使用超声波成像的动态检测方法与流程
本发明涉及诸如金属产品的无损符合性检测之类的无损检测领域。更具体地,本发明涉及用于管状金属产品内缺陷的存在的超声波检测。
背景技术:
1、金属管道广泛用于能源工业的各个领域,比如发电、石油和天然气以及机械工程。与大多数冶金产品一样,管道易受制造缺陷的影响,比如钢中包含的材料、其内表面或外表面上的裂纹,或者甚至多孔性。通常,钢基体中的任何不均匀性都被认为是可能会在使用期间不利地影响管道的机械强度的缺陷。
2、于是,在制造管道之后对管道进行检测,不仅为了探测其中的任何缺陷,而且在适当的情况下,还为了确定有益于评估这些缺陷的危险性的信息,特别是它们的尺寸、深度、位置、性质甚至取向,以及这些管道是否符合标准。
3、特别地,使用利用超声波的无损检测技术。超声波传播通过管道,并在管道反射的波中寻找不能归因于管道的几何形状的波。诸如材料的任何包含或缺失之类的缺陷构成波的传播介质内的变化,并因此当它们被这些超声波撞击时导致超声波的一些能量被反射。
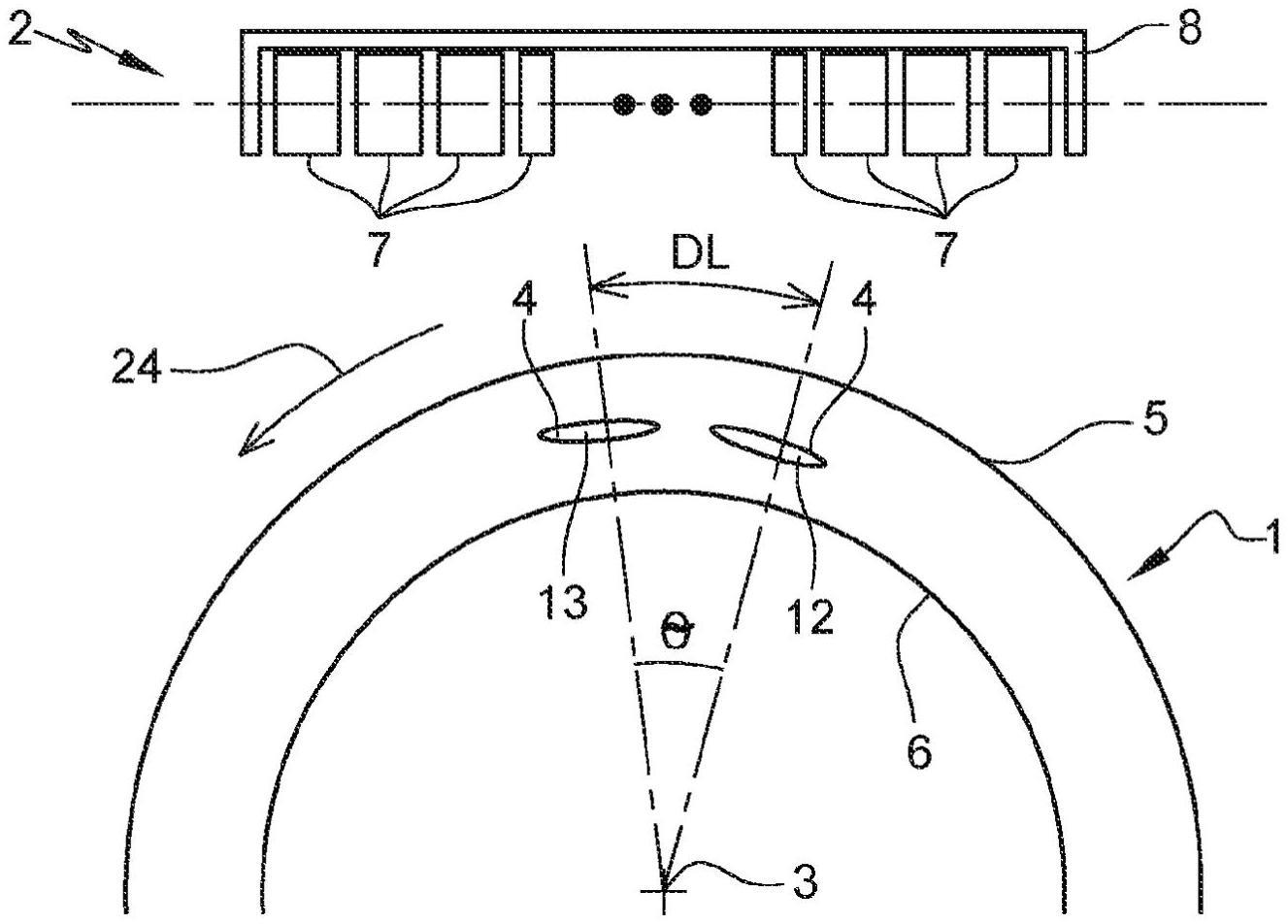
4、用于使用超声波进行检测的一种传感器是多元件、顺序控制型传感器,通常称为“多元件换能器”或“相控阵换能器”。这种类型的传感器包括通常为压电元件形式的多个电声元件。这些压电元件可以分布在围绕待检测管道的传感器的有源面上,或者沿主对准方向分布,以便形成“阵列”。
5、在称为fmc(全矩阵捕获)的获取策略中,对于包含n个元件的多元件传感器,传感器的n个元件中的每个元件被激发一次,这n个元件被连续激发,以便产生n个连续的超声波射击。处理电路记录传感器的n个元件对于n个发射中的每一个的单独响应(以下称为a-scan)。对于每个元件,该单独响应表示在给定的收听持续时间内由所述元件接收的超声波的振幅。然后,可以通过tfm(全聚焦法)算法组合n2个记录的a-scan,获得代表一段管道的图像。
6、为了在管道的整个表面上获得tfm图像,从多个连续射击(shot)中进行获取需要传感器相对于管道的连续相对移动。对于整个一系列的n个射击,传感器相对于管道被保持在固定位置,以便在该位置获得管道的静态模式tfm图像,然后相对于管道移动传感器,以便进行下一系列的n个射击,以获得管道的下一图像。
7、这种方法允许获得管道的精确图像,但是需要较长的获取时间。于是,需要一种快速且可靠地获得待检测部件的精确图像的方法。
技术实现思路
1、本发明基于的想法是快速可靠地获得表示待检测部件的数据,例如管道的tfm图像或a-scan。特别地,本发明基于的想法是在用于获得所述数据的传感器和待检测部件之间的相对移动期间获得表示待检测部件的数据。更具体地,本发明基于的想法是在传感器和待检测部件之间的连续相对移动期间获得所述数据。本发明基于的想法考虑到传感器和待检测部件之间的相对移动,以生成表示待检测元件的可靠和精确的数据。
2、按照一个实施例,本发明提供一种用于动态获取表示待检测部件的数据的方法,所述方法包括:
3、-获取关于待检测部件的数据的步骤,所述数据由多元件传感器获得,所述传感器包括发射元件和接收元件,所述发射元件被配置为向待检测部件发射相应的超声波射击,以使得所述超声波射击传播通过待检测部件,所述接收元件被配置为接收由所述超声波射击导致的被待检测部件反射的反射波,即部分反射和/或输入到所述部件中然后至少部分反射或离开的反射波,所述获取步骤包括:
4、-从所述发射元件发射超声波射击;和
5、-所述接收元件在监听持续时间期间接收超声波,所述接收的超声波包括由发射的超声波射击导致的被待检测部件反射的反射波;
6、所述方法还包括根据由所述接收元件接收的波生成表示待检测部件的数据的步骤;
7、其特征在于所述方法还包括在所述数据获取步骤期间在所述传感器和所述待检测部件之间的相对移动;
8、并且其特征在于所述方法还包括生成表示待检测部件的校正数据的步骤,所述生成校正数据的步骤包括:
9、-根据所述传感器和所述待检测部件之间的相对移动、参考位置和相对于参考时刻的持续时间来计算校正移动,参考位置对应于在参考时刻所述传感器和所述待检测部件之间的相对位置,所述参考时刻发生在所述数据获取步骤期间,所述校正移动对应于所述传感器和所述待检测部件之间从与所述传感器和所述待检测部件之间在与所述参考时刻相比所述持续时间的时刻的相对位置相对应的相对位置一直到所述参考位置的相对移动;以及
10、-根据计算的校正移动对表示所述待检测部件的数据实施校正,以便通过模拟所述传感器和所述待检测部件之间从所述传感器和所述待检测部件之间在所述持续时间的所述时刻的相对位置一直到所述参考位置的相对移动,来生成所述校正数据。
11、表示待检测部件的数据被理解为与待检测部件的形状、厚度、介质的差异等相关的信息。例如,表示待检测部件的该数据可以采用待检测部件的横截面图像、包括待检测部件的多个a-scan的矩阵、所述待检测部件的a-scan的形式或任何其他形式。此外,相对于参考时刻的持续时间对应于表示待检测部件的数据的获取时间与参考时刻之间的时间差,该持续时间为正还是为负取决于所述获取时间是在参考时刻之前还是之后。
12、借助这些特征,可以快速且可靠地获得表示待检测部件的数据。事实上,借助这些特征,由于传感器和待检测部件彼此相对运动,因此可以快速获得该数据。此外,归因于根据传感器和待检测部件之间的相对移动、参考位置和相对于参考时刻的持续时间实施校正,尽管在获取所述数据期间传感器和待检测部件之间存在相对移动,仍然可以在参考位置高精度地获得表示待检测部件的数据。
13、根据实施例,这种动态获取方法可以包括以下特征中的一个或多个特征。
14、按照一个实施例,传感器和待检测部件之间的相对移动是连续的。获取数据期间的这种连续移动为所述方法提供了良好的执行速度。
15、待检测部件可以采用多种形式。按照一个实施例,待检测部件是管道。这种管道可以采用许多横截面形状,比如圆形、方形或其他形状。类似地,这种管道可以具有恒定或可变的厚度。
16、按照一个实施例,对表示待检测部件的数据实施校正包括对表示待检测部件的数据实施虚拟移动(例如,围绕待检测部件的旋转轴的虚拟旋转)以便生成校正数据的步骤。虚拟移动被理解为表示待检测部件的轮廓的数据的修改,以便模拟待检测部件的校正移动,而不需要所述待检测部件物理地进行这样的校正移动。
17、按照一个实施例,计算校正移动包括针对表示部件的多个或每个数据计算相应的校正移动。按照一个实施例,相应校正移动的相对于参考时刻的持续时间对应于相对于参考时刻的与所述传感器和由表示待检测部件的所述数据表示的待检测部件之间的相对位置对应的时刻与所述参考时刻之间的时间差相对应的持续时间,该持续时间为正还是为负取决于由表示要校正的待检测部件的数据表示的所述时刻是在参考时刻之前还是之后。按照一个实施例,根据与表示待检测部件的所述数据关联的相应校正移动,针对表示待检测部件的一个、多个或每个数据执行校正的实施。
18、按照一个实施例,数据获取步骤包括:
19、-优选地随时间的过去连续地发射多个超声波射击;以及
20、-对于发射所述超声波信号的每个步骤,在相应的监听持续时间期间由所述传感器的所述接收元件接收超声波的对应步骤,所述接收的超声波包括由对应的发射的超声波射击导致的被待检测部件反射的至少一个反射波;
21、并且其中所述参考时刻是所述多个超声波射击中的一个超声波射击的发射时刻,并且所述持续时间是分离所述多个超声波射击中的两个连续超声波射击的持续时间的倍数,以使得根据在两个不同的超声波射击的发射之间所述传感器和所述待检测部件之间的相对移动,来计算校正移动。
22、两个超声波射击,并且优选所有超声波射击是顺序地激发的,即,在不同的发射时刻激发的,以便避免从不同的发射元件发射的超声波之间的干扰。
23、可以针对传感器和待检测部件之间的相对移动的不同部分计算校正移动。按照一个实施例,根据在两个不同的超声波射击,例如,两个连续的超声波射击的发射之间所述传感器和待检测部件之间的相对移动,来计算校正移动。换句话说,按照一个实施例,参考位置是在与超声波射击的发射对应的参考时刻所述传感器和待检测部件之间的相对位置。
24、借助这些特征,特别是借助从传感器的多个发射元件发射多个射击,可以在所述待检测部件的不同取向上获得关于待检测部件的信息。特别地,每个超声波射击允许沿着识别的超声波的路径获得与待检测部件相关的一组数据,其中所述路径从发射元件的位置开始,并产生反射波,反射波在接收所述反射波的接收元件的相应位置被接收。
25、按照一个实施例,生成校正数据的步骤包括选择参考位置。按照一个实施例,参考位置对应于在所选超声波射击期间待检测部件和所述传感器之间的相对位置。按照一个实施例,参考位置以及于是对应的参考时刻是预先提供的,例如通过默认选择,例如通过存储在实现所述方法的系统的存储器中。按照一个实施例,参考位置是在第一个射击的时刻所述传感器和待检测部件之间的相对位置。按照一个实施例,参考位置是在最后发射的超声波射击的时刻所述传感器和待检测部件之间的相对位置。
26、因此,可以在定义的位置(通常是参考位置)获得待检测部件的清晰图像。
27、表示待检测部件的数据可以采用多种形式。
28、按照一个实施例,表示待检测部件的数据包括随时间的过去,从待检测部件反射并由所述传感器的一个或多个或每个接收元件接收的超声波的强度。这种形式的表示待检测部件的数据在下文中被称为a-scan。按照一个实施例,表示待检测部件的数据包括从起因于由于所述传感器的发射元件发射的同一超声波信号而由所述传感器的一个、多个或每个接收元件接收的超声波产生的a-scan。
29、按照一个实施例,表示待检测部件的数据包括从由于所述传感器的对应发送元件连续发射的多个超声波射击,并且优选地由于所述传感器的多个不同的发射元件连续发射的多个相应的超声波射击,由所述传感器的一个、多个或每个接收元件接收的超声波产生的a-scan。按照一个实施例,表示待检测部件的数据包括矩阵,所述矩阵包括从多个连续的超声波射击,以及由于所述超声波射击而由待检测部件反射并由多个接收元件接收的波产生的a-scan。
30、按照一个实施例,表示待检测部件的数据包括针对在获取步骤期间发射的多个超声波射击中的一个、多个或每个超声波射击的部分图像,其中对表示待检测部件的数据实施校正包括修改所述部分图像,以便模拟待检测部件从所述部分图像中所示的换能器和待检测部件之间的相对位置到参考位置的移动以生成校正后的部分图像的步骤。
31、按照一个实施例,根据起因于同一超声波射击的被待检测部件反射的波生成部分图像。按照一个实施例,部分图像的每个点被确定为a-scan的函数,所述a-scan是从在同一超声波信号的发送之后被待检测部件反射并由接收元件接收的波产生的。
32、按照一个实施例,所述方法包括根据校正数据生成表示待检测部件的图像。按照一个实施例,所述方法还包括通过叠加多个校正后的部分图像来生成表示待检测部件的图像的步骤。
33、这样的部分图像和校正的部分图像允许获得表示待检测部件的图像,因此允许快速且清晰地获得关于待检测部件(例如,关于存在于待检测部件中的缺陷的位置、尺寸和其他特征)的信息。
34、按照一个实施例,表示待检测部件的数据包括矩阵,所述矩阵的每一行包括在相应的超声波射击之后生成的表示待检测部件的数据,所述矩阵的每一列包括从所述传感器的相应接收元件生成的表示待检测部件的数据,校正移动的计算包括对于每个超声波射击,计算用所述传感器的接收元件的数量表示的相应接收偏移,实施校正包括针对所述矩阵的一行、多行或每一行,对于所述行的单元实施对应接收偏移的所述单元的内容的用列的数量表示的偏移。
35、按照一个实施例,所述监听持续时间具有等于超声波射击的发射时刻的开始时刻,其中所述监听持续时间大于或等于超声波射击的发射和所述传感器的所述接收元件之一接收由待检测部件的与所述传感器相对的表面反射的波之间的最大飞行时间,以便根据在超声波射击的发射时刻和一个或多个接收元件对起因于所述超声波射击被待检测部件反射的波的接收时刻之间的传播时间期间传感器和待检测部件之间的相对移动,来计算校正移动。按照一个实施例,最终接收时刻对应于监听持续时间,即,从该时刻算起,在超声波射击之后一个或多个接收元件被配置为不再接收超声波,特别是起因于所述超声波射击的超声波。换句话说,按照一个实施例,根据在同一超声波射击从其发射传播到一个或多个接收元件接收起因于该超声波射击且由待检测部件反射的波期间所述传感器和待检测部件之间的相对移动,来计算校正移动。
36、按照一个实施例,表示待检测部件的数据包括对于每个接收元件,将所述接收器接收的波的强度表示为所述接收元件的监听时间的函数的相应a-scan。
37、按照一个实施例,计算校正移动包括将接收元件的相应a-scan划分为多个时间块。
38、按照一个实施例,计算校正移动包括根据所述传感器和待检测部件之间的相对移动来计算所述多个接收元件中的所述接收元件之一的信号接收持续时间。按照一个实施例,所述a-scan之一的每个时间块具有对于所述传感器相对于待检测部件的相对移动,等于接收元件的接收持续时间的持续时间。
39、按照一个实施例,所述接收元件之一的信号接收持续时间对应于其中在所述传感器和待检测部件之间的相对移动期间所述接收元件接收从待检测部件连续发射的信号的持续时间,其中大于该接收持续时间的持续时间导致所述连续信号被相邻的接收元件接收。
40、按照一个实施例,一个、多个或每个时间块具有与接收从待检测部件反射的允许生成所述a-scan的波的接收器的信号接收持续时间相等的持续时间。
41、按照一个实施例,计算校正移动包括根据接收元件的相对位置、所述接收元件的信号接收持续时间和超声波信号的发送时刻,计算用接收元件的数量表示的偏移。
42、按照一个实施例,偏移是表示对于原始a-scan的给定时间块,必须使所述时间块在待检测部件和所述传感器之间的相对移动方向上偏移的a-scan的数量的整数。换句话说,偏移表示原始a-scan和对于相同时间范围,所述时间块必须被分配给的目标a-scan之间的a-scan的数量。
43、按照一个实施例,对于原始a-scan的给定时间块,偏移等于在所述传感器和待检测部件之间的相对移动方向上的从接收所述原始a-scan的反射波的接收元件开始接下来的连续接收元件的最大数量,即,作为参考位置和部件的旋转方向的函数,其中信号接收持续时间的累积和小于参考时刻和所述时间块的开始时刻之间经过的时间。
44、按照一个实施例,实施校正包括对于原始a-scan的至少一个时间块,用所述时间块替换目标a-scan的一部分,其中所述目标a-scan对应于在所述传感器和待检测部件之间的相对移动方向上从接收原始a-scan的反射波的一部分能量的接收器之后的第n个接收元件生成的a-scan,其中n是计算的偏移,目标a-scan的部分具有与时间块相同的开始和结束时刻。
45、按照一个实施例,所述传感器和待检测部件之间的相对移动起因于待检测部件的移动以及在待检测部件的移动期间所述传感器被保持在固定位置,待检测部件的移动具有绕旋转轴的角度分量,校正移动的计算包括计算在所述传感器和待检测部件之间的所述相对移动期间待检测部件的角移动的步骤。
46、按照一个实施例,计算校正移动包括计算在所述传感器和待检测部件之间的所述相对移动期间待检测部件的角移动的步骤,并且其中校正表示待检测部件的数据包括模拟待检测部件以与获取步骤中待检测部件的角移动对应的角度绕其旋转轴的旋转。
47、因此,通过直接校正a-scan,通过考虑到待检测部件和传感器之间的相对移动,包括当相同的超声波射击在待检测部件内部传播时,可以获得待检测部件的清晰且精确的图像。
48、按照一个实施例,所述传感器和待检测部件之间的相对移动可以具有不同的特性。
49、按照一个实施例,所述传感器和待检测部件之间的相对移动起因于待检测部件的移动以及在待检测部件运动期间所述传感器被保持在固定位置。按照一个实施例,待检测部件的移动具有绕旋转轴(例如,在管道形式的待检测部件的背景下,管道的纵轴)的角度分量。按照一个实施例,待检测部件的移动具有沿纵轴(例如,被测管道的纵轴)的纵向分量。例如,待检测部件被设置为相对于传感器的螺旋移动。按照一个实施例,所述传感器和待检测部件之间的相对移动起因于传感器的运动以及待检测部件被保持在固定位置。
50、按照一个实施例,计算校正移动包括计算待检测部件的角移动的步骤。按照一个实施例,计算校正移动包括计算所述传感器和待检测部件之间沿所述传感器和待检测部件之间的相对移动轴的相对移动。
51、按照一个实施例,根据校正后的a-scan生成表示待检测部件的图像。
- 还没有人留言评论。精彩留言会获得点赞!