用于通过感应传感器的测量估算吸热马达以预定速度运行的时间的方法以及实施该方法的设备与流程
1.本发明涉及一种用于估算吸热马达以给定旋转速度运行的时间的方法,该方法特别适用于园林工具的吸热马达。
背景技术:
2.已知一些附件(即售后设备)适于联接到由吸热马达致动的园艺工具(例如链锯、灌木切割机或鼓风机,以自动测量其运行小时数。
3.一种类型的此类附件包括用于进行该运行时间测量的感应传感器。该感应传感器允许测量由在吸热马达的燃烧室中产生火花所需的电流的通过所产生的电磁场的变化和/或由吸热马达的自由轮中存在的磁体产生的电磁场的变化。感应传感器在该类型的附件中是特别有利的,因为它们具有非常低的能量消耗(如果不是零消耗),并且因此它们允许制造持久的电池供电的装置。
4.通常,感应传感器仅用于感测马达是启动的还是关闭的。然而,测量马达的总运行时间在监测工具磨损的范围内是有限的信息。例如,全程马达以最大旋转速度运行的工具的磨损相对于在相同的小时数下但在较小的负担条件下运行的工具必然会具有较大的磨损。
5.通过感应传感器可以测量由于火花塞的打火引起的磁场变化(以峰的形式),该磁场变化直接代表每分钟的转数。例如,单位时间内的二冲程中的打火的数量对应于单位时间内的转数。因此,感测打火的数量将确定旋转速度的频率(即单位时间内的转数),然后可以方便地将其转换为每分钟转数(rpm)。
6.然而,根据设置有感应传感器的附件所处的工具的位置,或者更好的是,可以定位其在工具上的位置(考虑到由于工具的形状,有时其定位是强制性的),也可以感测到与由于打火火花引起的电磁场变化重叠的其他电磁场变化(主要是由于马达的自由轮的磁体的旋转产生的)。
7.此外,由自由轮引起的电磁场变化的强度取决于感应传感器相对于马达的位置和方向。而且,在马达的整个运行转速范围内,它们并不总是与马达的转数成线性比例。
8.因此,这类问题使得不可能简单地基于对磁场中的变化(即磁场的变化峰值)进行计数来计算旋转速度。
9.本发明的一目的是在需要有限的计算时间的合理的、可负担得起的解决方案的范围内克服已知技术的缺点。该目的通过独立权利要求中指出的本发明的特征来实现。从属权利要求列出了本发明的优选和/或特别有利的方面。
技术实现要素:
10.本发明提供了一种用于通过感应传感器进行的测量来估算工具的吸热马达以预定旋转速度运行的时间的方法。
11.该方法包括以下步骤:
[0012]-在预设采样周期,通过在感测到电磁场的第一变化峰值时启动总时间间隔的测量的开始并且在感测到电磁场的最后变化峰值时终止总时间间隔的测量,来循环地测量总时间间隔,其中第一峰值和最后峰值是峰值序列的起始端和末端,峰值序列具有预定数量的连续的峰值,该峰值数量是至少等于6的并且是2和3的最小公倍数的正整数,
[0013]-从所测量的总时间间隔获得其各自的频率,
[0014]-使所测量的总时间间隔的多个预设频率范围可用,
[0015]-每次测量到具有落入预设频率范围内的频率的总时间间隔时,将对应的预设频率范围的出现次数增加1,
[0016]-在多个预设频率范围中选择两个具有最大出现次数的预设频率范围,其中具有最低频率的那一个预设频率范围代表最小速度的范围,具有最高频率的那一个预设频率范围代表最大速度的范围,
[0017]-通过计算至少最小速度的范围的一个频率与最大速度的范围的一个频率之间的算术平均值来计算总阈值频率,
[0018]-确定多个校正系数,每个校正系数通过将峰值序列的峰值数量分别除以1和除以以峰值数量为最小公倍数的正整数中的每一个正整数而获得,
[0019]-通过将多个校正系数中的每个校正系数乘以最小速度的频率范围的频率值来计算多个旋转频率,
[0020]-将所计算的旋转频率的值与指示吸热马达的怠速的预设参考频率范围进行比较,
[0021]-将多个校正系数中的与落入指示吸热马达的怠速的参考频率范围的旋转频率相对应的校正系数存储为低速的校正系数,
[0022]-通过将每个范围的频率值乘以低速的校正系数来计算低于阈值频率的每个预设频率范围的代表性旋转频率,
[0023]-存储所计算的代表性旋转频率,
[0024]-通过将多个校正系数中的每个校正系数乘以最大速度的频率范围的频率值来计算多个旋转频率,
[0025]-将所计算的旋转频率的值与指示吸热马达的最大运行的参考频率范围进行比较,
[0026]-将与落入指示吸热马达的最大运行的预设频率范围的旋转频率相对应的校正系数存储为高速的校正系数,
[0027]-通过将大于阈值频率的每个范围的频率值乘以高速的校正系数来计算大于阈值频率的每个频率范围的代表性旋转频率,
[0028]-存储所计算的代表性旋转频率,以及
[0029]-通过将每个频率范围的出现次数乘以预设采样周期的值来确定马达已经以每个频率范围的旋转频率运行的运行时间。
[0030]
得益于该方案,使得一种方法可用,该方法能够基于信息(即基于由感应传感器测量的磁场变化的唯一信息),精确地估算马达以近似给定旋转速度运行的运行时间,或者如果预设频率范围特别小,则能够估算马达以精确的旋转速度运行的运行时间。特别地,该方
法基于以下事实:当测量到由吸热马达产生的磁场变化时,根据感应传感器的位置和取向以及根据旋转速度,主要可能发生三种情况。
[0031]
第一种情况是,磁场的每个变化峰值都是由于打火引起的。该第一种情况在图5中用磁场变化强度随时间变化的图像来举例说明,其中由打火引起的峰值用ps表示。
[0032]
第二种情况是,由于自由轮的磁体的旋转而引起的磁场变化被插入由于打火而引起的两个磁场变化峰值之间。该第二种情况在图6和图7中用磁场变化强度随时间变化的图像来示出,其中由打火引起的峰值用ps表示,并且由自由轮的旋转引起的峰值用pw表示。
[0033]
第三种情况是,由于自由轮的磁体的旋转而引起的两个磁场变化被插入由于打火而引起的两个磁场变化峰值之间。
[0034]
因此,鉴于通常每一个、两个或三个测量的电磁场变化峰值存在一个由于打火而引起的电磁变化峰值,通过测量正整数数量(2和3的最小公倍数,即6个)的连续峰值之间的时间间隔,确保在每个采样周期内可以感测到由于打火引起的至少两个电磁变化峰值之间的时间间隔。因此,在第一种、第二种和第三种情况下确保了能够感测到由于打火引起的至少两个电磁变化峰值之间的时间间隔,该时间间隔指示马达的转数。实验数据还表明,在某些不太频繁的条件下,可能存在这样的情况,即,在由于打火引起的两个磁场变化之间插入了由于自由轮的旋转产生的干扰所引起的多于两个的磁场变化。因此,例如,为了提高该方法的通用性,可以任选地测量连续峰值序列的总时间间隔,连续峰值序列的数量是2、3和4的最小公倍数(即12),或者连续峰值序列的数量是2、3、4和5的最小公倍数(即60)。
[0035]
因此,基本上重要的是测量电磁场的变化,同时考虑峰值序列,该峰值序列是由于打火引起的两个连续峰值之间的可能距离的最小公倍数。
[0036]
每6个峰值的测量允许具有最佳的精确度并同时节约能量,因为相对于12个或60个峰值,在每个采样周期记录6个峰值时消耗较少。
[0037]
此外,尽管该方法不能精确地计算从一种情况到另一种情况的过程中的旋转速度,但是在使用这些工具的过程中,马达总是处于最大速度或最小速度,并在发生上述过渡时在中间速度下保持短时间,并且过渡迅速以致于该误差在使用的总小时数的计算中完全不相关。
[0038]
本发明的一方面提供了一种方法,包括以下步骤:
[0039]-使设置有吸热马达的多种类型的工具的数据库可用,其中每种类型的工具与指示该类型的工具的吸热马达的最大运行的参考频率范围相关联,
[0040]-允许从多种类型的工具的数据库中选择一种类型的工具,以及
[0041]-使用指示与所选择的类型的工具相关联的吸热马达的最大运行的参考频率范围,以执行所计算的旋转频率的值与指示吸热马达的最大运行的预设频率范围之间的比较。
[0042]
以这种方式,可以只使用一个装置将该方法的使用扩展到若干工具,因为不是所有的工具都具有相同的最大旋转速度。此外,该特征允许使得该方法相对于实施指示吸热马达的最大运行的单一的和宽的参考频率范围来说更加的精确。
[0043]
根据本发明的另一方面,测量至少一个预定的时间间隔的总数可以包括以下步骤:将工具的吸热马达从怠速旋转速度加速到最大旋转速度至少一次。
[0044]
本发明还提供了一种用于延迟估算工具的吸热马达以预定旋转速度运行的时间
的设备,该设备包括采集装置,采集装置具有:
[0045]-感应传感器,
[0046]-存储单元,
[0047]-无线发射器,
[0048]-电源电池,和
[0049]-电子控制和命令单元,其可操作地连接到感应传感器、无线发射器和存储单元,并且被配置为:
[0050]
o在预设采样周期,通过在感测到电磁场的第一变化峰值时启动总时间间隔的测量的开始并且在感测到电磁场的最后变化峰值时终止总时间间隔的测量,来循环地测量总时间间隔,其中第一峰值和最后峰值是峰值序列的起始端和末端,峰值序列具有预定数量的连续的峰值,该峰值数量是至少等于6的并且是2和3的最小公倍数的正整数,
[0051]
o从所测量的总时间间隔获得其各自的频率,
[0052]
o使所测量的总时间间隔的多个预设频率范围可用,以及
[0053]
o每次测量到具有落入预设频率范围内的频率的总时间间隔时,将对应的预设频率范围的出现次数增加1,
[0054]
该设备还包括远程装置,远程装置具有:
[0055]-无线接收器,
[0056]-处理单元,其可操作地连接到无线接收器,并且被配置为:
[0057]
o在多个预设频率范围中选择具有最大出现次数的两个预设频率范围,其中具有最低频率的那一个预设频率范围代表最小速度的范围,具有最高频率的那一个预设频率范围代表最大速度的范围,
[0058]
o通过计算至少最小速度的范围的一个频率与最大速度的范围的一个频率之间的算术平均值来计算总阈值频率,
[0059]
o确定多个校正系数,每个校正系数通过将峰值序列的峰值数量分别除以1,和除以以峰值数量为最小公倍数的正整数中的每一个正整数而获得,
[0060]
o通过将多个校正系数中的每个校正系数乘以最小速度的频率范围的频率值来计算多个旋转频率,
[0061]
o将所计算的旋转频率的值与指示吸热马达的怠速的预设参考频率范围进行比较,
[0062]
o将多个校正系数中的与落入指示吸热马达的怠速的参考频率范围的旋转频率相对应的校正系数存储为低速的校正系数,
[0063]
o通过将每个范围的频率值乘以低速的校正系数来计算低于阈值频率的每个预设频率范围的代表性旋转频率,
[0064]
o存储所计算的代表性旋转频率,
[0065]
o通过将多个校正系数中的每个校正系数乘以最大速度的频率范围的频率值来计算多个旋转频率,
[0066]
o将所计算的旋转频率的值与指示吸热马达的最大运行的参考频率范围进行比较,
[0067]
o将与落入指示吸热马达的最大运行的预设频率范围的旋转频率相对应的校正系
数存储为高速的校正系数,
[0068]
o通过将大于阈值频率的每个范围的频率值乘以高速的校正系数来计算高于阈值频率的每个频率范围的代表性旋转频率,
[0069]
o存储所计算的代表性旋转频率,以及
[0070]
o通过将每个频率范围的出现次数乘以预设采样周期的值来确定马达已经以每个频率范围的旋转频率运行的运行时间。
[0071]
得益于该解决方案,提供了一种设备,其能够准确地估算与其相关联的工具的运行小时数,并且由于由数据处理引起的能量消耗被转移到远程装置,因此相对于采集装置自身处理数据的情况,该设备需要的频繁维护间隔比采集装置的电池更少。
[0072]
根据本发明的另一方面,远程装置可以包括显示装置,并且处理单元被配置为在显示装置上显示报告,报告针对每个计算的代表性旋转频率值来显示与其相关联的运行时间。
附图说明
[0073]
借助于附图,在阅读通过非限制性示例提供的以下描述之后,本发明的其他特征和优点将变得更加明显。
[0074]
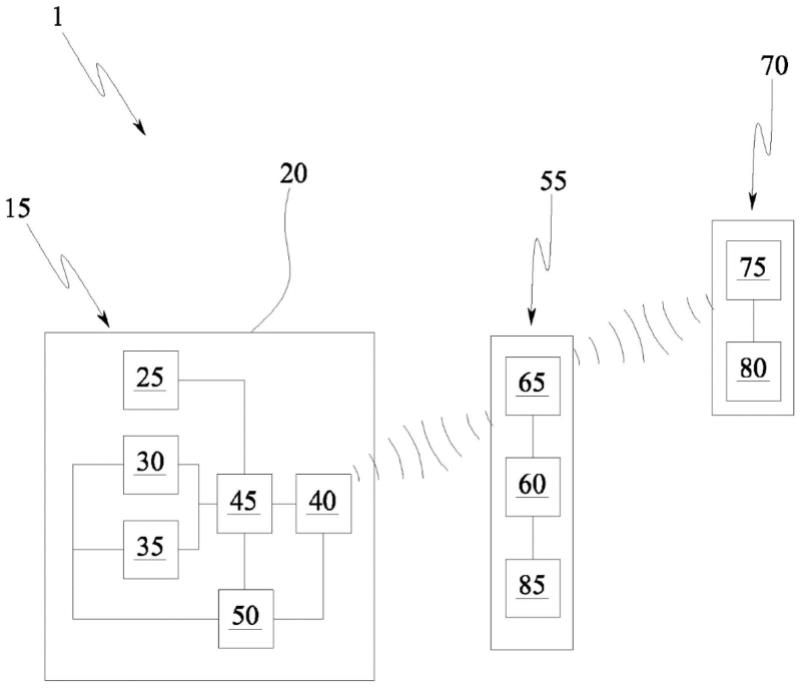
图1是根据本发明的用于延迟估算工具的吸热马达已经以预定旋转速度运行的时间的设备的示意图。
[0075]
图2是设有吸热马达的工具的视图,图1的设备的采集装置安装在该吸热马达上。
[0076]
图3是由采集装置测量的总时间间隔的频率的出现次数的直方图,该直方图可以由图1的设备的远程装置处理。该直方图的x轴表示频率(以赫兹为单位测量),y轴是出现的次数。
[0077]
图4是可以由根据本发明的设备的远程装置处理的报告的示意图。
[0078]
图5是当采集装置仅感测到由于打火引起的电磁场变化时,距图2的工具的吸热马达预定距离处的电磁场变化的图像。该图像的y轴表示由根据本发明的感应传感器测量的电磁场的增加的强度(因此以伏特v表示),并且x轴表示增加的时间t。
[0079]
图6是当采集装置感测到由于打火引起的电磁场变化和由于马达的自由轮引起的电磁场变化时,距图2的工具的吸热马达预定距离处的电磁场变化的图像。特别地,该图像示出了这样的情况,其中在电磁场的两个由于打火引起的变化峰值之间存在一个由于马达的自由轮的旋转引起的峰值。该图像的y轴表示由根据本发明的感应传感器测量的电磁场的增加的强度(因此以伏特v表示),并且x轴表示增加的时间t。
[0080]
图7是根据图6中描绘的情况的电磁场变化的图像,其中图示了根据本发明的预设采样周期δc和总时间间隔δt。
具体实施方式
[0081]
一种用于估算工具的吸热马达以预定旋转速度运行的时间的设备整体上用1表示,即大致以预定旋转速度运行,特别是以至少在最小旋转速度和最大旋转速度之中的一个旋转速度运行。
[0082]
特别地,该估算是延迟的,即在吸热马达的运行期间不是实时的。
[0083]
该工具优选地是园林工具,例如链锯、鼓风机(在附图中以附图标记5示出)、灌木切割机、树篱切割机、草坪修剪器或电动锄。
[0084]
这些工具都设有吸热马达,例如二冲程类型的吸热马达,该吸热马达被容纳在例如由塑料材料制成的保护性曲轴箱10中。该保护性曲轴箱还可以提供工具的抓握部分(例如手柄)。
[0085]
在使用期间,引擎几乎一直以最大旋转速度或最小旋转速度工作。
[0086]
设备1包括采集装置15,采集装置15设置有外壳20(例如盒状外壳),在外壳20内容纳有能够测量磁场和/或电磁场变化的感应传感器25。
[0087]
该感应传感器包括螺旋缠绕的导电线和/或由导电材料制成的线圈。
[0088]
对于吸热马达的情况,该电磁场变化主要是由于电流通过马达的相应线以在燃烧室中产生火花而引起的,和/或由于马达的自由轮的旋转而引起的。
[0089]
采集装置15包括直接容纳在外壳20中的存储单元。特别地,存储单元包括易失性存储装置30(通常称为ram)和非易失性存储装置35。
[0090]
值得注意的是,易失性存储装置意味着如果没有对存储装置供电,则存储装置会丢失存储在其中的数据,而非易失性存储装置被设计成如果没有对其供电仍保持存储的数据。
[0091]
采集装置15还包括容纳在外壳20中的无线发射器(例如蓝牙或wlan类型的无线发射器)。采集装置15优选地还包括容纳在外壳20中的收发器40(例如蓝牙或wlan类型的收发器),以便还接收外部命令。
[0092]
此外,采集装置15包括电子控制和命令单元45,该电子控制和命令单元45可操作地连接到感应传感器25、无线发射器(即无线收发器40)和存储单元(即易失性存储装置30和非易失性存储装置35),该电子控制和命令单元45也容纳在外壳20中。
[0093]
采集装置15(即其部件)通过容纳在外壳20中的电源(例如电池50)供电。电池50例如是扣式电池。
[0094]
优选地,感应传感器25由电池50供电。
[0095]
设备1还包括被配置为与采集装置15无线交互的远程装置55。该远程装置55可以包括无线接收器和处理单元60,处理单元60连接到该无线接收器并且被配置为处理由采集装置采集的数据。远程装置优选地包括(例如蓝牙或wlan类型的)无线收发器65,以便既从采集装置接收数据又发送命令。
[0096]
远程装置55例如可以是智能手机。
[0097]
设备1还可以包括设置有无线收发器75和处理单元80的另一远程装置70,处理单元80被配置为处理由采集装置采集的数据。在这种情况下,远程装置55将包括被配置为将采集装置采集的数据发送到另一远程装置的无线收发器,并且处理单元被配置为仅发送和接收采集装置15的数据以及来自另一远程装置的数据,并且它不被配置为处理来自采集装置的数据。
[0098]
该另一远程装置例如可以是通过因特网连接到远程装置的计算机。
[0099]
在这两种情况下,远程装置55都包括显示装置85,例如电子显示器。另外,该另一远程装置可以包括电子显示器形式的显示装置。
[0100]
上述设备1被配置为执行用于估算工具的吸热马达以预定旋转速度(即大约以预
定旋转速度),特别是以至少在最小旋转速度和最大旋转速度之中的一个旋转速度运行的时间的方法。
[0101]
特别地,该估算是延迟的,即在吸热马达的运行期间不是实时的。
[0102]
特别地,该方法包括与采集数据和存储数据相关的例如由采集装置15的电子控制和命令单元45执行的步骤序列,以及例如由远程装置55的处理单元60和/或由另一远程装置70的处理单元80执行的与处理所采集的数据相关的步骤序列。该方法还可以包括例如由远程装置55即其显示装置85执行的显示处理后的数据的连续步骤。
[0103]
为了执行该方法,有必要将感应传感器25(即设置有感应传感器25的采集装置)定位在离工具的吸热马达预定距离内,以便感应传感器能够拾取由吸热马达的运行所产生的磁场变化。例如,该距离小于10cm。特别地,方便的是将感应传感器25(即采集装置)紧固在工具的保护性曲轴箱10上。
[0104]
与采集和存储数据相关的步骤序列包括以下步骤:在预设采样周期δc循环地测量电磁场的第一个变化峰值和最后的变化峰值之间的总时间间隔δt,其中预设采样周期δc大于总时间间隔δt,即大于可测量的最大总时间间隔(参见图7)。例如,预设采样周期δc可以被设置为等于250ms,以便允许电能消耗和测量精度之间的最佳平衡。
[0105]
在采样周期δc循环地测量总时间间隔δt的步骤可以由操作者通过借助于适当的手动命令致动采集装置来手动地开始,或者优选地,该步骤的致动可以基于对感应传感器内的涡电流的监测而自动地发生,该涡电流由吸热马达的运行而引起的电磁场的变化而产生。例如在给定的时间段内,达到电磁场的预定变化值,则致动循环测量的开始。
[0106]
第一峰值和最后峰值是具有预定数量的连续峰值(即彼此紧接地连续)的峰值序列ps、pw的起始端和末端。序列的峰值数量是至少等于6的并且至少是2和3的最小公倍数的正整数。
[0107]
为了允许电能消耗和测量精度之间的最佳平衡,在所示的实施例中(见图7),峰的数量等于6,因此是2和3的最小公倍数。
[0108]
值得注意的是,峰值ps、pw意味着在预定阈值具有较大强度的电磁场变化。该阈值大于在吸热马达运行期间测量的平均磁场的强度值。
[0109]
此外,总时间间隔δt测量的开始和结束发生在相应峰值的向下部分。如图所示,峰值ps、pw可以被识别为电磁场变化,其具有向上的部分,随后是具有基本上恒定的强度的部分,再随后是向下的部分。
[0110]
详细地说,该步骤因此提供了感测电磁场的降低的梯度强度。因此,采集装置的电子控制和命令单元被配置为识别电磁场中变化的降低梯度。
[0111]
可替换地或附加地,可以提供监测在相对于阈值测量到(紧接的)先前增加之后电磁场值降低到预定阈值以下的时刻,将该情况的发生表示为峰值的感测。
[0112]
在实践中,该方法提供,即电子控制和命令单元被配置为,当其以所述方式感测到第一峰值时,在采样周期δc内开始测量总时间间隔δt,并且每当其感测到峰值ps、pw时,连续地将计量器的值增加1。一旦计量器达到等于峰值序列的峰值数量的数值,中断总时间间隔的测量,同时存储数据并中断电磁场变化的测量,直到新的采样周期δc开始。
[0113]
本文介绍的方法仅测量该峰值序列ps、pw的第一峰值和最后峰值之间的时间间隔,并且不提供测量峰值的强度或峰值持续的时间。这允许显着地节省电能。
[0114]
接着,与采集和存储数据相关的步骤序列可以包括优选地在易失性存储器中存储所测量的总时间间隔δt的值的步骤。
[0115]
然后,与采集和存储数据相关的步骤序列包括从所测量的总时间间隔获得其各自的频率的步骤。
[0116]
特别地,如已知的,通过将1除以所测量的总时间间隔来计算频率,该总时间间隔具有以秒为单位测量的值。以该方式,获得以赫兹为单位(即s-1
)的频率值。
[0117]
该方法使所测量的总时间间隔δt的多个预设频率范围rf1、rf2、rf3、rf4、rf5、rf6、rf7可用。即,该方法使多个计量器可用,每个计量器与总时间间隔的一预设频率范围相关联。仅举例来说,每个频率范围具有5赫兹的幅度,并且范围整体从20赫兹开始并且在70赫兹结束。
[0118]
预设频率范围rf1、rf2、rf3、rf4、rf5、rf6、rf7的值例如被存储在非易失性存储装置35中。
[0119]
与采集和存储数据相关的步骤序列包括以下步骤:每次测量到具有落入预设频率范围rf1、rf2、rf3、rf4、rf5、rf6、rf7内的频率的总时间间隔时,将总时间间隔δt的对应的频率范围rf1、rf2、rf3、rf4、rf5、rf6、rf7的出现次数增加1。
[0120]
即,提供每当测量到具有落入预设频率范围内的频率的总时间间隔时,致动相应预设频率范围rf1、rf2、rf3、rf4、rf5、rf6、rf7的计量器,直到总数增加1,即出现次数增加1。
[0121]
详细地说,可以提供电子控制和命令单元以将所测量的总时间间隔的频率值与预设频率范围的范围进行比较,并且当所测量的值与存储在存储器中的范围之间存在对应关系时,将出现次数增加1。
[0122]
值得注意的是,出现次数意味着给定事件随时间重复的次数。例如,如果在测量期间,感测到30赫兹频率的吸热马达100次,感测到31赫兹频率的吸热马达100次,感测到32赫兹频率的吸热马达100次,感测到33赫兹频率的吸热马达100次,感测到34赫兹频率的吸热马达100次,由此从30赫兹到34赫兹的预设频率范围rf2的出现次数是500次。
[0123]
图3示出了通过本文介绍的方法创建的出现次数的图像,其中y轴为出现次数,用n表示(出现次数没有测量单位),x轴为频率(赫兹),示出了预设频率范围rf1、rf2、rf3、rf4、rf5、rf6、rf7。该出现次数的图像示出了本方法的一部分,并且可以在本方法期间被创建和显示以检查本方法的正确运行。然而,对于本方法的正确运行,创建和/或显示该出现次数的图形不是必需的。
[0124]
如果采集装置既具有易失性存储器又具有非易失性存储器,则与采集和存储数据相关的步骤序列可以包括以下步骤:在易失性存储器中存储相应频率范围内的出现次数,直到达到预定的最大值,当达到预定的最大值时,将出现次数存储在非易失性存储器中。也可以提供,在从一个存储器传输到另一个存储器期间,在非易失性存储器中存储的出现次数对于在易失性存储器中达到的出现次数的每个最大值可以都是一次。
[0125]
作为示例,如果采样周期等于250ms,则校准该步骤的选项可以提供设置预定最大值为240,使得达到该最大值对应于马达在预设频率范围内运行一分钟。以这种方式,例如,可以每在易失性存储器中存储的测量频率的相同范围内到达240的出现次数,则将非易失性存储器中的出现次数增加1,这意味着在非易失性存储器中存储热马达以预定速度运行
的一分钟。值得注意的是,这不是在预设的旋转频率范围内连续的一分钟,而是指示在使用期间,马达在落入给定范围内的旋转频率下整体运行一分钟。
[0126]
该方法还可以提供在感测到吸热马达的活动之后感测吸热马达的未使用的情况下,为其将测量的数据存储在非易失性存储器中,包括在没有达到出现次数的预定的最大值的情况下。
[0127]
与采集和存储数据相关的步骤序列以存储预设频率范围的出现次数而结束。因此,由采集装置15执行的操作结束。
[0128]
特别地,该步骤在测量至少一个预定的时间间隔δt的总数之后结束。
[0129]
此时,该方法提供了将预设频率范围的出现次数的数值从采集装置15传送到远程装置55的步骤,该远程装置55例如可以再将它们发送到另一远程装置70。
[0130]
测量和存储的数据的传送可以自动地执行,例如通过使远程装置接近采集装置,直到相应的收发器装置40、65在远程装置和采集装置之间建立通信。
[0131]
与处理所采集的数据相关的步骤序列开始于以下步骤:比较所测量的总时间间隔的每个预设频率范围rf1、rf2、rf3、rf4、rf5、rf6、rf7的出现次数,以及识别具有最大出现次数的两个预设频率范围,在这两个预设频率范围之中标记具有最低频率(即,较低频率)的那一个以指示最小速度的旋转频率范围,并且标记另一个(即,两者之间具有最高频率的那个)以指示最大速度的旋转频率范围。
[0132]
特别地,提供了选择预设频率范围,该选择的预设频率范围具有最大的出现次数并且相对于指示中间旋转速度的预设频率值具有较小的频率,并且表示该预设频率范围指示最小速度的旋转频率范围。特别地,提供了选择预设频率范围,该选择的预设频率范围具有最大的出现次数并且相对于指示中间旋转速度的预设频率值具有较小的频率,并且表示该预设频率范围指示最小速度的旋转频率范围。
[0133]
作为例子,这两个范围在图3中分别表示为min(预设频率范围rf2从30赫兹到35赫兹),以及max(预设频率范围rf7从55赫兹到60赫兹)。
[0134]
然后,通过计算至少最小速度的范围的一个频率与最大速度的范围的一个频率之间的算术平均值来计算总阈值频率。例如,为了计算该总阈值频率,可以采用指示马达以最小速度旋转的预设频率范围的最低端,以及指示马达以最大速度旋转的预设频率范围的最高端。
[0135]
然后,可以通过将峰值序列的峰值数量分别除以1和除以以峰值数量为最小公倍数的正整数中的每一个正整数来确定多个校正系数。详细地,在确定以峰值数量为最小公倍数的正整数后,通过将峰值序列的峰值数量除以1来获得第一校正系数,通过将峰值数量除以以峰值数量为最小公倍数的一正整数来获得第二校正系数,通过将峰值数量除以以峰值数量为最小公倍数的另一正整数来获得第三校正系数,等等。显然,排除了通过将峰值数量除以与其相同的数来计算校正系数,因为校正系数将等于1,因此它将不是校正系数。
[0136]
在所示的峰值数量为6的实施例中,通过将6除以1、除以2和除以3,从而获得6、3和2作为校正系数。校正系数6应用于6个峰值中峰值序列的每一个测量的峰值都是由于由打火而引起的磁场变化的情况。校正系数3应用于6个峰值中的仅3个是由于由打火而引起的磁场变化的情况,因为在每两个由于打火而引起的磁场变化之间插入了另一种性质的一个电磁场变化(特别地,由于自由轮的旋转而引起的电磁场变化)。校正系数2应用于6个峰值
中的两个是由于由打火而引起的磁场变化的情况,因为在每两个由于打火而引起的磁场变化之间插入了另一种性质的两个电磁场变化。
[0137]
与处理所采集的数据相关的步骤序列继续通过多个校正系数中的每个校正系数乘以最小速度的频率范围的频率值(优选地最小速度的频率范围的最低端)来计算多个旋转频率。
[0138]
然后,将所计算的旋转频率的值与指示吸热马达的怠速的(预设)参考频率范围进行比较。例如,该指示吸热马达的怠速的参考频率范围包括对应于马达在最小2200rpm和最大4000rpm之间运行的频率。
[0139]
通常,工具中使用的所有引擎都具有被包括在该范围内的怠速。
[0140]
该指示怠速的参考频率范围例如可以被存储在远程装置或另一远程装置的非易失性存储器中。
[0141]
与处理所采集的数据相关的步骤序列继续将所述多个校正系数中的与落入指示吸热马达的怠速的参考频率范围的旋转频率相对应的校正系数存储为低速的校正系数,并且通过将每个范围的频率值乘以低速的校正系数来计算低于阈值频率的每个预设频率范围的代表性旋转频率。优选地,用来乘以低速校正系数的每个预设频率范围的频率值是该范围的最低端。
[0142]
然后,根据远程装置和另一远程装置中的哪一个远程装置处理数据,将所计算的代表性旋转频率存储在例如远程装置或另一远程装置的非易失性存储器中。
[0143]
与处理所采集的数据相关的步骤序列继续通过将多个校正系数中的每个校正系数乘以最大速度的频率范围的频率值来计算多个旋转频率,优选地乘以最大速度的频率范围的最高端来计算多个旋转频率。
[0144]
然后,将所计算的旋转频率的值与指示吸热马达的最大运行的(预设)参考频率范围进行比较。
[0145]
例如,为了提高精度,该方法可以提供使具有吸热马达的多种类型的工具(包括例如上文列出的那些)的数据库可用,其中每种类型的工具与指示该类型的工具的吸热马达的最大运行的预定参考频率范围相关联。因此,提供允许从多种类型的工具的数据库中选择一种类型的工具,和与所选择的类型的工具相关联的指示吸热马达的最大运行的参考频率范围,以执行所计算的旋转频率的值与指示吸热马达的最大运行的参考频率范围之间的比较步骤。
[0146]
该方法也可以为最小速度的参考频率值提供这样的预见。
[0147]
指示最大运行的该参考频率范围例如可以被存储在远程装置或另一远程装置的非易失性存储器中。
[0148]
与处理所采集的数据相关的步骤序列继续将与落入指示吸热马达的最大运行的参考频率范围的旋转频率相对应的多个校正系数中的校正系数存储为高速校正系数,并且通过将每个预设频率范围的频率值乘以高速校正系数来计算高于阈值频率的每个预设频率范围的代表性旋转频率。优选地,用来乘以高速校正系数的每个预设频率范围的频率值是该范围的最高端。
[0149]
然后,所计算的代表性旋转频率优选地被存储在远程装置或另一远程装置的非易失性存储器中。
[0150]
然后,通过将每个频率范围的出现次数乘以预设采样周期δc的值,并在连接直至存在双向单一连接的意义上关联在相应的预设频率范围计算的运行时间,以确定马达已经以每个预设频率范围的旋转频率运行的运行时间。
[0151]
如果存在易失性存储器和非易失性存储器两者,则对存储在非易失性存储器中的出现次数进行该计算,因此出现次数已经表示马达的运行分钟数。
[0152]
此时,该方法可以提供将所计算的代表性旋转频率的值转换为每分钟的转数,即rpm。测量单位的这种转换通过将频率的值(赫兹)乘以60而实现。
[0153]
该方法还可以提供在显示装置85上显示报告的步骤(例如图4所示),该报告针对优选地以每分钟转数显示的每个计算出的代表性旋转频率值来指示与其相关联的运行时间。
[0154]
作为该显示步骤的替代或附加地,该方法可以提供将与代表性旋转频率的预选值相关联的运行时间值与给定旋转速度下的运行时间的预定阈值进行比较,并且如果超过该阈值,则产生警报信号。例如,该方法可以提供将与最大速度的预设频率范围相对应的代表性频率值的运行时间值与马达在最大速度下的运行时间的预设阈值进行比较。
[0155]
尽管已经说明了一种方法,该方法中从总时间间隔获得频率并且连续的步骤提供了处理该计算的频率,但是其中未获得该频率并且连续的步骤是时间间隔的函数的方法是完全等同的,注意分析所测量的值的出现次数,同时考虑到指示最大旋转速度的柱现在处于低于出现次数的两个最大柱之间的平均值的值(该值是时间间隔的值),而指示怠速旋转速度的柱现在相对于两个最大柱之间的平均值具有更大的值。
[0156]
在未示出的实施例中,对于整个方法直到将运行时间与预定旋转速度相关联的部分,不排除单独由采集装置执行。在此,远程装置仅执行显示所获得的数据的步骤,即创建该数据的报告的步骤。在未分配采集装置15处理数据时,该实施例会失去采集装置15的电池的消耗减少的优点,并且还将失去采集装置特别简单,因此坚固且可负担的优点,然而,在任何情况下都允许获得与权利要求1的特征相关联的优点。
[0157]
根据本发明的方法的设备的操作如下。使用者将采集装置15安装在工具的保护性曲轴箱10上,例如通过粘合剂或不可拆卸的连接构件或可拆卸的连接构件将其紧固。然后,在工具的吸热马达的运行期间,采集装置存储将由远程装置55或由另一远程装置70进行强制处理的数据。特别地,一旦工具的使用完成,使用者可以使远程装置55接近采集装置15,从而在两者之间建立无线通信,例如以便允许将采集的数据传送到远程装置。根据该配置,所采集的数据可以直接由远程装置处理或者被发送到另一远程装置以进行处理。如果数据被发送到另一远程装置70,则所采集的数据被同时存储在远程装置55中,直到可能在远程装置和另一远程装置之间建立连接。一旦数据已经被处理以获得在代表性旋转速度下的运行时间,该数据被显示在显示装置中(例如以如图4中的报告的形式)。
[0158]
由此构思的本发明容易受到许多修改和变型的影响,所有这些修改和变型都落入同一发明构思内。
[0159]
此外,所有的细节可以由其他技术上等同的元件代替。
[0160]
在实践中,根据需要,可以使用任何材料以及任何可能的形状和尺寸,而不脱离所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1