具有啮合表面的半导体封装的制作方法
具有啮合表面的半导体封装
1.相关申请案的交叉引用
2.本技术案主张2021年1月12日申请的标题为“用于改进的机械力耦合的封装内及表面上的结构化层(structured layers inside packages and on surfaces for improved mechanical force coupling)”的第63/136,236号美国临时专利申请案的优先权,且其全部内容特此以引用的方式并入本文中。
技术领域
背景技术:
3.力传感器用于检测所关注的部件所经历的一或多个力。在一些例项中,力传感器可用于检测所关注的部件(例如,轴件、支柱、梁)所经历的应力、扭矩、压缩、应变、张力等。为了促进这些力的检测,将力传感器(或其一些组件)安装到部件,因此在操作期间部件所经历的力可被传送到力传感器。
技术实现要素:
4.本文所描述的一些实例包含一种半导体封装。在一些实例中,所述半导体封装包含经配置以检测力的半导体裸片。另外,所述半导体封装包含覆盖所述半导体裸片的模制化合物。进一步来说,所述半导体封装包含啮合表面,所述啮合表面包含经调适以与所关注的部件上的安装表面啮合的突出部的图案。
5.在一些实例中,所述半导体封装包含具有第一侧及与所述第一侧相对的第二侧的裸片垫。另外,所述半导体封装包含安装到所述裸片垫的所述第一侧的半导体裸片,所述半导体裸片经配置以检测力。所述裸片垫的所述第二侧包含突出部的图案,所述突出部的图案经调适以啮合所关注的部件的安装表面中的凹陷部的图案。
6.在一些实例中,所述半导体封装包含裸片垫及安装到所述裸片垫的半导体裸片。另外,所述半导体封装包含具有第一侧及与所述第一侧相对的第二侧的模制化合物。所述化合物覆盖所述裸片垫及所述半导体裸片,且所述第二侧包含经调适以与所关注的部件上的安装表面啮合的突出部的图案。
附图说明
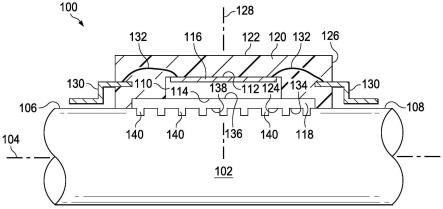
7.图1a是根据一些实例的用于安装到所关注的部件的力传感器的侧截面图。
8.图1b是根据一些实例的用于安装到所关注的部件的力传感器的仰视图。
9.图1c是根据一些实例的力传感器的啮合表面及所关注的部件的安装表面的放大横截面图。
10.图2a是根据一些实例的用于安装到所关注的部件的力传感器的仰视图。
11.图2b是根据一些实例的用于安装到所关注的部件的力传感器的仰视图。
12.图2c是根据一些实例的用于安装到所关注的部件的力传感器的仰视图。
13.图3是根据一些实例的用于安装到所关注的部件的力传感器的侧截面图。
14.图4a是根据一些实例的用于安装到所关注的部件的力传感器的侧截面图。
15.图4b是根据一些实例的用于安装到所关注的部件的力传感器的仰视图。
16.图5a是根据一些实例的用于安装到所关注的部件的力传感器的侧截面图。
17.图5b是根据一些实例的用于安装到所关注的部件的力传感器的侧截面图。
18.图6a是根据一些实例的用于安装到所关注的部件的力传感器的侧截面图。
19.图6b是根据一些实例的用于安装到所关注的部件的力传感器的侧截面图。
20.图7是根据一些实例的用于安装到所关注的部件的力传感器的侧截面图。
具体实施方式
21.力传感器可经安装到所关注的部件用于(例如,直接地、间接地)检测部件内的力。力传感器经安装到所关注的部件,且部件所经历的力可经由安装件传送到力传感器。一些安装装置或技术可能阻尼或吸收从所关注的部件传送的力,从而导致力传感器在操作期间检测这些力的效率降低。因此,将力传感器安装到所关注的部件可能对可由力传感器在操作期间获得的数据的质量产生有意义的影响。
22.在一些例项中,力传感器可用于检测沿所关注的部件的表面的特定方向上的力。然而,一些安装技术可能不允许力传感器充分检测这些目标力或力方向。因此,本文所描述的实例包含力传感器,所述力传感器包含啮合表面上的突出部,所述突出部将要与所关注的部件的安装表面啮合。在操作期间,突出部与安装表面的啮合可能放大特定的力或力方向。
23.现在参考图1a,根据一些实例的力传感器100被展示为安装到可围绕中心轴或纵轴104旋转的轴件102。轴件102可为泵、压缩机、传动系或其它机械系统的旋转轴件。力传感器100经安装到安装表面106,所述安装表面106可包含在轴件102的另外弯曲的外表面108上界定的平面或刻面表面。在一些实例中,力传感器100可经安装到另一所关注的部件,例如,例如梁、柱、铰链、翼(或翼片)、转子叶片或在操作期间可能经历力的任何其它机械或结构部件。
24.在操作期间,力传感器100可经由与安装表面106的啮合检测轴件102所经历的力。例如,轴件102可经历围绕纵轴104的扭矩、轴向应力(例如,来自沿纵轴104的拉伸或压缩)、弯曲应力、应变等。轴件102可能经历的这些各种力及应力在本文中可被统称为“力”。力传感器100可在操作期间(例如,直接地或间接地)检测这些力中的任何一或多者,从而允许人员监测轴件102的操作条件。
25.力传感器100是包含半导体裸片110的半导体封装。因此,力传感器100在本文中可被称为“半导体封装”。半导体裸片110具有装置侧112及与装置侧112相对的非装置侧114。在装置侧112上形成有源电路116(或更简单地“电路116”)。半导体裸片110的非装置侧114经由裸片粘接层(未展示)固定到裸片垫118。
26.模制化合物120(例如,聚合物或树脂材料)可覆盖半导体裸片110及裸片垫118。模制化合物120可保护半导体裸片110及裸片垫118免受外部环境(例如,特别是外部环境中的灰尘、液体、光、污染物)的影响,并可防止操作期间与导电表面或部件的非期望接触。如本文所提到,术语“模制化合物”包含通过任何合适的工艺形成的半导体裸片的覆盖物,例如
型腔模制操作、圆顶囊封、围堰填充(dam-and-fill)型囊封等。模制化合物120可包含第一侧122、与第一侧122相对的第二侧124及沿延伸穿过(例如,垂直地穿过)侧122、124的轴128在第一侧122与第二侧124之间延伸的外周边126。
27.电路116可经由接合导线132耦合到导电端子130。在一些实例中,导电端子130可为所谓的鸥翼形引脚。然而,力传感器100可包含四方扁平无引脚(qfn)封装,且导电端子130可经布置并设计为包含在其中。导电端子130可耦合到印刷电路板(pcb)(未展示)或其它合适的装置上的合适连接器。模制化合物120可覆盖接合导线132及导电端子130的一部分。
28.现在参考图1a到1c,力传感器100还可包含啮合表面134,所述啮合表面134由裸片垫118界定,并将要与轴件102的安装表面106啮合。更特定来说,裸片垫118包含与半导体裸片110啮合的第一侧136及与第一侧136相对的第二侧138。第二侧138可与模制化合物120的第二侧124齐平(或共面)。啮合表面134经界定于第二侧138上。在一些实例中,啮合表面134包含在操作期间将要与安装表面106啮合的突出部140的图案。
29.如图1b及1c中最佳展示,突出部140可彼此平行。此外,突出部140可沿与轴128的半径对准的平面彼此间隔。因此,突出部140可相对于轴128彼此径向间隔。突出部140及裸片垫118的第二侧138可含于模制化合物120的外周边126内(或由模制化合物120的外周边126定界)。
30.如图1c中最佳展示,在一些实例中,安装表面106可具有凹陷部142的图案,所述凹陷部142的所述图案在操作期间可与第二侧138上的突出部140对准,并接纳第二侧138上的突出部140。在图1c中,第二侧138与安装表面106经展示为沿轴128彼此分离,以更好地展示突出部140及凹陷部142。凹陷部142的形状、大小及布置可经选择以允许凹陷部142在第二侧138与安装表面106接触时与突出部140对准、啮合及互锁。因此,凹陷部142可沿着与轴128的半径对准的平面彼此间隔,且凹陷部142与突出部140类似,可相对于轴128彼此径向间隔。
31.在一些实例中,突出部140每一者可包含与第二侧138间隔(例如,相对于轴128轴向间隔)的脊部144及从脊部144延伸到第二侧138的一对侧面146。类似地,每一凹陷部142每一者可包含从安装表面106向内间隔的根部148及从安装表面106延伸到根部148的一对侧面150。在一些实例中,每一突出部140及每一凹陷部142可具有矩形横截面。因此,每一突出部140及凹陷部142的脊部144及根部148分别可为相对于轴128径向定向的平面表面。此外,侧面146中的每一者可从第二侧138垂直地(例如,相对于轴128轴向地)延伸到脊部144,且侧面150中的每一者可从安装表面106垂直地(例如,相对于轴128轴向地)延伸到根部148。在一些实例中,突出部140及凹陷部142的横截面可具有各种形状,例如三角形、半圆形、椭圆形、卵形、截顶三角形等。
32.在操作期间,当使力传感器100的啮合表面134与安装表面106接触时,突出部140插入凹陷部142内。在一些实例中,啮合表面134经由粘合剂或焊料材料与安装表面106啮合。在一些实例中,啮合表面134被焊接(例如,经由超声波焊接)到安装表面106。
33.在将力传感器100固定到安装表面106之后,由轴件102所经历的力可经由啮合表面134上的突出部140的图案与安装表面106之间的啮合传送到电路116。半导体裸片110可经配置以检测传送的力。特定来说,半导体裸片110的电路116可经由由力在电路116中引起
的压阻变化来检测传送的力。电路116还可产生包含(或指示)检测到的力的输出信号。在一些实例中,力传感器100可包含可处理来自电路116的输出及/或将来自电路116的输出传达到其它电子装置(例如,计算机、半导体封装)的额外组件(例如,半导体裸片、无源组件,例如天线、电容器、电阻器等)。如下文更详细描述,啮合表面134上的突出部140可促进轴件102与力传感器100之间的强连接,并可放大特定方向上的力(例如,例如与突出部140及凹陷部142垂直的方向)。
34.现在参考图2a到2c,根据一些实例展示每一者可为图1a到1c的力传感器100的力传感器200。图2a到2c在本文中被统称为“图2”。
35.在图2a到2c中,力传感器200可为半导体封装。因此,力传感器200在本文中可被称为“半导体封装”。力传感器200每一者可包含与模制化合物206的侧204齐平(或共面)的裸片垫202。如上文针对力传感器100所描述,半导体裸片(未展示)可经耦合到裸片垫202并由模制化合物206覆盖。模制化合物206包含外周边208,所述外周边208包含多个侧209。此外,力传感器200可包含多个导电端子210,所述多个导电端子210从模制化合物206的外周边208的一或多个侧209延伸出来。
36.裸片垫202(或其暴露侧)可界定力传感器200的啮合表面212,所述啮合表面212将要与所关注的部件上的安装表面(例如,图1a中的轴件102上的安装表面106)啮合。啮合表面212可包含突出部214的图案,所述突出部214可与上文针对力传感器100描述的突出部140类似。
37.明确参考图2a,在一些实例中,模制化合物206的外周边208的形状可为大致上矩形,且因此外周边208的相对侧209可彼此平行。此外,突出部214可在与模制化合物206的外周边208的两个相对侧209垂直的方向上线性延伸。不限于此或任何其它理论,图2a中的突出部214的定向可为力传感器200提供针对沿与突出部214垂直的方向导向的力的额外灵敏度。
38.明确参考图2b及2c,在一些实例中,突出部214可依与侧209中的每一者的非零、非平行且非垂直的角横跨裸片垫202延伸。因此,在图2b及2c的实例中,突出部214不与外周边208的侧209中的任一者垂直或平行地延伸。不限于此或任何其它理论,通过依一定角将突出部214横跨裸片垫202放置,力传感器200可对沿横跨模制化合物206的侧204的一对垂直或正交方向导向的力具有灵敏度。因此,图2b及2c的力传感器200在与模制化合物206的侧204平行延伸的平面内可具有多向灵敏度。
39.现在参考图3,根据一些实例展示可为图1的力传感器100的力传感器300。力传感器300是包含半导体裸片302的半导体封装。因此,力传感器300在本文中可被称为“半导体封装”。半导体裸片302具有装置侧304及与装置侧304相对的非装置侧306。在装置侧304上形成有源电路308(或更简单地“电路308”)。半导体裸片302的非装置侧306经由裸片粘接层(未展示)固定到裸片垫309。
40.模制化合物310(例如,聚合物或树脂材料)可覆盖半导体裸片302及裸片垫309。模制化合物310可保护半导体裸片302及裸片垫309免受外部环境(例如,特别是外部环境中的灰尘、液体、光、污染物)的影响,并可防止在操作期间与导电表面或部件的非期望接触。模制化合物310可包含第一侧312、与第一侧312相对的第二侧314及沿延伸穿过(例如,垂直地穿过)侧312、314的轴318在第一侧312与第二侧314之间延伸的外周边316。多个导电端子
320可延伸出模制化合物310的外周边316,且可经由接合导线322耦合到半导体裸片302的电路308。
41.力传感器300还可包含啮合表面324,所述啮合表面324由模制化合物310的第二侧314界定,所述第二侧314将要与所关注的部件328(例如,轴件102)的安装表面326啮合。更特定来说,裸片垫309凹陷到模制化合物310中。因此,裸片垫309被模制化合物310完全覆盖,且啮合表面324由模制化合物310的第二侧314界定。
42.在一些实例中,啮合表面324包含在操作期间将要与安装表面326啮合的突出部330的图案。突出部330可与上文描述的突出部140类似。在一些实例中,突出部330可与在安装表面326上以与上文针对突出部140及凹陷部142(图1c)描述类似的方式界定的类似形状的凹陷部332啮合。
43.在操作期间,啮合表面324可经由粘合剂、焊料材料、焊接或任何其它合适的方式固定到所关注的部件328的安装表面326。突出部330与凹陷部332之间的互连可放大特定方向上的力(例如,例如在与突出部330及凹陷部332垂直的方向上应用的方向)。
44.半导体裸片302可经配置以经由啮合表面324上的突出部330与安装表面326上的凹陷部332之间的连接来检测所关注的部件328所经历的力。明确来说,半导体裸片302的电路308可经由压阻变化检测力,并可产生包含(或指示)如上文所描述的检测力的输出信号。力传感器300可包含用于在如上文所描述的操作期间传达及/或处理来自电路308的输出的额外组件。
45.现在参考图4a及4b,根据一些实例展示可为图1的力传感器100的力传感器400。力传感器400是包含半导体裸片402的半导体封装。因此,力传感器400在本文中可被称为“半导体封装”。半导体裸片402具有装置侧404及与装置侧404相对的非装置侧406。在装置侧404上形成有源电路408(或更简单地“电路408”)。
46.非装置侧406界定啮合表面409,所述啮合表面409将要与所关注的部件412(例如,图1中的轴件102)的安装表面410啮合。在一些实例中,啮合表面409包含在操作期间将要与安装表面410啮合的突出部414的图案。
47.如图4b中最佳展示,横跨半导体裸片402的非装置侧406以多行416及多列418布置突出部414。在一些实例中,突出部414可经成形为截棱锥。然而,在其它实例中,突出部414可具有其它形状,例如长方体、球形、半球形等。突出部414可经由溅镀及电镀工艺在非装置侧406上形成。
48.若干无源装置420沿装置侧404耦合到电路408。无源装置420可经由焊料部件422(其可被称为“焊料凸块”)耦合到电路408。在一些实例中,无源装置420可包含电容器、电感器、天线、线圈及/或可独立于电路408或与电路408一起执行一个功能(或若干功能)的其它组件。在一些实例中,无源装置420可包含天线及滤波器,所述天线及滤波器耦合到电路408,且经配置以直接或经由网络接收无线电子信号及/或将无线电子信号发送到其它装置(例如,计算机、半导体芯片封装)。明确来说,在操作期间,由无源装置420形成或界定的天线可发射力传感器400的输出信号,所述输出信号可包含或指示由力传感器400检测到的力。
49.明确参考图4a,在操作期间,啮合表面409可耦合到安装表面410。特定来说,啮合表面409的突出部414可与沿安装表面410定位的一组突出部424啮合及/或配合。在一些实
例中,安装表面410上的突出部424可类似于啮合表面409上的突出部414成形。突出部424可经布置以定位在啮合表面409上的相邻突出部414之间。因此,在将啮合表面409固定到安装表面410时,突出部424可在突出部414之间交错。不限于此或任何其它理论,突出部424、414的交错可允许力沿穿过突出部424、414的平面从所关注的部件412传送到力传感器400。
50.在一些实例中,力传感器400可经由焊料材料426(例如,可熔化并重新固化以将两个物体或部件接合在一起的金属材料)固定到所关注的部件412。焊料材料426可在啮合表面409与安装表面410之间以及在交错的突出部414、424之间形成接合。因此,在操作期间,所关注的部件412所经历的力可经由突出部424、焊料材料426及突出部414从安装表面410传送到力传感器400。经由焊料材料426的突出部414、424的啮合可在力传感器4300与部件412之间提供安全接触,同时允许多个方向上的力检测灵敏度。
51.焊料材料426可通过任何合适的方式接合到啮合表面409(包含突出部414、424)。例如,局部加热可经应用以熔化焊料材料426并允许其在突出部414、424之间流动。在一些实例中,可将焊料材料426放置在啮合表面409与安装表面410之间,且然后将力传感器400、部件412及焊料材料426放置在具有高温的环境中(例如,烘箱、腔室)。周围环境的高热可导致焊料材料426熔化并在突出部414、424之间流动。
52.半导体裸片402可经配置以分别经由啮合表面324及安装表面410上的突出部414与424之间的连接来检测所关注的部件412所经历的力。明确来说,半导体裸片402的电路408可经由压阻变化检测力,并可产生包含(或指示)如上文所描述的检测力的输出信号。然后,无源组件420可在如上文所描述的操作期间传达及/或处理来自电路408的输出。
53.在一些实例中,半导体裸片402可经安装到裸片垫。因此,在一些实例中,裸片垫可界定具有突出部414的啮合表面409。
54.现在参考图5a及5b,根据一些实例展示可为图1的力传感器100的力传感器500。力传感器500是半导体封装,其每一者包含半导体裸片502。因此,力传感器500在本文中可被称为“半导体封装”。半导体裸片502具有装置侧504及与装置侧504相对的非装置侧506。在装置侧504上形成有源电路508(或更简单地“电路508”)。
55.非装置侧506界定啮合表面509,所述啮合表面509将要与所关注的部件的安装表面(例如,图1中的轴件102的安装表面106)啮合。在一些实例中,啮合表面509包含与上文针对力传感器400描述的突出部414类似的突出部514的图案。
56.若干无源装置520耦合到半导体裸片502的电路508。在图5a的实例中,无源装置520可经由焊料部件522(其可被称为“焊料凸块”)耦合到电路508。在图5b的实例中,无源装置520经由重新布线层524耦合到电路508。特定来说,重新布线层524是将无源装置520选择性地耦合到电路508(或其特定部分)的导电部件。无源装置520可经由可啮合(例如,焊接)到重新布线层524的多个导电部件526耦合到重新布线层524,且继而,重新布线层524经由焊料部件522耦合到电路508。
57.在一些实例中,无源装置520可与上文针对力传感器400描述的无源装置420类似。因此,在操作期间,无源装置520可执行上文针对无源装置420描述的相同功能。
58.力传感器500还包含可覆盖半导体裸片502的模制化合物530(例如,聚合物或树脂材料)。模制化合物530可保护半导体裸片502免受外部环境(例如,特别是外部环境中的灰尘、液体、光、污染物)的影响,并可防止在操作期间与导电表面或部件的非期望接触。模制
化合物530可包含第一侧532、与第一侧532相对的第二侧534及沿延伸穿过(例如,垂直穿过)侧532、534的轴538在第一侧532与第二侧534之间延伸的外周边536。在图5a中,模制化合物530的第二侧534与半导体裸片502的装置侧504啮合。在图5b中,模制化合物530的第二侧534与半导体裸片502的非装置侧506齐平(或共面)。
59.在操作期间,啮合表面509可固定到所关注的部件的安装表面(例如,图1中的轴件102上的安装表面106)。在一些实例中,啮合表面509可经由焊料材料(例如,上文描述的焊料材料426)与所关注的部件的安装表面啮合。此外,在一些实例中,突出部514可以与上文针对力传感器500描述的类似方式与安装表面上的突出部(例如,上述突出部424)交错。在操作期间,所关注的部件所经历的力可经由啮合表面509上的突出部514传送到力传感器500。
60.半导体裸片502可经配置以检测所关注的部件经由其间的连接所经历的力。明确来说,半导体裸片502的电路508可经由压阻变化检测力,并可产生包含(或指示)如上文所描述的检测力的输出信号。然后,无源组件520可在如上文所描述的操作期间传达及/或处理来自电路508的输出。
61.现在参考图6a及6b,根据一些实例展示可为图1的力传感器100的力传感器600。力传感器600是半导体封装,其每一者包含半导体裸片602。因此,力传感器600每一者在本文中可被称为“半导体封装”。每一力传感器600的半导体裸片602具有装置侧604及与装置侧604相对的非装置侧606。在装置侧604上形成有源电路608(或更简单地“电路608”)。半导体裸片602的非装置侧606经由焊膏(未展示)固定到裸片垫609。
62.力传感器600还可包含由裸片垫609界定的啮合表面610,所述啮合表面610将要与所关注的部件614的安装表面612啮合。更特定来说,裸片垫609包含与半导体裸片602啮合的第一侧616及与第一侧616相对的第二侧618。在第二侧618上界定啮合表面610。在一些实例中,啮合表面610包含与上文描述的力传感器100的突出部140类似的突出部620的图案。
63.在操作期间,突出部620可与安装表面612啮合,以便在裸片垫609的第二侧618与安装表面612之间维持间隔d。明确参考图6a,在一些实例中,安装表面612可为大体上平面的,且间隔d可由从第二侧618的突出部620的长度来界定。明确参考图6b,在一些实例中,安装表面612可包含若干凹陷部622,所述凹陷部622将要在其中接纳突出部620(例如,以与上文所描述以及图1a及1c中所展示的安装表面106上的凹陷部142类似的方式),且间距d可被界定为从第二侧618的突出部614的长度与从安装表面612的凹陷部622的深度之间的差。在任一情况下,间隔d可经选择以在第二侧618与安装表面612之间提供足够的间隙以在其中接纳粘合剂、焊料等。在一些实例中,间距d可经选择以将力传感器600提升到安装表面612上方,以防止力经由除通过啮合表面610(包含突出部612)之外的途径从所关注的部件614传送到力传感器600。在一些实例中,间距d的范围可从几微米到几毫米。在一些实例中,间隔d可允许突出部620在一定量值上阻尼(或缓冲)力,以减少对力传感器600或其组件的损坏。
64.半导体裸片602可经配置以检测所关注的部件614经由其间的连接所经历的力。明确来说,半导体裸片602的电路608可经由压阻变化检测力,并可产生包含(或指示)如上文所描述的检测力的输出信号。
65.现在参考图7,根据一些实例展示可为图1a到1c的力传感器100的力传感器700。力
传感器700是包含半导体裸片710的半导体封装。因此,力传感器700在本文中可被称为“半导体封装”。半导体裸片710具有装置侧712及与装置侧712相对的非装置侧714。在装置侧712上形成有源电路716(或更简单地“电路716”)。电路716可经由接合导线720以与上文针对力传感器100(图1a)的导电端子130及接合导线132描述的类似方式耦合到导电端子718。
66.模制化合物722(例如,聚合物或树脂材料)可覆盖半导体裸片710及裸片垫718。模制化合物722可保护半导体裸片710及裸片垫718免受外部环境(例如,特别是外部环境中的灰尘、液体、光、污染物)的影响,并可防止在操作期间与导电表面或部件的非期望接触。
67.力传感器700还可包含第一啮合表面724,所述第一啮合表面724由裸片垫718界定,并将要与所关注的部件(例如,图1a中的轴件102)的安装表面啮合。第一啮合表面724可与上文针对力传感器100描述的啮合表面134类似。因此,第一啮合表面724可包含突出部726的图案,所述突出部726在操作期间将要以与上文针对突出部140描述的类似方式与所关注的部件上的安装表面啮合。
68.另外,力传感器700可包含裸片垫718的一侧上的裸片垫718上的第二啮合表面728,所述第二啮合表面728与第一啮合表面724相对。第二啮合表面728可包含与上文描述的突出部140(图1a到1c)类似的突出部730的图案。突出部730可以与上文针对突出部140及凹陷部142(图1c)所描述的啮合类似的方式与形成在半导体裸片710的非装置侧714上的凹陷部732的图案啮合并互锁。在一些实例中,可在半导体裸片710的非装置侧714上形成突出部730,且可在裸片垫718上形成凹陷部732。
69.在操作期间,第二啮合表面728可增强从裸片垫718到半导体裸片718(并最终到电路716)的力传送。如上文所描述,啮合的突出部730及凹陷部732可促进半导体裸片710与裸片垫718之间的强连接,并可放大特定方向上的力(例如,例如与突出部730及凹陷部732垂直的方向)。
70.上文描述的实例包含力传感器,其包含将要与所关注的部件的安装表面啮合并在操作期间放大特定力或力方向的图案化突出部。因此,在本文所描述的实例力传感器的啮合表面上形成的突出部可增强力传感器到所关注的部件的连接以及力传感器在操作期间检测所关注的力的灵敏度。
71.虽然本文所描述的实例已包含用作力传感器(例如,力传感器100、200、300、400、500、600、700)的半导体封装,但本文所描述的一些实例可包含提供额外及/或不同功能性(例如,除力感测之外)的半导体封装。因此,一般来说,本文所描述的实例可包含具有如本文所描述的啮合表面的半导体封装,所述啮合表面可经安装到合适的部件或表面。
72.在本描述中,术语“耦合”可涵盖实现与本描述一致的功能关系的连接、通信或信号路径。例如,如果装置a提供信号以控制装置b执行动作,那么:(a)在第一实例中,装置a直接耦合到装置b;或(b)在第二实例中,如果中介组件c未实质性地改变装置a与装置b之间的功能关系,那么装置a通过中介组件c间接地耦合到装置b,因此装置b由装置a经由装置a所提供的控制信号来控制。
[0073]“经配置以”执行任务或功能的装置可由制造商在制造时配置(例如,编程及/或硬接线)以执行功能及/或可由用户在制造之后配置(或重新配置)以执行功能及/或其它额外或替代的功能。配置可通过装置的固件及/或软件编程,通过装置的硬件组件及互连的构造及/或布局,或其组合。
[0074]
本文中描述为包含某些组件的电路或装置可替代地经调适以耦合到那些组件以形成所描述的电路系统或装置。例如,描述为包含一或多个半导体元件(例如晶体管)、一或多个无源元件(例如电阻器、电容器及/或电感器)及/或一或多个源(例如电压及/或电流源)的结构可替代地仅包含单个物理装置(例如,半导体裸片及/或集成电路(ic)封装)内的半导体元件,且可经调适以在制造时或在制造之后由终端用户及/或第三方耦合到无源元件及/或源中的至少一些以形成所描述的结构。
[0075]
虽然本文中可将某些组件描述为特定工艺技术的组件,但这些组件可交换为其它工艺技术的组件。
[0076]
除非另有陈述,否则在一个值之前的“约”、“近似”或“大体上”意味着所陈述的值的+/-10%。在所描述的实例中修改是可能的,且在权利要求的范围内其它实例是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1