一种自动起摆装置的控制方法
1.本发明涉及复合材料力学性能研究领域,特指一种自动起摆装置的控制方法。
背景技术:
2.力学性能试验是复合材料设计及制造的基础,其中悬臂梁摆锤冲击试验用于测试复合材料抗冲击和抗弯性能。《国标gb/t 1843-2008塑料悬臂梁冲击强度的测定》提出了复合材料摆锤冲击方法。目前,对于复合材料摆锤冲击试验的装置已有专利(cn 202748279 u、cn 210863346 u、cn 202956316 u、cn 213903179 u),主要用于单次冲击试验。然而,复合材料使役过程中往往遭受小能量多次冲击,例如石子、维修工具、金属小部件的撞击。专利(cn 205138915 u)公开了一种摆锤式冲击疲劳试验机,用于对材料的冲击韧度进行测定。但缺乏冲击过程检测,无法反馈冲击过程中的力-位移曲线特性,并且未考虑二次冲击影响。
3.因此,本发明人对此做进一步研究,研发出一种自动起摆装置的控制方法,本案由此产生。
技术实现要素:
4.本发明的目的在于提供一种自动起摆装置的控制方法,可避免多次疲劳冲击的问题。
5.为了实现上述目的,本发明的技术方案如下:
6.一种自动起摆装置的控制方法,通过设置一起摆装置,包括冲击器,冲击器连接在摆杆端部,摆杆枢接在支架上;支承臂,支承臂设置在支架上,位于摆杆一侧,支承臂的摆动通过驱动电机驱动,支承臂的端部设置有支杆;档杆,档杆以能伸缩的方式设置在摆杆的摆动路径上;在支架上设置有两个接近开关,接近开关分别作为落摆初始位置和起摆初始位置;
7.首先由驱动电机将冲击器起摆到落摆初始位置,当触碰接近开关后停下;随后,驱动电机反转并恢复到起摆初始位置;然后,启动落摆,连接于摆杆上的冲击器作圆周运动并以一定动能冲击试样,试样反作用力使摆杆反弹;挡杆被推出,摆杆反弹后再次下落,但被挡杆阻止;接着,电机驱动支承臂将摆杆抬升,支撑臂触碰接近开关并恢复到起摆初始位置。
8.通过对摆杆的驱动以及自由摆动中的限制,来实现避免材料的二次冲击疲劳。
9.进一步,驱动电机采用步进电机或伺服电机,电机配有减速器。
10.上述方式可以提高电机输出扭矩,实现较重冲击器的抬升。
11.进一步,支架包括摆锤支架、起摆驱动支架、检测支架,其中摆锤支架设置在起摆驱动支架上方,检测支架设置在起摆驱动支架一侧。
12.进一步,在摆锤支架和检测支架上各设置有接近开关,接近开关分别作为落摆初始位置和起摆初始位置的机械微动开关与支承臂互动。
13.当支承臂触碰落摆初始位置的接近开关时,支承臂反向旋转回到起摆初始位置;当支承臂触碰起摆初始位置的接近开关时,支承臂停止旋转,等待落摆冲击;其中,落摆初始位置是指支承臂位于高位时,起摆初始位置是指支承臂位于低位时。
14.进一步,档杆通过直线运动组件控制。
15.直线运动组件可采用常用的气缸、直线电机、电磁推杆等。
16.进一步,档杆的推出时机通过红外对射传感器触发,红外对射传感器用于感应冲击器的落下。
17.进一步,摆杆的转轴设置有旋转编码器,冲击器处设置有压力传感器。
18.旋转编码器宜采用具有较大分辨率的编码器,因为冲击头作用力行程极短,需要较大分辨率的编码器来提取编码信号;压力传感器通过电荷放大器、ad信号转化后连接于信号采集模块,信号采集模块汇总冲击冲击过程的冲击力和旋转编码信息,通过分析过滤掉冲击前后的无用信息,可获得冲击短时间内的冲击力-位移数据。
19.进一步,在落摆初始位置处设置有摆锤插销,摆锤插销处于伸出状态时阻挡摆杆自由下落,摆锤插销缩进时摆杆进行摆动。
20.采用上述方案后,本发明与现有技术相比,具有以下优点:
21.针对多次疲劳冲击问题,引入自动起摆装置,并可在冲击过程进行信息采集,实现悬臂梁摆锤冲击试验的多次疲劳冲击及其过程数据采集。
附图说明
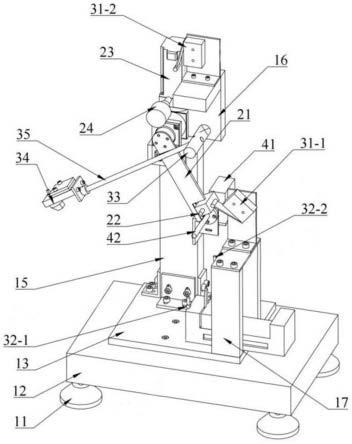
22.图1是本发明实施例的立体图;
23.图2是本发明实施例的侧视图;
24.图3是本发明实施例自动起摆示意图;
25.图4是本发明实施例防二次冲击示意图;
26.图5是本发明实施例自动起摆控制流程示意图;
27.图6是本发明实施例信号采集流程示意图。
28.标号说明
29.说明书附图中,带有-1、-2标号表示同一结构的部件。
具体实施方式
30.下面结合附图和具体实施例对本发明作进一步的说明。
31.如图所示,一种自动起摆装置的控制方法,其起摆装置包括机架、起摆驱动组件、检测组件、防二次冲击组件,其中
32.机架包括脚垫11、平台12、转接平台13,转接平台上方具有摆锤支架16、检测支架17和起摆驱动支架15。
33.检测组件包括红外对射传感器(32-1、32-2)、落摆初始位置的接近开关31-2、起摆初始位置的接近开关31-1、带有旋转编码器的摆杆转轴33和带有压力传感器的冲击器34。接近开关用于对圆形支杆的位置限定,旋转编码器用于检测摆杆在冲击事件时的旋转角度和转速,旋转编码器宜采用具有较大分辨率的编码器,因为冲击头作用力行程极短,需要较大分辨率的编码器来提取编码信号。
34.起摆驱动组件包括一驱动电机23,电机轴连接一转接件,转接件上连接支承臂21,支承臂末端连接一圆形支杆22,圆形支杆22可作用于摆杆35一侧,对摆杆施加旋转抬升作用力,使摆杆35和冲击器34回到落摆初始位置。
35.优选地,驱动电机23采用步进电机或伺服电机,电机配有减速器进一步提高扭矩,实现较重冲击器的抬升。
36.优选地,压力传感器采用环形压力传感器,当发生冲击事件时,压力传感器产生电荷信号,可用于换算冲击力信息。
37.当冲击器34到达撞击位置时,设置在试样前方的红外对射传感器,红外线被遮挡并触发冲击信号,红外对射传感器32通过检测冲击器是否遮挡红外线并反馈对射通断信号,对射传感器安装支架为可调,用于调试较合适的检测位置,红外对射传感器为优选方案,也可采用反射式传感器。
38.在落摆初始位置处设置有摆锤插销24,摆锤插销处于伸出状态时阻挡摆杆自由下落,摆锤插销缩进时摆杆进行摆动。
39.当支承臂21末端圆形支杆22触碰落摆初始位置的接近开关31时,支承臂反向旋转回到起摆初始位置;当支承臂末端圆形支架触碰起摆初始位置的接近开关31时,支承臂停止旋转,等待落摆冲击;机械微动开关为优选方案,也可采用其他接近开关方案,目的是在合适位置限制圆形支杆转动角度。
40.防二次冲击组件包括电磁推杆41,套接一螺旋弹簧,电磁推杆末端固结一挡杆42,挡杆穿过一滚珠轴承,挡杆在电磁推杆作用下可进行伸缩运动,当挡杆伸出时,可阻止冲击器二次撞击在试样上,电磁推杆失电时,螺旋弹簧可将档杆收回。电磁推杆41为优选方案,可以实现快速响应。
41.参考图3和图5,首先由驱动电机进行起摆,支承臂21抬升摆杆35起摆,将冲击器起摆到落摆初始位置,当触碰接近开关后停下,如图3-1所示。摆锤插销24伸出阻挡摆杆35,随后,驱动电机支承臂21反转并恢复到起摆初始位置,如图3-2所示。然后,摆锤插销24缩回,启动落摆,连接于摆杆上的冲击器作圆周运动并以一定动能冲击试样,如图3-3所示。
42.参考图4和图5,防二次冲击控制,当冲击器撞击试样(图4-1),试样的反作用力使冲击器反弹(图4-2)。此时,红外对射传感器触发,电磁推杆作用于挡杆,挡杆被推出,冲击器反弹后再次下落可被挡杆阻止(图4-3)。接着,电机驱动支承臂进行起摆运动,将摆杆抬升,支撑臂触碰接近开关并恢复到起摆初始位置。
43.冲击信号采集时,编码器连接于摆杆转轴,编码信号送入信号采集模块。压力传感器通过圆环形式套接于冲击器,压力传感器通过电荷放大器、ad信号转化后连接于信号采集模块。信号采集模块汇总冲击冲击过程的冲击力和旋转编码信息,通过分析过滤掉冲击前后的无用信息,可获得冲击短时间内的冲击力-位移数据。
44.上述仅为本发明的具体实施例,同时凡本发明中所涉及的如“上、下、左、右、中间”等词,仅作参考用,并非绝对限定,凡利用本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1