低信号处理负荷情况下具有高距离分辨率的雷达方法及雷达系统与流程
本发明涉及一种用于雷达系统的方法(或一种运行雷达系统的方法)和一种用于机动车辆中的驾驶辅助系统的雷达系统。根据本发明,雷达系统在信号处理负荷小的情况下具有高的距离分辨率。
背景技术:
1、越来越多的机动车辆配备有驾驶辅助系统,这类系统借助传感器系统检测周围环境,并且以由此识别的交通情形启动车辆的自动反应和/或对驾驶员做出指示,尤其是提出警告。在此,人们区分出舒适性功能和安全功能。
2、在目前的研发中,作为舒适性功能,全速范围自适应巡航控制(fsra=full speedrange adaptive cruise control)起着重要作用。只要交通情形允许这一点,那么车辆将固有速度调节到驾驶员预先设置的期望速度,否则使固有速度自动适配于交通情形。此外,随着朝至少部分自动的变道功能(lane change assist)的扩展,变道辅助系统的重要性也在不断提高。
3、除了提高舒适性以外,安全功能也越来越受到关注,其中,在紧急情况下缩短制动路径或停车路径起着重要作用。相应的驾驶辅助功能的范围从减少制动等待时间的制动装置自动预充注直至自主紧急制动。
4、对上述类型的驾驶辅助系统,如今主要使用雷达传感器。它在不良天气条件下也能可靠工作,并且除了测量与对象的距离以外也可通过多普勒效应直接测量对象的径向相对速度。在此所使用的发射频率尤其为24ghz和77ghz。
5、上述的功能需要相当高的传感器作用范围,同时需要较高的距离测量精度、距离测量分辨率和距离测量分离性能。因此,高的距离分辨率和距离分离性能也是重要的,因为由此至少可部分弥补机动车辆雷达传感器(由其小尺寸造成)的角度分辨率和角度分离性能不足。然而,同时的高的作用范围和距离分辨率通常需要高的数字信号处理负荷,这很难实现,因为如今用于机动车辆中的相应的信号处理器只能在有限范围内使用和/或是成本高昂的。
6、在de 10 2013 200 404 a1和wo 2018/086783 a1中提出了以下方法,其应在数字信号处理负荷适度的情况下允许高的作用范围和高的距离分辨率。然而,这些方法尤其在相对径向速度较高情况下未能实现高的距离分辨率的目标,并且也具有降低的灵敏度、即作用范围。
技术实现思路
1、本发明的任务是,提供一种用于雷达传感器的方法及一种雷达传感器,其中,对于相对运动的对象,也能在数字信号处理负荷适度的情况下同时实现大的作用范围和高的距离分辨率。
2、该任务原则上借助根据权利要求1和13的雷达方法或雷达系统解决。在从属权利要求中提出了本发明的适宜的设计方案。在此,根据本发明示出了,如何设计雷达调制和信号评估,以便针对与对象的距离和对象的相对速度实现高的测量精度和高的测量分辨率。
3、本发明的优势在于,可以利用目前对于机动车辆应用可用的并且比较有利的信号处理器来实现同时具有高的作用范围和高的距离分辨率的传感器,以便例如可以实现下一代的高要求的驾驶辅助系统。这类信号处理器通常具有简单的设计结构,并且此外还具有以下优势,即其消耗的电能更少。
4、在根据本发明的用于检测周围环境的雷达系统的方法中,该雷达系统具有用于辐射发射信号的发射装置,发射信号包含至少近似相同的单一信号的序列。在单一信号的序列上,单一信号的频率位置(其特征尤其在于它们的中心频率)和其时间间隔(必要时分别除了变化的和至少近似无均值的分量以外)至少近似线性地改变。在此,时间间隔的相对变化量至少是频率位置的相对变化量的大约两倍,其中,这些变化的符号是相反的。
5、适宜地,单一信号的频率位置、时间间隔和/或相位位置可以与随机的或伪随机的分量叠加。
6、单一信号的频率优选线性调制,并且频率调制的斜率对于所有单一信号而言至少大致相同,其中,各个发射信号是频率斜坡。
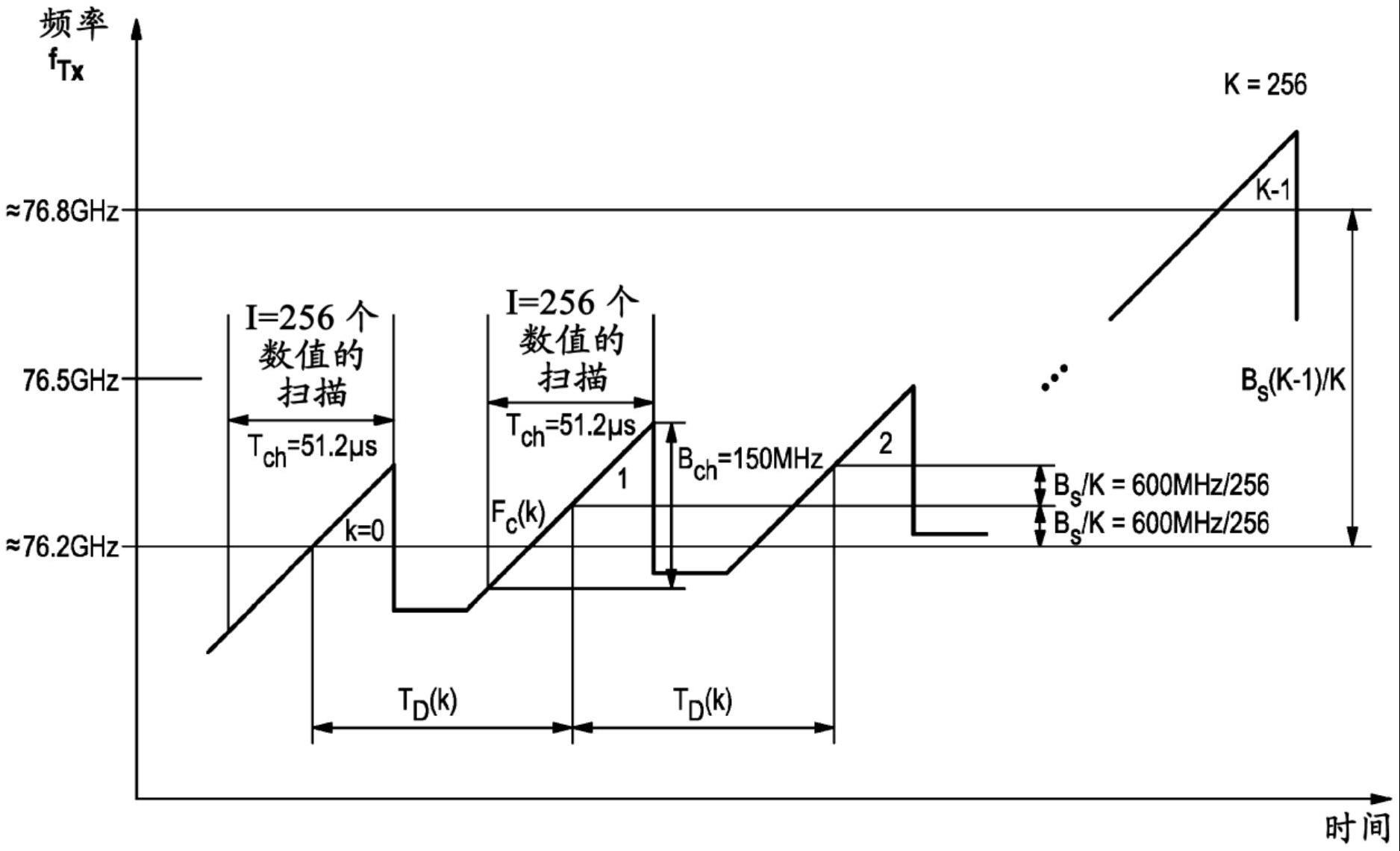
7、根据方法的有利的设计方案,对于下文利用k=0、...、k-1编号的k个频率斜坡,可分别针对多个接收信道获得下文利用i=0、...、i-1编号的i个数字接收值。随后,可分别通过i·k个接收值进行二维离散傅里叶变换,必要时不完全地并且优选借助一维快速傅里叶变换进行该二维离散傅里叶变换,在此,由接收值指数维度i在变换后产生的维度可被称为距离门j=0、...、j-1,并且由频率斜坡维度产生的维度可被称为多普勒门l=0、...、l-1。
8、此外,频率位置的线性变化和各个频率斜坡的时间间隔可以导致,当对象向着或离开雷达系统运动,即具有相对径向运动分量时,在二维离散傅里叶变换后在对象上被反射的发射信号的接收信号也会导致尖锐的功率峰值。
9、可以有利的方式对频率斜坡的频率位置的线性变化加以考虑,方法是为了确定对象的径向相对速度,对象的在二维离散傅里叶变换后的功率峰值的位置在多普勒门维度l中主要通过与距离门维度j线性相关的分量被校正。在此,线性因子由在频率斜坡上的频率位置的变化和在各个频率斜坡期间的接收时间范围内的频率的变化的商得出。功率峰值的位置优选通过内插确定,由此,针对距离门维度j和/或多普勒门维度l通常产生非整数值。
10、适宜地,可对各个频率斜坡的频率位置的线性变化加以考虑,方法是在对每个频率斜坡k=0、....、k-1的i个接收值进行一维离散傅里叶变换后,在相应的情况下,在距离门维度j中产生的数值的相位分别通过与乘积2π·j·k/k成比例的相位分量来校正,其中,比例因子主要由在频率斜坡上的频率位置的变化和在各个频率斜坡期间的接收时间范围内的频率的变化的商得出。然后,可通过与长度为1的复数指针和相应的相位相乘实现校正。
11、k个单独的发射信号的序列可循环重复,其中,在各个发射信号上的线性频率位置变化的斜率随序列至少有时(即至少在一个序列或多个序列之一中)被改变,尤其是为了提高径向的距离测量精度和/或相对速度测量精度和/或在与其他的雷达系统发生干扰方面是更稳定的。
12、各个发射信号优选表示频率斜坡,其中,具有相反的斜率,即相差因子-1的斜率的两个周期用于对象的精确的径向的距离测量和/或相对速度测量。在此,对象的在二维离散傅里叶变换后的功率峰值的在两个周期内产生的位置的和与差仅主要用于多普勒门维度中,而不用于距离门维度中。
13、此外,k个单独的频率斜坡的序列可循环重复,其中,尤其是为了在与其他的雷达系统的干扰方面更稳定,频率斜坡的斜率随序列至少有时自动改变,即至少在一个序列中自动改变。
14、适宜地,k个单独的发射信号的序列可循环重复,其中,尤其是为了解决在确定径向相对速度方面的模糊性和/或在与其他的雷达系统的干扰方面具有更高的稳定性,平均时间间隔随序列至少有时改变,即至少在一个序列中改变。
15、可优选通过多个发射天线和/或接收天线实现多个接收信道。此外,除了分别通过i·k个接收值进行的二维离散傅里叶变换以外,在接收信道上或为了生成接收信道还可设置数字波束成形。
16、此外,本发明还要求保护一种用于检测周围环境的雷达系统,该雷达系统包括用于辐射发射信号的发射装置,发射信号包括至少近似相同的单一信号的序列。雷达系统的特征在于,在单一信号的序列上,单一信号的频率位置(频率位置的特征尤其在于其中心频率)和其时间间隔(必要时分别除了变化的和至少近似无均值的分量以外)可至少近似线性地改变。在此,时间间隔的相对变化量至少是频率位置的相对变化量的大约两倍,其中,这些变化的符号是相反的。
- 还没有人留言评论。精彩留言会获得点赞!