振动型角速度传感器的制作方法
本发明涉及一种振动型角速度传感器,尤其涉及一种具备在振子中诱发一阶振动的一次侧控制电路和检测并输出因施加于振子的角速度而在振子产生的二阶振动的二次侧控制电路的振动型角速度传感器。
背景技术:
1、以往,已知有振动型角速度传感器。这种振动型角速度传感器例如在日本特开2009-115559号公报及日本专利第6463335号中公开。
2、在日本特开2009-115559号公报中,在环状的元件部和环状的元件部的径向外侧且以圆周状配置有多个电极。多个电极包括主电极和次电极。通过对主电极和次电极中的一者施加交流电压,在环状的元件部连接有产生一阶振动的交流电源。并且,在主电极与次电极中的另一个上连接有检测在环状的元件部产生的电信号的大小的检测机构。而且,若在环状的元件部产生一阶振动的状态下,围绕元件部的法线方向产生旋转运动,则在元件部产生与旋转运动的角速度相对应的二阶振动。而且,通过与主电极和次电极中的另一个连接的检测机构,检测因二阶振动而在主电极和次电极中的另一个产生的电信号的大小。并且,根据检测到的电信号的大小来将用于消除二阶振动的交流电压施加于主电极和次电极中的一个。而且,根据用于消除二阶振动的交流电压的大小来运算角速度的大小。
3、并且,在如日本特开2009-115559号公报中所记载那样的以往的振动型角速度传感器中,在由振动型角速度传感器检测的角速度中包含有偏置成分(即使在未施加角速度的状态下也由传感器输出的自零点的误差)。偏置成分是因振动型角速度传感器中所包括的陀螺元件的非对称性等而产生的。因此,如日本特开2009-115559号公报那样的以往的振动型角速度传感器构成为,切换连接有交流电源的电极(主电极和次电极中的一个)和连接有检测机构的电极(主电极和次电极中的另一个)。而且,通过对切换前后的振动型角速度传感器的输出进行差分运算来消除偏置成分。
4、在此,在如日本特开2009-115559号公报中所记载那样的、切换连接有交流电源的电极和连接有检测机构的电极而消除偏置成分的振动型角速度传感器中,有时会产生未被消除而残留的偏置成分。此时,残留的偏置成分根据周围环境的温度而发生变动。
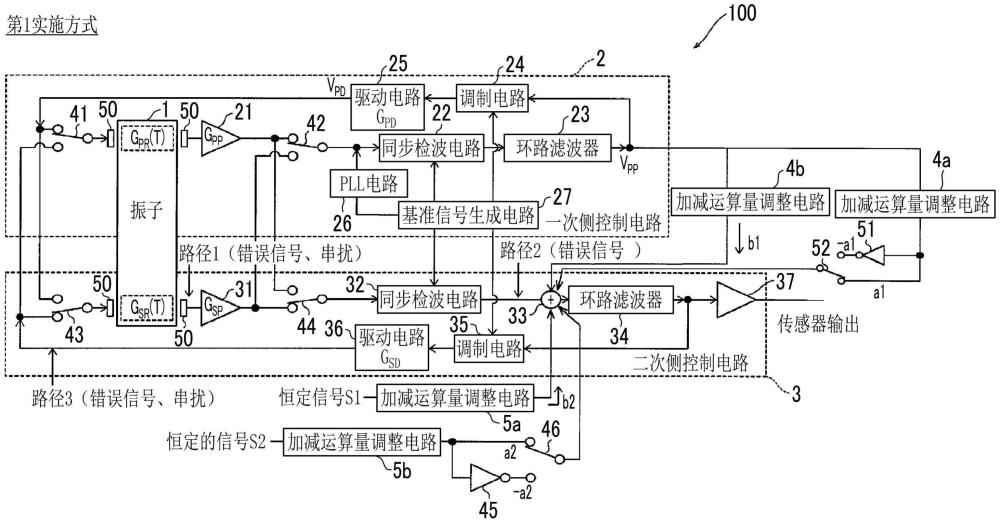
5、在日本专利第6463335号中公开了一种振动型角速度传感器,其具备在振子中诱发一阶振动的一次侧控制电路和检测并输出因施加于振子的角速度而在振子上产生的二阶振动的二次侧控制电路。在该振动型角速度传感器中,一次侧控制电路和二次侧控制电路均由闭合的控制环路构成。并且,在二次侧控制电路闭合的控制环路中加上基于与振子的增益的温度变化成反比的一次侧控制电路的输出的第1偏移值和基于不依赖于温度的恒定的信号的第2偏移值。由此,减少由从一次侧控制电路向二次侧控制电路的串扰引起的误差(与振子的增益的一次方及平方成反比的误差)。另外,调整第1偏移值及第2偏移值,以减少由从一次侧控制电路向二次侧控制电路的串扰引起的误差。由此,进行来自二次侧控制电路的传感器输出的校正。其结果,能够减少来自振动型角速度传感器的输出的温度变动(根据周围的温度而输出值改变)。
6、而且,对于如日本特开2009-115559号公报中所记载的切换连接有交流电源的电极和连接有检测机构的电极而消除偏置成分的振动型角速度传感器,在切换前后分别应用日本专利第6463335号的结构,由此能够减少残留的偏置成分的温度变动。
7、以往技术文献
8、专利文献
9、专利文献1:日本特开2009-115559号公报
10、专利文献2:日本专利第6463335号
技术实现思路
1、发明要解决的技术课题
2、然而,如日本特开2009-115559号公报中所记载那样,为了切换连接有交流电源的电极和连接有检测机构的电极而消除偏置成分,切换前后的振动型角速度传感器的控制的对称性变得重要。在此,若在切换前后,应用日本专利第6463335号的结构,针对切换前后单独设定第1偏移值及第2偏移值,则通常切换前后的第1偏移值及第2偏移值不对称。因此,若在切换前后设定不对称的第1偏移值及第2偏移值,则振动型角速度传感器的控制的对称性破坏,因此存在未被消除而残留的偏置的温度变动成分有时会变大的问题。
3、本发明是为了解决如上所述的课题而完成的,本发明的目的之一在于提供一种振动型角速度传感器,其能够抑制未被消除而残留的偏置的温度变动成分变大。
4、用于解决技术课题的手段
5、为了实现上述目的,基于该发明的第1方面的振动型角速度传感器具备:振子;一次侧控制电路,具有闭合的控制环路,闭合的控制环路的输出使振子诱发一阶振动;及二次侧控制电路,构成为具有检测因施加于振子的角速度而在振子中产生的二阶振动的闭合的控制环路,并且通过将偏移值加到闭合的控制环路来进行传感器输出的校正,所述振动型角速度传感器构成为能够切换由一次侧控制电路在振子中诱发一阶振动的电极,并且构成为能够切换由二次侧控制电路检测振子的二阶振动的电极,切换后的偏移值和切换前的偏移值为相对于规定的基准值对称的值。
6、在基于该发明的第1方面的振动型角速度传感器中,如上所述,构成为能够切换由一次侧控制电路在振子中诱发一阶振动的电极,并且构成为能够切换由二次侧控制电路检测振子的二阶振动的电极,切换后的偏移值和切换前的偏移值为相对于规定的基准值对称的值。由此,在所切换前后,偏移值相对于规定的基准值对称,因此能够抑制切换前后的振动型角速度传感器的控制的对称性破坏。其结果,能够抑制未被消除而残留的偏置的温度变动成分变大。
7、在基于上述第1方面的振动型角速度传感器中,优选为二次侧控制电路构成为,在闭合的控制环路内包括环路滤波器,并且通过将偏移值加到环路滤波器的输入来进行传感器输出的校正。在此,闭合的控制环路中的输出与环路滤波器的输出相对应。而且,环路滤波器的输出通过闭合的控制环路的回馈动作而与依赖于温度的振子的增益(gain)成反比。在本发明中,着眼于这一点,通过将偏移值加到环路滤波器的输入,能够减少与振子的增益的一次方和/或平方成反比的由串扰引起的误差。
8、在基于上述第1方面的振动型角速度传感器中,优选为在将切换前的偏移值设为a的情况下,切换后的偏移值为切换前的偏移值的极性被反转的-a。若如此构成,则在切换前后,偏移值相对于零对称,因此能够抑制切换前后的振动型角速度传感器的控制的对称性破坏。
9、在基于上述第1方面的振动型角速度传感器中,优选为在将切换前的临时的偏移值设为a、将切换后的临时的偏移值设为-a、将相对于切换前的传感器输出和切换后的传感器输出的中位值的临时的偏移值设为b的情况下,切换前的偏移值为a+b,切换后的偏移值为-a+b。若如此构成,则在切换前后,偏移值相对于b对称,因此能够抑制切换前后的振动型角速度传感器的控制的对称性破坏。并且,切换前后的偏移值与相对于切换前后的传感器输出的中位值的偏移值b对称,因此能够一边降低偏置成分的残渣相对于环境的温度的梯度,一边抑制切换前后的振动型角速度传感器的控制的对称性破坏。另外,“临时的”是指,直到求出最终偏移值为止的中间阶段的偏移值。
10、在基于上述第1方面的振动型角速度传感器中,优选构成为,在以模拟方式校正传感器输出的情况下,在二次侧控制电路闭合的控制环路中,为了进行与来自二次侧控制电路的振子的增益的温度变化的平方成反比的传感器输出的校正,加上基于与振子的增益的温度变化成反比的一次侧控制电路的输出的第1偏移值及为了进行与来自二次侧控制电路的振子的增益的温度变化成反比的传感器输出的校正,加上基于不依赖于温度的恒定的信号的第2偏移值,并且调整第1偏移值及第2偏移值的相加量,由此进行传感器输出的校正。在此,在将基于不依赖于温度的恒定的信号的第2偏移值加到二次侧控制电路闭合的控制环路的情况下,二次侧控制电路的输出具有与依赖于温度的振子的增益成反比的特性。并且,一次侧控制电路的输出也同样地,具有通过闭合的控制环路的回馈动作而与振子的增益成反比的特性,因此将基于具有与振子的增益成反比的特性的一次侧控制电路的输出的第1偏移值加到二次侧控制电路闭合的控制环路,由此二次侧控制电路的输出具有与振子的增益的平方成反比的特性。即,通过将与振子的增益的平方相对应的第1偏移值和与振子的增益的一次方相对应的第2偏移值进行相加,并且调整第1偏移值及第2偏移值的相加量,进行传感器输出的校正,由此能够进行与振子的增益的一次方成反比的校正和与振子的增益的平方成反比的校正。
11、此时,优选构成为,在将依赖于振子的温度的增益设为gr(t),将a、b及c设为不依赖于温度的恒定值的情况下,由于从构成二次侧控制电路的电路块产生的错误信号而在二次侧控制电路闭合的控制环路中产生的传感器输出的误差和由于从一次侧控制电路向二次侧控制电路的串扰而在二次侧控制电路闭合的控制环路中产生的传感器输出的误差的总计vouttotal
12、__error由以下的数式表示,调整基于与振子的增益的温度变化成反比的依赖于温度的一次侧控制电路的输出的第1偏移值的相加量,以减少以下的数式的第1项即a/gr2(t),并且调整基于不依赖于温度的恒定的信号的第2偏移值的相加量,以减少以下的数式的第2项即b/gr(t),由此以模拟方式进行传感器输出的校正。若如此构成,则能够减少传感器输出的误差的1次(振子的增益的一次方)成分和2次(振子的增益的平方)成分这两者,因此能够可靠地提高校正的精确度。另外,虽然恒定值c残留,但是c为不依赖于温度的恒定值,因此不会对由温度变化引起的传感器输出的误差造成影响,由此在校正方面上没有问题。
13、[数式2]
14、
15、在基于上述第1方面的振动型角速度传感器中,优选构成为,在以数字方式校正传感器输出的情况下,对与振子的增益的温度变化成反比的依赖于温度的一次侧控制电路的输出进行量化,并且对于量化的一次侧控制电路的输出,将减少由温度变化引起的传感器输出的误差的偏移值加到二次侧控制电路,由此进行传感器输出的校正。若如此构成,则仅通过将减少由温度变化引起的传感器输出的误差的偏移值加到二次侧控制电路,就能够进行传感器输出的校正,因此与加上除了基于依赖于温度的一次侧控制电路的输出的偏移值以外的偏移值的情况不同,能够简化振动型角速度传感器的结构。
16、在基于上述第1方面的振动型角速度传感器中,优选为,振子包括环型振子。在此,环型振子具有对称的形状,因此基于一次侧控制电路的振动模式与基于二次侧控制电路的振动模式相似。因此,若将本发明应用于包括环型振子的振动型角速度传感器,则无需考虑振动模式差异的影响,因此能够容易地进行传感器输出的校正。
17、在基于上述第1方面的振动型角速度传感器中,优选为,一次侧控制电路包括:第1开关,设置于对振子的信号的输入侧;及第2开关,设置于来自振子的信号的输出侧,二次侧控制电路包括:第3开关,设置于对振子的信号的输入侧;及第4开关,设置于来自振子的信号的输出侧,通过切换第1开关及第2开关,由一次侧控制电路在振子中诱发一阶振动的电极被切换,通过切换第3开关及第4开关,由二次侧控制电路检测振子的二阶振动的电极被切换。若如此构成,则通过切换第1开关~第4开关,能够容易地切换由一次侧控制电路在振子中诱发一阶振动的电极和由二次侧控制电路检测振子的二阶振动的电极。
18、发明效果
19、根据本发明,如上所述,能够抑制未被消除而残留的偏置的温度变动成分变大。
- 还没有人留言评论。精彩留言会获得点赞!