向位移量l1进行运算(参照图5)。由位移量运算部110运算出的轴向位移量l1被发送到错位检测部120和带寿命估计部130。
[0052]
错位检测部120基于从位移量运算部110发送的轴向位移量l1来检测从动带轮4的错位。
[0053]
具体地,错位检测部120基于预先存储在控制装置100的存储器中的检测部9a和旋转轴41的轴心y之间的径向的距离l2和从位移量运算部110发送的轴向位移量l1,使用三角函数通过(1)式来运算图5所示的从动带轮4的倾斜度θ。
[0054]
arctan(l1/l2)=θ
······
(1)
[0055]
在从动带轮4的倾斜度θ超过预定的上限阈值(例如0.5~1.0度左右)的情况下,错位检测部120判定为从动带轮4发生了错位。由此,控制装置100能够检测从动带轮4的错位。
[0056]
另外,在从位移量运算部110未发送轴向位移量l1的情况下,设想的是,从动带轮4倾斜到反射光不被位移传感器9的检测部9a接收的程度、或者从旋转轴41偏离。此外,在从位移量运算部110发送的轴向位移量l1小于预定的下限阈值的情况下,设想的是,在从动带轮4和检测部9a之间夹有例如从发动机10脱离的未图示的托架等遮蔽物。在这种情况下,错位检测部120判定为不能检测错位或发生了异常。
[0057]
在本实施方式中,位移量运算部110基于实际相对距离d的最大值的预定周期内的平均值来运算轴向位移量l1。由此,防止了在位移传感器9的传感器值存在极端的异常值的情况下,错位检测部120立即判定为从动带轮4的错位或异常。错位检测部120的判定结果被发送到通知部140。
[0058]
带寿命估计部130(本发明的带寿命估计装置的一例)基于从位移量运算部110发送的轴向位移量l1来估计带5的寿命。
[0059]
具体而言,在控制装置100的存储器中存储有预先通过实验等求出的表示轴向位移量l1和带5的伸长量之间的关系的映射m1。这里,带5的伸长量越大,带5的张力越下降,带轮4因带5的张力而倾斜的量减少,因而轴向位移量l1也减少。因此,在映射m1中,轴向位移量l1越小,带5的伸长量就设定得越大。此外,旋转轴41的弯曲刚性越大,带轮4因带5的张力
而倾斜的量越减少,因而轴向位移量l1也减少。因此,在映射m1中,在预定的轴向位移量l1中,旋转轴41的弯曲刚性越小,带5的伸长量设定得就越大。
[0060]
另外,在控制装置100的存储器中存储有预先通过实验等求出的表示带5的伸长量和带5的寿命之间的关系的映射m2。在映射m2中,带5的伸长量越大,带5的寿命设定得就越短。
[0061]
首先,带寿命估计部130基于从位移量运算部110发送的轴向位移量l1,通过参照映射m1来估计带5的伸长量。
[0062]
接着,带寿命估计部130基于通过参照映射m1求出的带5的伸长量,通过参照映射m2来估计带5的寿命。带寿命估计部130在带5的寿命小于预定的下限寿命的情况下,判定为是带更换时期。
[0063]
另外,在从位移量运算部110未发送轴向位移量l1的情况下,设想的是,从动带轮4倾斜到反射光不被位移传感器9的检测部9a接收的程度、或者从旋转轴41偏离。此外,在从位移量运算部110发送的轴向位移量l1小于预定的下限阈值的情况下,设想的是,在从动带轮4和检测部9a之间夹有例如从发动机10脱离的未图示的托架等遮蔽物。在这种情况下,带寿命估计部130判定为不能估计带寿命或发生了异常。
[0064]
在本实施方式中,位移量运算部110基于实际相对距离d的最大值的预定周期内的平均值来运算轴向位移量l1。由此,防止了在位移传感器9的传感器值存在极端的异常值的情况下,带寿命估计部130将带5的寿命估计得过大或过少。由带寿命估计部130估计的带5的寿命和判定结果被发送到通知部140。
[0065]
通知部140通知从错位检测部120发送的判定结果以及从带寿命估计部130发送的带5的寿命和判定结果。
[0066]
具体而言,在从错位检测部120发送了从动带轮4发生错位或异常的判定结果的情况下,通知部140通知错位或异常的发生。通知部140例如通过指示灯50或未图示的画面通知错位或异常的发生。由此,能够适当地通知从动带轮4的错位或异常。
[0067]
此外,通知部140适当地通知从动带轮4的错位或异常,由此促进从动带轮4的检查或更换,从而能够抑制在发生了错位的状态下从动带轮4旋转并且在从动带轮4或带5上产生不均匀磨损。此外,通知部140也可以通过未图示的通信装置在设置于车辆中心200等的服务器中存储错位或异常的发生的信息。由此,能够进行适当的车辆的运行管理。
[0068]
此外,通知部140通过指示灯50或未图示的画面通知从带寿命估计部130发送的带5的寿命和判定结果。由此,能够容易地掌握带5的寿命。此外,能够优化带5的更换频率来抑制成本,并且能够将带装置1的故障或不良情况防止于未然。此外,通知部140也可以通过未图示的通信装置在设置于车辆中心200等的服务器中存储带5的寿命和判定结果的信息。由此,能够进行适当的车辆的运行管理。
[0069]
接着,基于图6对由本实施方式的控制装置100进行的从动带轮4的错位检测控制的流程进行说明。该控制例如与点火开关的on(接通)操作同时开始。
[0070]
在步骤s110中,位移量运算部110基于从位移传感器9发送的实际相对距离d运算从动带轮4的轴向位移量l1。
[0071]
在步骤s120中,错位检测部120基于从位移量运算部110发送的轴向位移量l1判定带装置1是否发生了异常。在错位检测部120判定为未发生异常的情况下(否),该控制进入
步骤140。另一方面,在错位检测部120判定为发生了异常的情况下(是),该控制进入步骤130。
[0072]
在步骤s130中,通知部140通知异常的发生。之后,该控制返回。
[0073]
在步骤s140中,错位检测部120基于从位移量运算部110发送的轴向位移量l1运算从动带轮4的倾斜度θ。
[0074]
在步骤s150中,错位检测部120基于从动带轮4的倾斜度θ判定从动带轮4是否发生了错位。在错位检测部120判定为未发生错位的情况下(否),该控制返回。另一方面,在错位检测部120判定为发生了错位的情况下(是),该控制进入步骤160。
[0075]
在步骤s160中,通知部140通知错位的发生。之后,该控制返回。
[0076]
接着,基于图7对由本实施方式的控制装置100进行的带5的寿命估计控制的流程进行说明。该控制例如与点火开关的on(接通)操作同时开始。
[0077]
在步骤s210中,位移量运算部110基于从位移传感器9发送的实际相对距离d运算从动带轮4的轴向位移量l1。
[0078]
在步骤s220中,错位检测部120基于从位移量运算部110发送的轴向位移量l1判定带装置1是否发生了异常。在错位检测部120判定为未发生异常的情况下(否),该控制进入步骤240。另一方面,在错位检测部120判定为发生了异常的情况下(是),该控制进入步骤230。
[0079]
在步骤s230中,通知部140通知异常的发生。之后,该控制返回。
[0080]
在步骤s240中,带寿命估计部130基于从位移量运算部110发送的轴向位移量l1估计带5的寿命。
[0081]
在步骤s250中,带寿命估计部130判定带5的寿命是否小于下限寿命。在带寿命估计部130判定为带5的寿命小于下限寿命的情况下(是),该控制进入步骤260。另一方面,在带寿命估计部130判定为带5的寿命为下限寿命以上的情况下(否),该控制进入步骤270。
[0082]
在步骤s270中,通知部140通知带5的寿命和不需要更换带的判定结果。之后,该控制返回。
[0083]
在步骤s260中,通知部140通知带5的寿命和需要更换带的判定结果。之后,该控制返回。
[0084]
以上,根据详细说明的本实施方式,位移量运算部110基于从动带轮4和设置在比从动带轮4更靠发动机10侧的位移传感器9的检测部9a之间的轴向的相对距离来运算轴向位移量l1。并且,错位检测部120构成为基于该轴向位移量l1运算从动带轮4的倾斜度θ。由此,错位检测部120能够以简单的结构可靠地运算从动带轮4的倾斜度θ,并且能够基于该倾斜度θ有效地检测从动带轮4的错位。
[0085]
此外,位移量运算部110构成为基于从动带轮4和位移传感器9的检测部9a之间的轴向的相对距离来运算从动带轮4的轴向位移量l1,并且带寿命估计部130构成为基于该轴向位移量l1来估计带5的寿命。由此,带寿命估计部130能够以简单的结构有效地估计带5的寿命,并且能够适当地通知适当的带更换时期。
[0086]
[其他]
[0087]
另外,本发明不限于上述的实施方式,并且能够在不脱离本发明的主旨的范围内适当地变形并实施。
[0088]
例如,在上述的实施方式中,说明了位移传感器9检测从动带轮4和检测部9a之间的轴向的相对距离的情况,然而也可以检测其他带轮2、3、6和检测部9a之间的轴向的相对距离。此外,也可以设置多个位移传感器9来分别检测多个带轮2、3、4、6和检测部9a之间的轴向的相对距离。
[0089]
此外,在上述的实施方式中,带装置1的带的卷绕方式是采用在多个带轮2、3、4、6上卷绕一个带5的所谓的螺旋形方式的情况进行了说明,然而也可以是在驱动带轮2和从动带轮3以及驱动带轮2和从动带轮4上分别卷绕单独的带而传递动力的方式。
[0090]
附图标记说明
[0091]1ꢀꢀꢀꢀꢀꢀ
带装置
[0092]2ꢀꢀꢀꢀꢀꢀ
驱动带轮
[0093]
3、4
ꢀꢀꢀ
从动带轮
[0094]5ꢀꢀꢀꢀꢀꢀ
带
[0095]6ꢀꢀꢀꢀꢀꢀ
张紧带轮
[0096]9ꢀꢀꢀꢀꢀꢀ
位移传感器(距离获取装置)
[0097]
9a
ꢀꢀꢀꢀꢀ
检测部
[0098]
10
ꢀꢀꢀꢀꢀ
发动机
[0099]
11
ꢀꢀꢀꢀꢀ
发动机主体部
[0100]
12
ꢀꢀꢀꢀꢀ
曲轴
[0101]
20
ꢀꢀꢀꢀꢀ
估计装置
[0102]
30
ꢀꢀꢀꢀꢀ
空调用压缩机
[0103]
40
ꢀꢀꢀꢀꢀ
交流发电机
[0104]
41
ꢀꢀꢀꢀꢀ
旋转轴
[0105]
50
ꢀꢀꢀꢀꢀ
指示灯
[0106]
100
ꢀꢀꢀꢀ
控制装置
[0107]
110
ꢀꢀꢀꢀ
位移量运算部(位移量运算装置)
[0108]
120
ꢀꢀꢀꢀ
错位检测部
[0109]
130
ꢀꢀꢀꢀ
带寿命估计部(带寿命估计装置)
[0110]
140
ꢀꢀꢀꢀ
通知部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1