光测距装置的制作方法
光测距装置
1.相关申请的交叉引用
2.本技术基于2020年4月15日申请的日本技术号2020-072685号,在此引用其记载内容。
技术领域
3.本公开涉及一种光测距装置。
背景技术:
4.已知有一种物标检测系统,该物标检测系统向预先设定的探测范围照射激光,利用多个受光元件接受来自物标的反射光来检测物标(例如,日本特开2014-098635号公报)。
5.在这样的物标检测系统中,存在若来自物标的反射光的强度增大,则因来自物标的反射光进一步被受光元件的表面朝物标反射而不能正确地检测物标的情况。
技术实现要素:
6.本公开是为了解决上述的技术问题的至少一部分而完成的,能够作为以下的方式或者应用例来实现。
7.根据本公开的一个方式,提供一种光测距装置。该光测距装置具备:发光部,射出射出光;受光部,具有用于接受入射光的受光像素,输出与上述受光像素接受到的上述入射光的受光强度对应的检测信号;以及控制装置,从上述受光部获取检测信号,并使用上述检测信号来检测距物体的距离,其中,上述受光部接受与被物体反射的上述射出光对应的反射光作为上述入射光,上述检测信号与上述反射光的受光强度对应。在检测出第一物体和第二物体,且判定为上述第二物体是与上述第一物体对应的伪物体的情况下,上述控制装置可以去除上述第二物体的检测结果,其中,上述第二物体在连结上述光测距装置和上述第一物体的直线的延长线上位于距上述第一物体的距离的n倍(n为2以上的自然数)的距离的位置。
8.根据该方式的光测距装置,在检测出第一物体和第二物体,且判定为第二物体是与第一物体对应的伪物体的情况下,去除第二物体的检测结果。因此,能够减少伪物体对距离的检测的影响,而正确地检测物标。搭载有光测距装置的车辆能够避免将第二物体检测为实际存在的物标,抑制或者防止执行用于避免与伪物体的碰撞的控制。
附图说明
9.通过参照附图进行下述的详细的描述,有关本公开的上述目的以及其他目的、特征、优点变得更加明确。
10.图1是表示第一实施方式的光测距装置的结构的说明图。
11.图2是表示受光部的结构的说明图。
12.图3是表示伪物体去除处理的流程图。
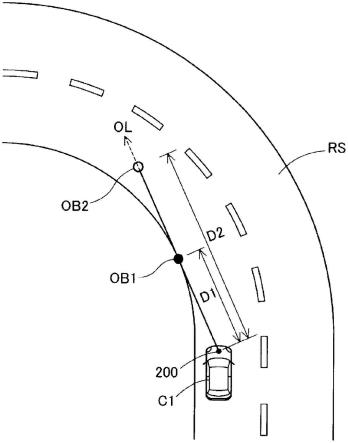
13.图4是以俯视图示出检测出第二物体的状态的说明图。
14.图5是表示第一物体和第二物体的峰值信号的说明图。
15.图6是以侧视图示出检测出第二物体的状态的说明图。
16.图7是对第二实施方式的光测距装置将第二物体判定为伪物体的条件进行说明的说明图。
17.图8是对第三实施方式的光测距装置将第二物体判定为伪物体的条件进行说明的说明图。
18.图9是对第四实施方式的光测距装置将第二物体判定为伪物体的条件进行说明的说明图。
19.图10是对第五实施方式的光测距装置判定为与杂波对应的峰值信号的条件进行说明的说明图。
具体实施方式
20.a.第一实施方式:
21.如图1所示,作为本公开中的第一实施方式的光测距装置200例如搭载于车辆等移动体来使用。光测距装置200检测与存在于所设定的测距范围的例如其他车辆、行人、建筑物等物体的距离、相对速度以及角度。光测距装置200的检测结果例如用于车辆的驾驶控制中。光测距装置200具备控制装置100,在壳体80内部具备发光部40、扫描部50以及受光部60。在壳体80的壁面具备透过激光的窗部82。
22.发光部40具备作为光测距的光源的激光二极管,射出作为测距用的射出光的激光dl。发光部40的光源除了激光二极管以外,也可以使用固体激光器这样的其他光源。
23.扫描部50作为所谓的一维扫描仪发挥功能。扫描部50具备反射镜51和旋转部52。反射镜51固定于旋转部52。旋转部52接受来自控制装置100的控制信号,以中心轴ax为旋转轴进行正转以及反转。从发光部40射出的激光dl被反射镜51反射,透过窗部82而向壳体80的外部射出。
24.激光dl通过伴随着旋转部52的旋转的反射镜51,沿着图1所示的s方向对预先决定的范围内进行扫描。以下,也将光测距装置200为了进行测距而扫描激光dl的范围称为扫描范围ra。s方向是激光dl的扫描方向,在本实施方式中,s方向与水平面平行。图1所示的v方向是后述的像素66的排列方向。v方向是与s方向垂直的方向,在本实施方式中,v方向与铅直方向平行。
25.受光部60接受入射光,输出与接受的入射光的受光强度对应的检测信号。在入射光中可能包含反射光rl、干扰光,其中,反射光rl对应于被扫描范围ra内的物标,例如图1所示的物体ob反射的激光dl,干扰光例如是太阳光、路灯的光、其他车辆的照明灯等。
26.控制装置100是具备公知的微处理器、存储器的微型计算机。通过微处理器通过执行预先储存于存储器内的程序,来实现控制部110、加法部120、直方图生成部130、峰值检测部140、伪物体判定部150以及距离运算部160的各部的功能。
27.控制部110执行发光部40、扫描部50以及受光部60的驱动控制。更具体而言,控制部110对发光部40输出使激光二极管发光的指令信号、对受光部60输出使受光元件激活的
地址信号、对扫描部50输出针对旋转部52的控制信号。
28.加法部120是将受光部60所具有的受光元件的信号强度相加的电路。直方图生成部130将加法部120的相加结果多次相加生成信号强度相对于时间轴的直方图。峰值检测部140对从直方图生成部130输入的直方图进行分析,检测与反射光rl对应的信号的峰值信号相对于时间的位置。直方图中的峰值信号表示反射光脉冲的强度,表示在与峰值信号所对应的tof(time of flight:飞行时间)相应的位置(距离)可能存在物体。检测出的峰值信号的位置被输出至伪物体判定部150。
29.伪物体判定部150使用由峰值检测部140检测出的峰值信号,来判定检测出的物体是否是伪物体。所谓的“伪物体”,意味着因从光测距装置200射出的射出光在物体和受光元件多重反射而被受光部60检测出的实际上不存在的物体。伪物体也被称为“ghost”。若搭载有光测距装置的车辆将伪物体检测为实际存在的物标,则例如可能执行制动控制等用于避免与伪物体的碰撞的控制。
30.若从发光部40射出的激光dl例如照射到高反射材料等具有较高的反射率的物体,则可得到较高的强度的反射光rl。若较高的强度的反射光rl入射至受光元件68,则反射光rl的一部分被受光元件68检测为与距物体的距离对应的一个峰值信号。未被受光元件68接受的反射光rl例如可能不入射至受光元件68而被受光元件68的表面反射并再次向物体方向行进。以下,也将被受光元件68的表面反射并再次向物体方向行进的反射光称为“第二反射光”。若第二反射光被物体反射而入射到受光元件68,则被检测为与反射光rl的峰值信号不同的与伪物体对应的峰值信号。在第二反射光未入射到受光元件68而进一步被受光元件68反射的情况下,被检测为与第二反射光又不同的峰值信号,以后也可以同样地重复。激光通过物体与受光元件的多重反射,而在光测距装置200与物体之间往复被物体反射的次数n(n为2以上的自然数)。因此,伪物体可以在从光测距装置200到物体的距离的n倍的位置被检测为峰值信号。
31.距离运算部160利用tof来进行距存在于扫描范围ra内的物标、例如物体ob的距离的测定。更具体而言,距离运算部160根据从发光部40射出激光dl的时刻到接受反射光rl的峰值信号的的时间、即激光dl的飞行时间,来运算距物体ob的距离。在本实施方式的光测距装置200中,执行后述的伪物体去除处理,在由伪物体判定部150检测出伪物体的情况下,距离运算部160去除与伪物体对应的检测结果检测距离,在未检测出伪物体的情况下,使用获取到的峰值信号来检测距离。
32.使用图2,对受光部60的结构进行说明。受光部60在受光面具备多个像素66。像素66在与s方向和v方向对应的二维平面上沿着v方向排列成长条的矩形状。图2所示的受光部60的排列相当于激光dl的扫描范围ra中的一个时隙的量的受光像素。
33.各像素66包含多个受光元件68。在本实施方式中,像素66在s方向以及v方向上分别由五个受光元件68排列。在本实施方式中,在受光元件68中,使用单光子雪崩二极管(spad)。各spad若输入光(光子),则可以输出表示光的入射的脉冲状的信号。加法部120通过对从各像素66的多个受光元件68输出的信号的个数进行计数,对每个像素66求出相加值。像素66可以由一个受光元件68构成,也可以包含两个以上的任意个数的受光元件68。受光元件68也可以以任意形状排列。在受光元件68中,也可以代替spad而使用pin光电二极管。
34.使用图3,对由本实施方式的光测距装置200执行的伪物体去除处理进行说明。例如,通过接通光测距装置200的电源来开始伪物体去除处理。例如,对扫描范围ra所包含的每个时隙(方向)的各像素66执行伪物体去除处理。图3所示的流程图示出扫描范围ra中的一个时隙(方向)中的一个像素66中的处理的例子。
35.如图3所示,控制装置100通过控制部110驱动控制发光部40、扫描部50、受光部60,开始扫描范围ra内的物标的检测以及距离的检测(以下,也称为“测距处理”)(步骤s10)。加法部120对从像素66的受光元件68输出的信号的个数进行计数,直方图生成部130生成信号强度相对于时间轴的直方图。峰值检测部140对直方图进行分析,通过从作为扫描范围ra内的一个物体的第一物体接受反射光,来检测第一物体的峰值信号(步骤s20)。
36.若检测出第一物体,则峰值检测部140确认在直方图中是否存在相当于第二物体的峰值信号、即是否检测出第二物体(步骤s30)。所谓的第二物体,意味着与第一物体一起检测出的物体中的可以判定为与第一物体对应的伪物体的物体。在本实施方式中,将在连结光测距装置200和第一物体的直线的延长线上、即激光dl的射出方向上,位于距第一物体的距离的n倍(n为2以上的自然数)的距离的物体判定为第二物体。在未检测出第二物体的情况下(s30:否),距离运算部160使用检测出的第一物体以及其他物体的峰值信号来检测距离(步骤s60),并完成处理。在检测出第二物体的情况下(s30:是),伪物体判定部150进行检测出的第二物体是否是伪物体的判定(步骤s40)。
37.在本实施方式中,在检测出不透过光的物体、即具有光非透过性的物体(以下,也称为“第三物体”),且在比第三物体更远离光测距装置200的位置检测出第二物体的情况下,伪物体判定部150判定为第二物体是伪物体。作为第三物体,例如,包含道路、地面、建筑物的墙面等具有光非透过性的各种物体。也可以根据光测距装置200的测距的结果来判定是否检测出第三物体,例如,也可以根据相机、雷达等光测距装置200以外的检测器的检测结果来判定。
38.若判定为第二物体是伪物体(s40:是),则距离运算部160从距离的运算中排除与第二物体对应的峰值信号,使用检测出的第一物体以及其他物体的峰值信号来检测距离(步骤s50),完成处理。也可以代替从距离的运算中排除与第二物体对应的峰值信号的处理,而执行从直方图中删除与第二物体对应的峰值信号的处理。在第二物体未被判定为伪物体的情况下(s40:否),距离运算部160使用检测出的第一物体以及第二物体和其他物体的峰值信号来检测距离(步骤s60),完成处理。
39.使用图4至图6,对由本实施方式的光测距装置200执行的伪物体去除处理的具体例进行说明。在图4中,示出搭载本实施方式的光测距装置200的车辆c1行驶于道路rs的状态。在图4中,概念性地示出第一物体ob1和作为与第一物体ob1对应的伪物体的第二物体ob2。第一物体ob1是利用了入射光朝向入射光的光源反射的所谓的递归反射的所谓的强反射材料。第一物体ob1例如也被称为回射器、隅角棱镜(corner cube)、递归反射器、递归反射材料等。来自第一物体ob1的反射光的强度可以比通常时大。如图4所示,第一物体ob1位于从光测距装置200朝向方向ol距离d1的位置,第二物体ob2位于从光测距装置200朝向方向ol距离d2的位置。距离d2相当于距离d1的2倍的距离。光测距装置200在车辆c1的行驶中完成作为第三物体的道路rs的检测。
40.如图4所示,为了测距而射出的向方向ol的激光被方向ol上的物体中的第一物体
ob1反射。如作为图5的信号强度的直方图示出的那样,来自第一物体ob1的反射光的一部分被受光部60的受光元件68接受,被检测为与第一物体ob1对应的峰值信号ps1。距离运算部160利用tof并使用检测出峰值信号ps1的时间t1来运算距第一物体ob1的距离d1。
41.第一物体ob1为强反射材料,来自第一物体ob1的反射光的强度较大。因此,来自第一物体ob1的反射光的一部分被受光部60的表面反射,作为第二反射光朝向方向ol前进。第二反射光被第一物体ob1反射而被受光元件68接受。如图5所示,由于入射到受光元件68的第二反射光在第一物体ob1与受光元件68之间往复两次,因此在方向ol上为距离d1的2倍的距离d2的位置被检测为与第二物体ob2对应的峰值信号ps2。
42.在图6中,概念性地示出从车辆c1的侧面侧观察通过光测距装置200检测第一物体ob1以及第二物体ob2的距离的情况的状态。如图6所示,光测距装置200与第一物体ob1和第二物体ob2一起检测道路rs。伪物体判定部150使用道路rs的检测结果和第二物体ob2的距离的检测结果来判定第二物体ob2是否在比道路rs更远离光测距装置200的位置。如图6所示,在直线ol上比作为第三物体的道路rs更远离光测距装置200的位置检测出第二物体ob2。因此,伪物体判定部150判定为第二物体ob2是伪物体。距离运算部160将与第二物体ob2对应的峰值信号从距离的运算中排除,使用第一物体ob1的峰值信号来检测距离。
43.以上,如说明的那样,根据本实施方式的光测距装置200,在检测出第一物体ob1和第二物体ob2,并且判定为第二物体ob2是与第一物体ob1对应的伪物体的情况下,去除第二物体ob2的检测结果。因此,能够减少伪物体的影响,正确地检测物标。搭载有光测距装置200的车辆能够避免将第二物体ob2检测为实际存在的物标,抑制或者防止执行用于避免与伪物体的碰撞的控制。
44.根据本实施方式的光测距装置200,在检测出作为具有光非透过性的第三物体的道路rs,且在比道路rs更远离光测距装置200的位置检测出第二物体ob2的情况下,伪物体判定部150将第二物体ob2判定为伪物体。通过将物理上未检测出物标的状态用作伪物体的判定条件,能够可靠地判定是否是伪物体。
45.b.第二实施方式:
46.使用图7对第二实施方式的光测距装置200进行说明。在第二实施方式的光测距装置200中,伪物体去除处理的步骤s40中的伪物体的判定方法与第一实施方式的光测距装置200不同,除此以外的结构与第一实施方式的光测距装置200相同。
47.本实施方式的光测距装置200在光测距装置200的移动中检测出第二物体的情况下,通过使用追踪第二物体相对于第一物体的相对位置的结果,来判定第二物体是否是伪物体。更具体而言,伪物体判定部150在从检测出第二物体的时刻起预先决定的期间内,追踪第二物体相对于第一物体的相对位置。所谓的预先决定的期间是光测距装置200的移动期间,可以设定为任意期间。在第二物体相对于第一物体的相对位置维持成为从光测距装置200到第一物体的距离的n倍的距离的位置的情况下,伪物体判定部150将第二物体判定为伪物体。
48.如图7所示,光测距装置200搭载于车辆c2。光测距装置200伴随着车辆c2的行驶,在预先决定的期间内依次在道路rs2上的位置cp1、位置cp2、以及位置cp3上移动。光测距装置200在位置cp1检测作为强反射材料的第一物体ob21,并且检测位置op1的第二物体ob22。光测距装置200在位置cp2检测第一物体ob21,并且检测位置op2的第二物体ob22,在位置
cp3检测第一物体ob21,并且检测位置op3的第二物体ob22。在从检测出第二物体ob22的位置cp1的时刻到车辆c2移动至位置cp3的时刻的预先决定的期间内,第二物体ob22相对于第一物体ob21的相对位置维持从光测距装置200到第一物体ob21的距离的2倍的距离。因此,伪物体判定部150将第二物体ob22判定为伪物体。
49.根据本实施方式的光测距装置200,在光测距装置200的移动中执行测距处理,在从检测出第二物体ob22的时刻起预先决定的期间内追踪第二物体ob22。在第二物体ob22相对于第一物体ob21的相对位置维持从光测距装置200到第一物体ob21的距离的n倍的距离的情况下,伪物体判定部150将第二物体ob2判定为伪物体。能够利用光测距装置200移动中的第二物体ob2的行为,来判定第二物体ob2是否是伪物体。因此,能够在光测距装置200的移动中判定第二物体ob2是否是伪物体。
50.c.第三实施方式:
51.使用图8对第三实施方式的光测距装置200进行说明。在第三实施方式的光测距装置200中,伪物体去除处理的步骤s40中的伪物体的判定方法与第一实施方式的光测距装置200不同,除此以外的结构与第一实施方式的光测距装置200相同。
52.在本实施方式的光测距装置200中,作为伪物体的判定方法,利用光的强弱与距光源的距离的平方成反比的所谓的光的衰减的法则。在第二物体的信号强度相对于第一物体的信号强度符合所谓的平方反比法则(inverse square law)的情况下,判定为第二物体是伪物体。更具体而言,在位于从光测距装置200到第一物体ob1的距离的n倍的距离的第二物体的信号强度相对于第一物体的信号强度与n的平方成反比的情况下,判定为第二物体是伪物体。
53.如图8所示,作为位于距光测距装置200距离d31的位置的强反射材料的第一物体ob31被检测为峰值信号ps31。位于距光测距装置200相当于距离d31的2倍的距离的距离d32的位置的第二物体ob22被检测为峰值信号ps32。图8所示的曲线pl是以到第一物体ob31的距离d31为基准,与相对于距离d31的比率的平方成反比的图表。在第二物体ob32的信号强度位于曲线pl上的情况下,伪物体判定部150判定为第二物体ob32是伪物体。不是仅限定于第二物体ob32的信号强度位于曲线pl上的情况,也可以考虑检测误差等,在第二物体ob32的信号强度位于包含曲线pl的预先决定的范围内的情况下,判定为第二物体ob32是伪物体。图8所示的距离d32是距离d31的2倍(n=2),峰值信号ps32的信号强度p32为n的平方分之一,是峰值信号ps31的信号强度p31的约四分之一。伪物体判定部150判定为第二物体ob32的信号强度相对于第一物体ob31的信号强度与n的平方成反比,判定为第二物体ob32是伪物体。
54.根据本实施方式的光测距装置200,在第二物体ob32的信号强度p32相对于第一物体ob31的信号强度p31与n的平方成反比的情况下,伪物体判定部150判定为第二物体ob32是伪物体。能够根据信号强度的直方图判定第二物体是否是伪物体,能够通过简易的方法检测伪物体。
55.d.第四实施方式:
56.使用图9,对第四实施方式的光测距装置200进行说明。在第四实施方式的光测距装置200中,伪物体去除处理的步骤s40中的伪物体的判定方法与第一实施方式的光测距装置200不同,除此以外的结构与第一实施方式的光测距装置200相同。
57.本实施方式的光测距装置200在检测出第一物体和第二物体后,执行基于使发光部40的输出比检测出第一物体和第二物体时的输出降低的第一测距条件的测距处理。光测距装置200也可以与第一测距条件一起或者代替第一测距条件执行基于使通过直方图生成部130从受光部60获取检测信号的次数比检测出第一物体和第二物体时的次数降低的第二测距条件的测距处理。
58.如图9所示,用虚线表示由峰值检测部140检测出的与作为强反射材料的第一物体ob41对应的峰值信号ps41以及与位于距第一物体ob41的距离的2倍的距离的位置的第二物体ob42对应的峰值信号ps42。在本实施方式中,若与第一物体ob41一起检测出第二物体ob42,则控制部110控制发光部40,在使激光的输出比检测出第一物体ob41和第二物体ob42时的输出降低的状态下,进行距离的检测。也将基于第一测距条件或第二测距条件中的至少任意一个条件的测距处理称为“强反射物检测处理”。在强反射物检测处理中被减少的激光的输出被设定为能够检测出作为强反射材料的第一物体ob41的峰值信号ps41w的程度的输出。通过减少激光的输出,如图9所示,与第一物体ob41对应的峰值信号ps41的信号强度p41减少,可得到具有信号强度p41w的峰值信号ps41w。与第二物体ob42对应的信号强度p42的峰值信号ps42消失,不被检测为峰值信号。这样,通过在检测出第一物体ob41和第二物体ob42后,执行强反射物检测处理,通过判定是否检测出第一物体ob41来判定第一物体ob41是否是强反射材料。在判定为第一物体ob41是强反射材料的情况下,伪物体判定部150将第二物体ob42判定为伪物体。
59.根据本实施方式的光测距装置200,在检测出第一物体ob41和第二物体ob42的情况下,执行使激光的输出比检测出第一物体ob41和第二物体ob42时的输出降低的强反射物检测处理,在检测出第一物体ob41的情况下,将第一物体ob41判定为强反射材料,将第二物体ob42判定为伪物体。因此,能够通过简易的方法来检测伪物体。
60.e.第五实施方式:
61.使用图10对第五实施方式的光测距装置200进行说明。第五实施方式的光测距装置200在除了第一实施方式的伪物体去除处理以外还进一步进行去除杂波的检测结果的杂波去除处理这一点上与第一实施方式的光测距装置200不同,除此以外的结构与第一实施方式的光测距装置200相同。所谓的“杂波”是指从发光部40射出的射出光被壳体80的窗部82反射的反射光。由于杂波可因入射至受光部60而被检测为峰值信号,因此存在使光测距装置200的测距精度降低的情况。一般而言,杂波被检测为距光测距装置200近距离,且强度比来自物体ob的反射光小的峰值信号。
62.在图10中,示出与杂波对应的峰值信号ps5。通过由峰值检测部140进行的直方图分析,与第一物体ob1的峰值信号ps1等一起检测出峰值信号ps5。在本实施方式中,在检测出的峰值信号的检测距离小于预先决定的时间阈值tt,且受光强度小于预先决定的强度阈值pt的情况下,伪物体判定部150判定为检测出的峰值信号是与杂波对应的峰值信号。距离运算部160去除与杂波对应的峰值信号ps5的检测结果,检测距离。
63.在图10中,示出受光强度可取的最大值pmax。最大值pmax是在制作直方图时所使用的每一个像素的受光元件68的总数。如在图2中说明的那样,一个像素66由5
×
5个受光元件68构成。在将n设为2以上的整数时,在合计n次发光的受光结果制作直方图的情况下,受光强度可取的最大值pmax等于n
×5×
5。强度阈值pt通常设定为比受光强度可取的最大值
pmax小的值。在本实施方式中,强度阈值pt设定为最大值pmax的50%的受光强度。强度阈值pt也可以设定为与最大值pmax相等的值。时间阈值tt设定为与光测距装置200相距近距离的任意的距离。时间阈值tt也可以设定为相当于从发光部40到窗部82的光路的距离的特定的飞行时间,也可以考虑到误差等而设定为比从发光部40到窗部82的光路的距离大的距离。在本实施方式中,时间阈值tt被设定为比从发光部40到窗部82的光路的距离大的距发光部40为1米。
64.根据本实施方式的光测距装置200,在测距处理时,除了伪物体的检测结果以外,还去除由杂波引起的峰值信号。因此,能够抑制由杂波引起的光测距装置200的测距精度的降低,更正确地检测物标。
65.其他实施方式:
66.本公开所记载的控制部及其方法也可以由专用计算机来实现,其中,该专用计算机通过构成被编程为执行通过计算机程序具体化的一个或者多个功能的处理器以及存储器来提供。或者,本公开所记载的控制部及其方法也可以由通过一个以上的专用硬件逻辑电路构成处理器而提供的专用计算机实现。或者,本公开所记载的控制部及其方法也可以由一个以上的专用计算机来实现,其中,上述一个以上的专用计算机通过被编程为执行一个或者多个功能的处理器和存储器以及由一个以上的硬件逻辑电路构成的处理器的组合构成。另外,计算机程序也可以作为由计算机执行的指令存储于计算机可读取的非过渡有形记录介质。
67.本公开不限于上述的实施方式,能够在不脱离其主旨的范围内以各种结构实现。例如,为了解决上述的问题的一部分或全部、或者为了达到上述的效果的一部分或全部,实施方式中的与在发明内容的栏中记载的技术特征对应的技术特征能够适当进行更换、组合。另外,如果该技术特征在本说明书中并没有说明是必需的,则可以适当地删除。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1